4.各モジュールの関係
青く示されているのが新規追加するモジュールである。黄色と青で示されているのが一部変更する標準モジュールである。
各モジュールの一覧を表.2、表.3で示し、図.1、図.2でモジュール構成図を示す。
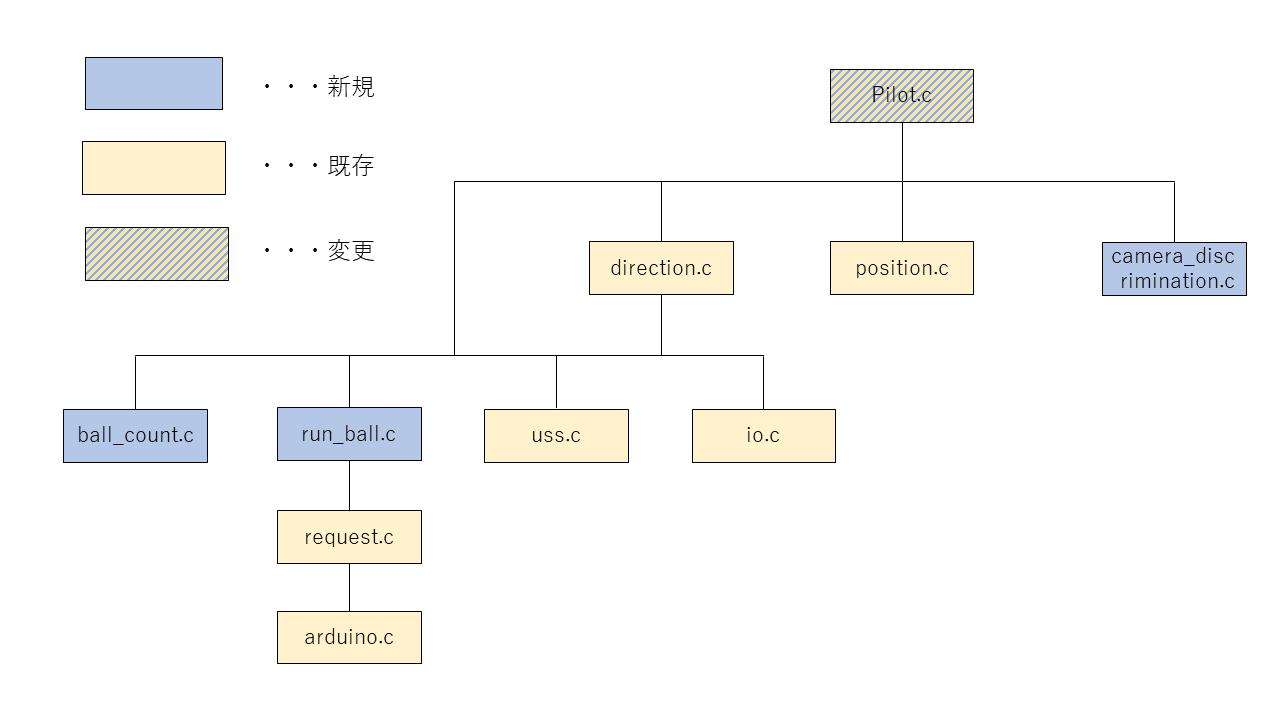
図.1 RaspberryPi モジュール構成図
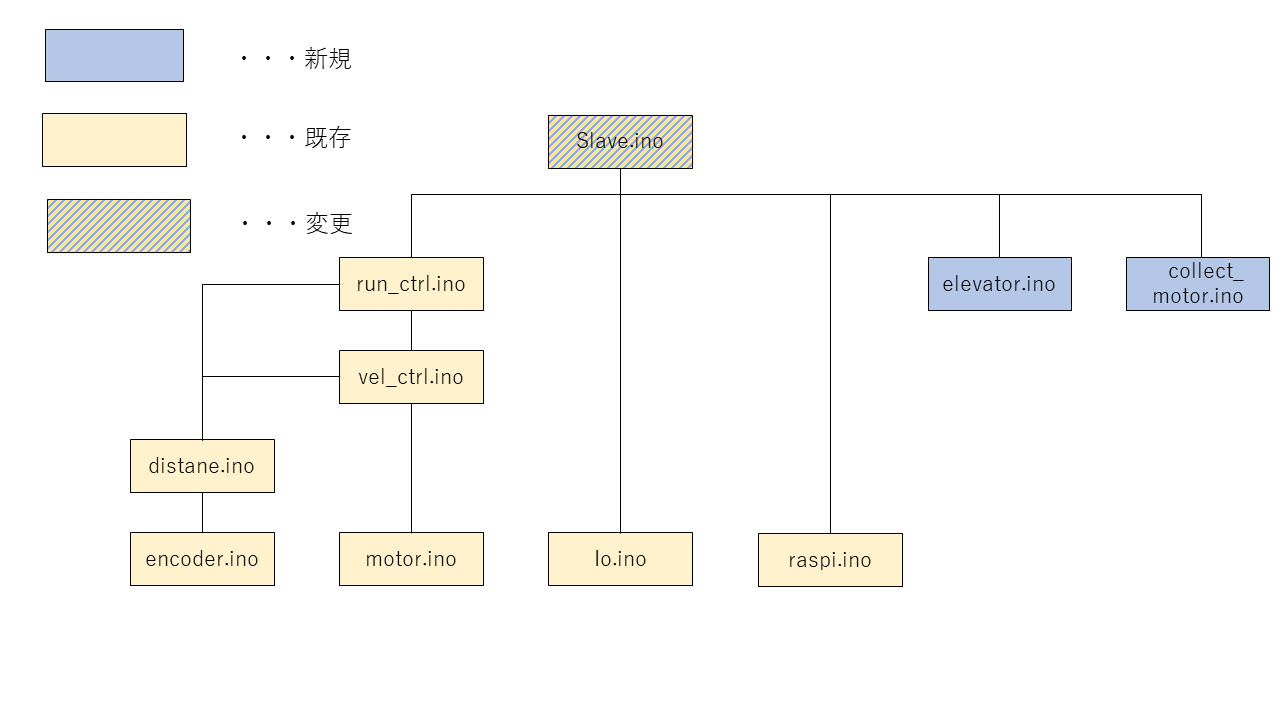
図.2 Arduino モジュール構成図
| モジュール名 | 概要 |
|---|---|
| pilot | 初期操作を行う |
| direction | 正対補正を行う |
| ball_count | 回収したボールの個数をカウントする |
| position | 自己座標の取得を行う |
| camera_discrimination | 画像認識を行う |
| run_ball | 移動機能と緊急停止を備えたモジュール |
| uss | 超音波センサの読み取りを行う |
| io | GPIOの読み取りを行う |
| request | Arduinoへの命令を行う |
| arduino | Arduinoとのシリアル通信を行う |
| モジュール名 | 概要 |
|---|---|
| slave | RaspberryPi との通信、走行制御を一定周期で行う |
| elevator | 昇降機のモータ制御を行う |
| run_ctrl | 走行制御を行う |
| io | 各種デバイスのピン設定と状態の取得を行う |
| raspi | Raspberry Piとシリアル通信を行う |
| vel_ctrl | 速度制御を行う |
| distance | 走行距離の取得をする |
| motor | モータを操作する |
| encoder | エンコーダの読み取りを行う |
| collect_motor | 回収用モータの制御を行う |
5.各パートへのリンク
以下に全体の基本設計書と各パートの基本設計書のリンクを示す。全体基本設計書
メカニクス基本設計書
エレクトロニクス基本設計書