5.プログラム構成
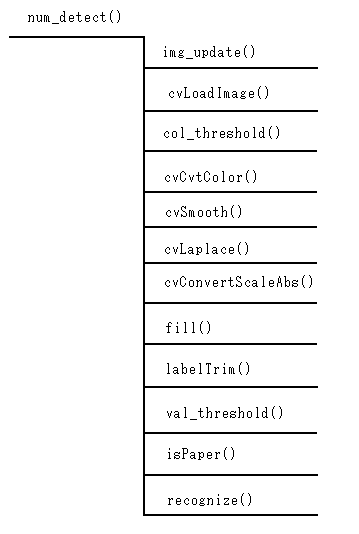
Fig. 1
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2009.3.11 | 杉山 | 鄭 | 初版 | ||
| フローチャート | ファイル名 | 関数名 |
|---|---|---|
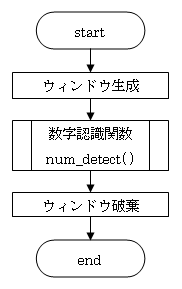
| メインルーチン | m_num_detect.c | main() |
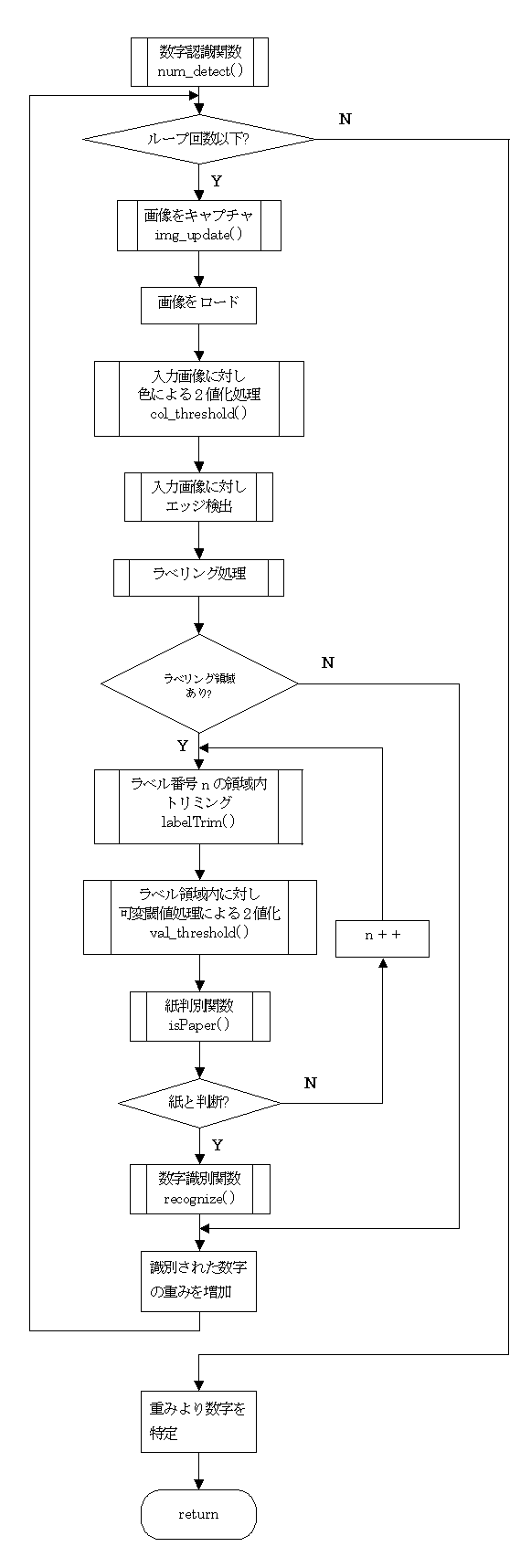
| 数字認識ルーチン | num_detect.c | num_detect() |
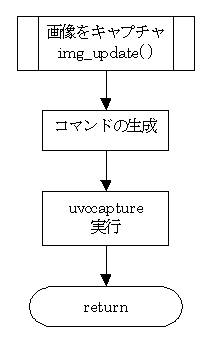
| 画像キャプチャルーチン | img_update.c | img_update() |
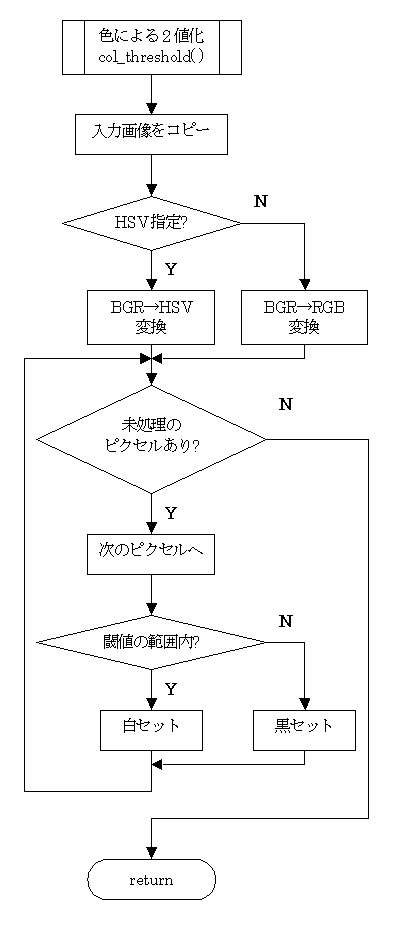
| 色による2値化処理ルーチン | col_threshold.c | col_threshold() |
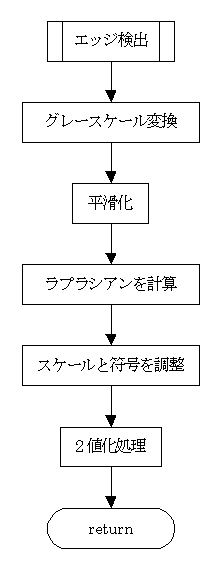
| エッジ検出ルーチン | num_detect.c | num_detect()※1 |
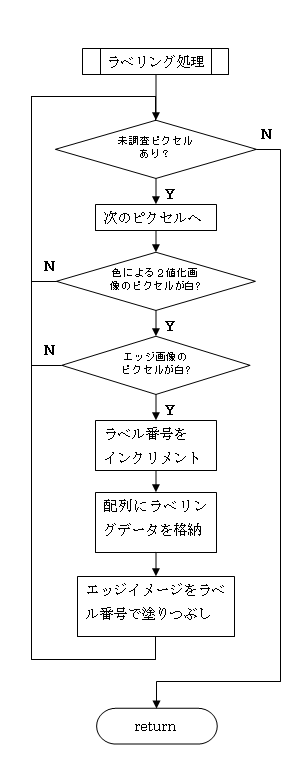
| ラベリングルーチン | num_detect.c | num_detect()※1 |
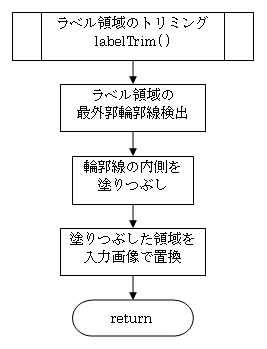
| ラベル領域のトリミングルーチン | num_detect.c | labelTrim() |
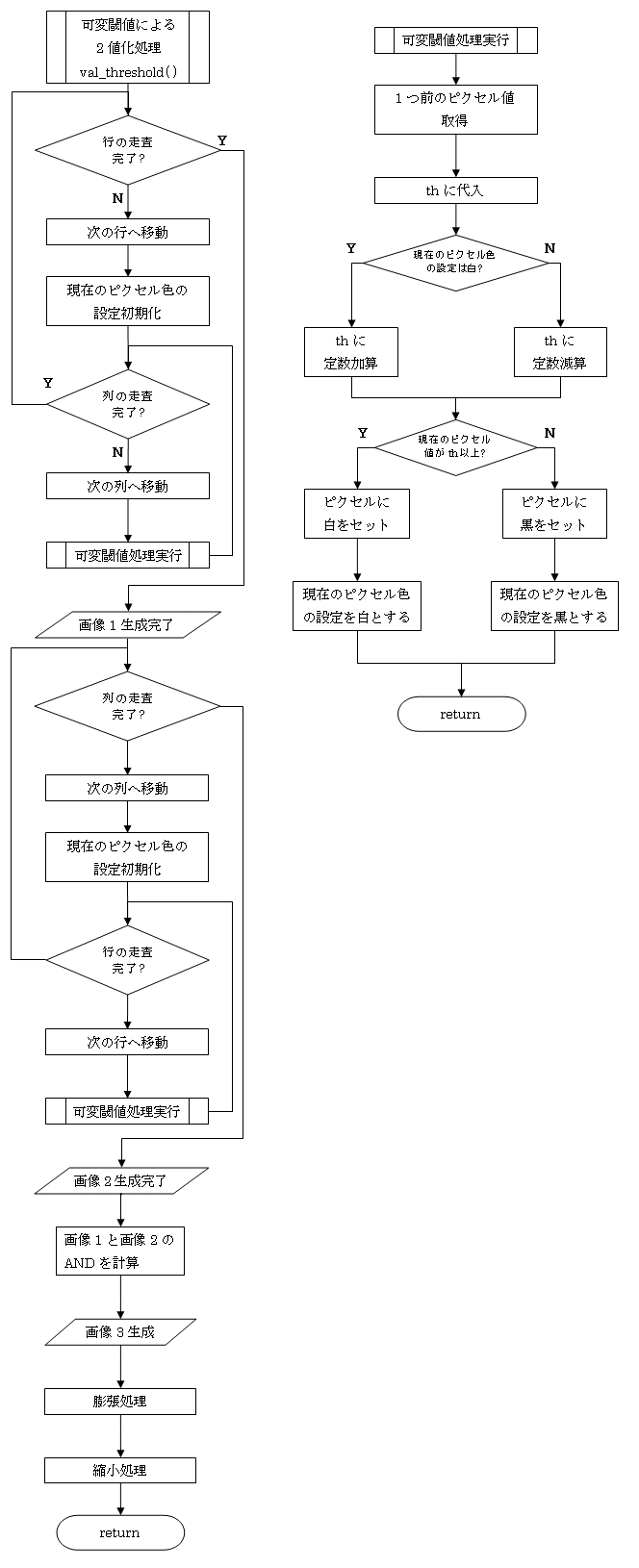
| 可変閾値処理ルーチン | val_threshold.c | val_threshold() |
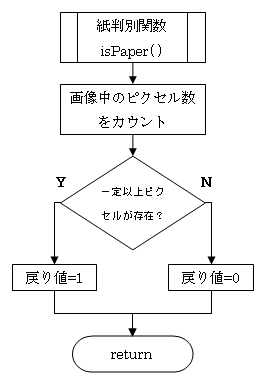
| 紙判別ルーチン | isPaper | isPaper() |
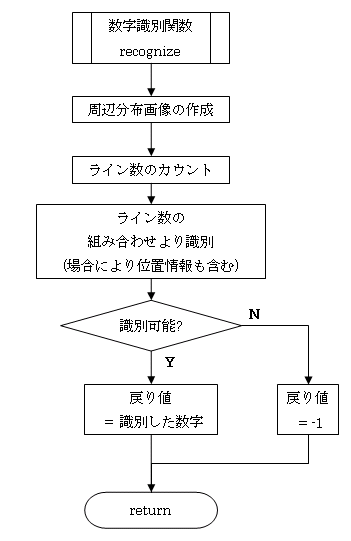
| 数字識別ルーチン | num_detect.c | recognize() |
| 関連文書 |
|---|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}