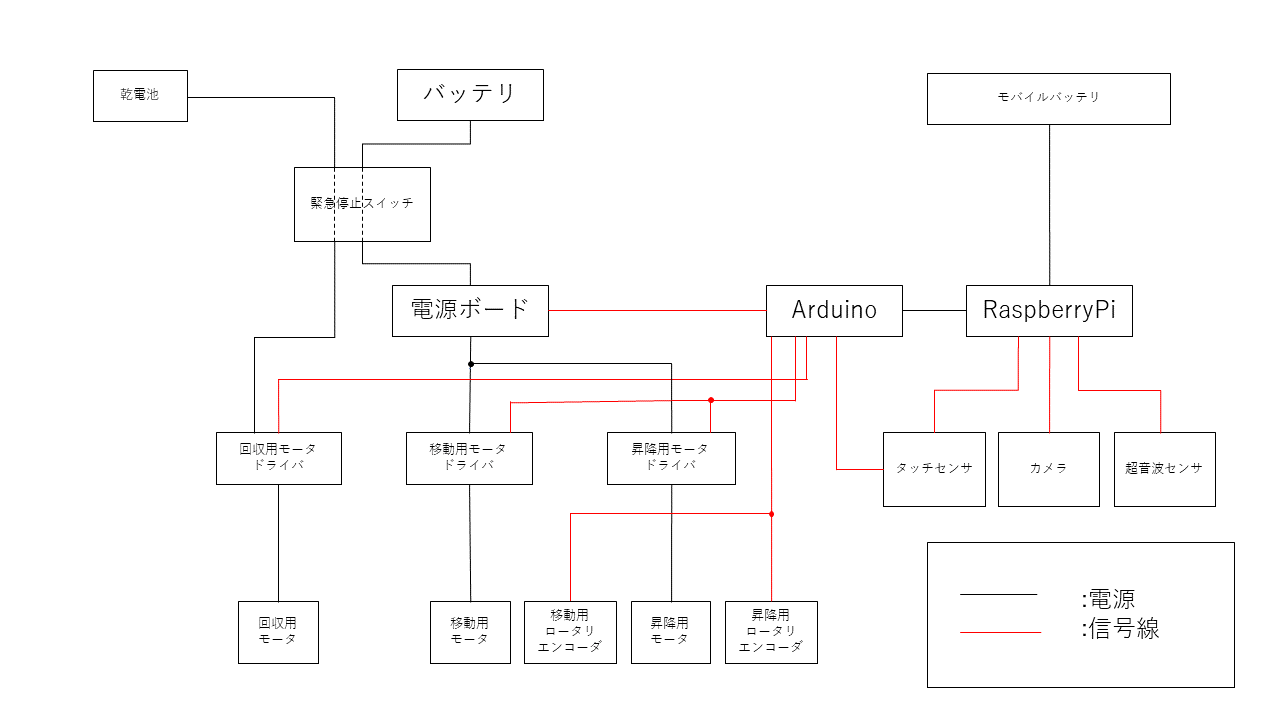
図1 基本設計図
| 名称 | MIRS2002 エレキ基本設計書 |
|---|---|
| 番号 | MIRS2002-DSGN-0006 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2020.10.22 | 小澤 和成 | 初版 | |
| A02 | 2020.10.23 | 小澤 和成 | 2版 |
| 供給元 | 利用箇所 |
|---|---|
| 模型用バッテリ | 電源ボードを介して、移動用モータと昇降用モータへ供給 |
| モバイルバッテリ | RaspberryPiとArduinoへUSBで供給 |
| 乾電池 | 回収用モータへ供給 |
| 操作部分 | 目的 | 動作 |
|---|---|---|
| 非常停止スイッチ | 緊急的にロボットの動作を停止させる | 乾電池と模型用バッテリからの出力を断つことにより、モータの動作を停止させる |
| 部分名称 | 目的 | 機能 | 通信方式 |
|---|---|---|---|
| タッチセンサ | ボールを回収したことを検知する | ボール接触したらRaspberryPiとArduinoに信号を送る | デジタルI/O |
| カメラ | 前方の映像を得る | 前方の画像データをRaspberryPiに送る | USB |
| 超音波センサ | 障害物を検知する | 前方にある物体との距離をRaspberryPiに送る | I2C |