前章では、ロボットに比例制御を実装しました。Pゲインを小さめに設定すれば安定した走りになりますが、急なカーブが曲がれなくなります。大きめにすると、カーブは曲がれますが、ロボットが振られてしまいます。
この章では、前章のプログラムを改良し、さらに安定した走りを目指します。
ロボットはこれまでのものを引き続き使います。
1.微分制御
微分制御(D制御)は、急激な出力値の変化が起こった場合、その変化の大きさに比例した入力を行うことで、その変化に抗しようとする役目を果たします。また、ハンチング(自励的な振動)を抑える働きをします。
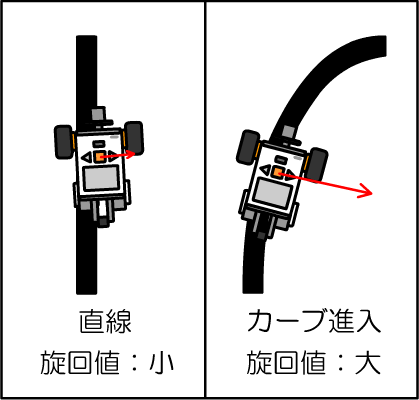
変化の大きさ(偏差の微分)に比例して出力を変化させるため、急にカーブに差し掛かった時や、ロボットが大きく振れているときは旋回値が大きくなります。
逆に、直線を走っているときなど、ロボットが安定しているときは、旋回値は小さくなります。(図)
ロボットのライントレースプログラムに、前章の比例制御に加え、微分制御を導入します。
次のプログラムをNXTにダウンロードしてください。
変化の大きさ(偏差の微分)に比例して出力を変化させるため、急にカーブに差し掛かった時や、ロボットが大きく振れているときは旋回値が大きくなります。
逆に、直線を走っているときなど、ロボットが安定しているときは、旋回値は小さくなります。(図)
ロボットのライントレースプログラムに、前章の比例制御に加え、微分制御を導入します。
次のプログラムをNXTにダウンロードしてください。
trace_pd.c
#include "kernel.h"
#include "kernel_id.h"
#include "ecrobot_interface.h"
#define PORT_LIGHT NXT_PORT_S3 /* 入出力ポートの定義 */
#define PORT_TOUCH NXT_PORT_S2
#define L_MOTOR NXT_PORT_B
#define R_MOTOR NXT_PORT_C
#define BLACK 700
#define WHITE 500
DeclareTask(Task1); /* Task1を宣言 */
void ecrobot_device_initialize(){ /* OSEK起動時の処理 */
nxt_motor_set_speed(L_MOTOR,0,1);
nxt_motor_set_speed(R_MOTOR,0,1);
ecrobot_set_light_sensor_active(PORT_LIGHT);
}
void ecrobot_device_terminate(){ /* OSEK終了時の処理 */
nxt_motor_set_speed(L_MOTOR,0,1);
nxt_motor_set_speed(R_MOTOR,0,1);
ecrobot_set_light_sensor_inactive(PORT_LIGHT);
}
void user_1ms_isr_type2(void){}
void sound_beep(){ /* ビープ音を鳴らすユーザ関数 */
ecrobot_sound_tone(600, 2, 80);
systick_wait_ms(20);
ecrobot_sound_tone(500, 5, 80);
systick_wait_ms(50);
}
TASK(Task1)
{
int speed=70;
float Kp = 0.4; //Pゲイン
float Kd = 1.6; //Dゲイン
int black,white,gray,light;
int err, err_prev;
float turn;
black = BLACK;
white = WHITE;
gray = (black + white) / 2;
while(1){
err_prev = 0;
while(ecrobot_get_touch_sensor(PORT_TOUCH) == 0){ /* TSが押されるまでループする */
display_clear(0);
display_goto_xy(0, 1);
display_string("PUSH START");
display_update();
systick_wait_ms(10);
}
systick_wait_ms(500); /* 500msec待つ */
//light_tmp = ecrobot_get_light_sensor(PORT_LIGHT);
while(ecrobot_get_touch_sensor(PORT_TOUCH) == 0){ // TSが押されるまでループする
//PD制御による旋回
light = ecrobot_get_light_sensor(PORT_LIGHT);
err = light - gray;
turn = Kp * err + Kd * (err - err_prev);
nxt_motor_set_speed(L_MOTOR,speed-turn,1);
nxt_motor_set_speed(R_MOTOR,speed+turn,1);
err_prev = err; /* 一つ前の誤差を格納 */
systick_wait_ms(10); /* wait 10msec*/
}
//停止
nxt_motor_set_speed(L_MOTOR,0,1);
nxt_motor_set_speed(R_MOTOR,0,1);
systick_wait_ms(1000); /* 1秒待つ */
}
TerminateTask(); /* 処理終了 */
}
|
最適な速度、比例ゲイン、微分ゲインは、コースやロボットによって異なります。
ただし、比例ゲインは、前章のプログラムよりも小さくしたほうが良いでしょう。
前章の比例制御に加え、微分制御を実装すると、安定したライントレースが出来るようになることがわかります。