- 超音波センサ 信号の発信・受信処理機能
使用する超音波センサの指向性は、50°であり、、検知距離は、0.2~6.0mである。
実際の競技に使うとしての精度は、30~250まではほぼ正確に計れる。詳しい実験結果
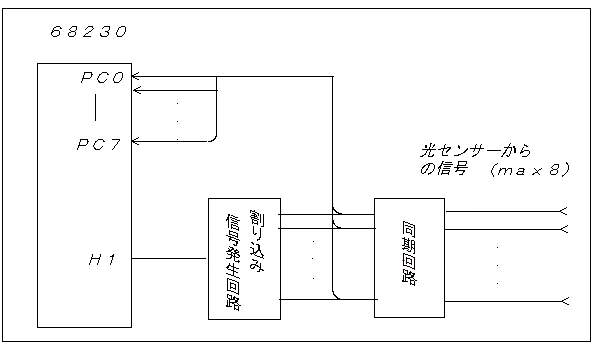
- 赤外線センサ 信号処理機能
割り込み信号部は、赤外線センサー受光部からの信号に変化が生じたときに割り込み信号を出すと思う。信号自体は、一発パルスではなく他の波形
になると思われる。 回路構成 指向性
- モータとロータリエンコーダ 回転及び回転数測定機能
ロータリーエンコーダは、回転軸の回転速度に比例した、互いに90°位相の異 なる2相の近似正弦波を出力しているもので、2相の位相関係から回転方向が判別できる。他に、2相の信号をカウントして回転数を求めることがで きる。
- タッチセンサ 信号の処理機能
タッチセンサは、チャタリングを除去し、前縁微分回路により同期信号の立ち上がり、立ち下がりを検出して割込み信号をソフトウェアにおくっている。
- 行動決定機能
行動の制御は、情報収集機能より与えられた情報に基づき行動計画部および行動司令部を制御する。
行動計画・指令は、行動指令機能より与えられた制御命令に基づき行動計画を立て、駆動部への指令値を決定する。
- 移動機能
本体駆動モータ指令値に基づき、本体の移動・姿勢変更を行なう。
《DCモーター制御機能》 移動情報より、モーターを駆動させ自機を動かす。
{kind=link}