| 名称 | MIRS1903 エレクトロニクス詳細設計書 |
|---|---|
| 番号 | MIRS1903-ELEC-0002 |
| 版数 | 最終更新日 | 作成者 | 承認者 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2019.11.29 | 高久直也・高田晃佑 | 初版 | |
| A02 | 2019.12.13 | 高久直也・高田晃佑 | 第2版 | |
| A03 | 2019.12.19 | 高久直也・高田晃佑 | 第3版 |
本ドキュメントはMIRS1903のエレクトロニクス詳細設計書である。
作成箇所をTable.1に示す。
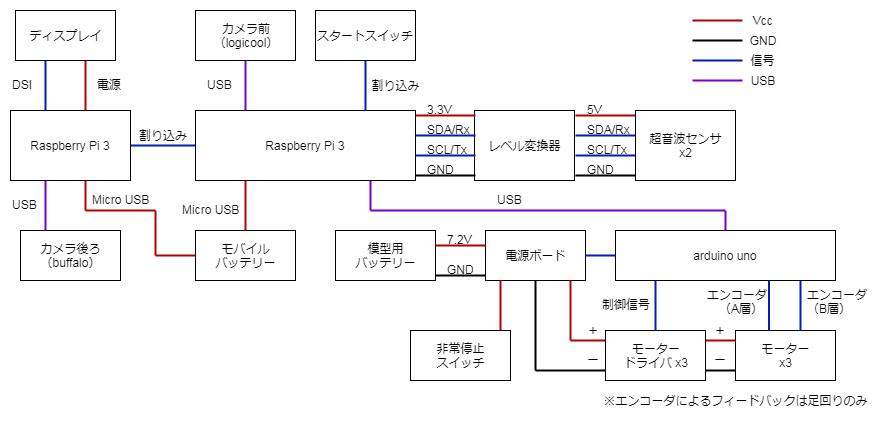
また、使用するモーターのエンコーダは使用しない。
| 作成箇所名 | 機能 | 標準機からの変更箇所 |
|---|---|---|
| 電源ボード | 駆動用モーターの制御 | モーター用の接続部の増設 |
| スタートスイッチ | プログラムの開始 | |
| 非常停止ボタン | 緊急時の非常停止 | |
| ディスプレイ | 掃除範囲の表示 | |
| モーター | マーカーの設置 | |
| カメラ | 床の凹凸検知 |
システム構成図をfig.1に示す。
今回使用する回路の基本回路図を以下に示す。
電源ボードの回路図をFig.2に示す。
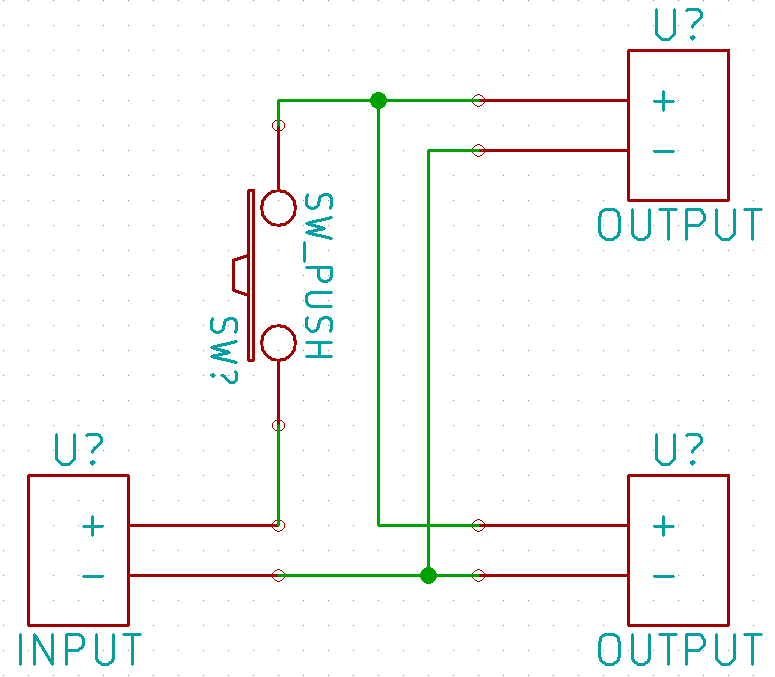
B接点である非常停止ボタン(作成箇所名:SW_PUSH)を各モーターと駆動用バッテリーとの間に挟み、非常用にはそのスイッチを押すことでモーターの動作を停止させる。
MOTORDRIVER_INPUTと電源ボードとの接続部はターミナルブロックに端子が入りにくくなったら、ターミナルブロックを増設し接続する。
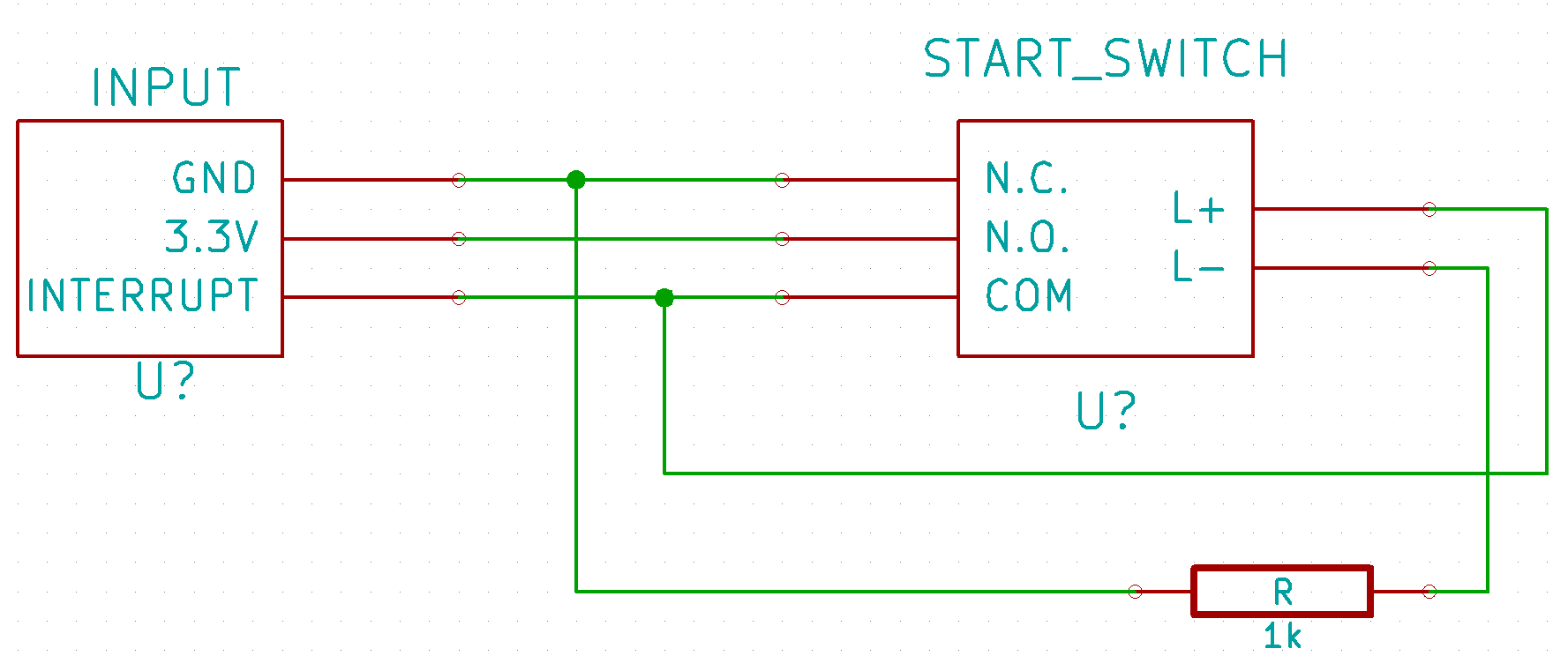
スタートスイッチの回路図をFig.3に示す。
このスタートスイッチはRaspberry Piのシールドに信号ケーブルで接続する。
Arduinoシールドの回路図をFig.4に、ピンの接続デバイスをTable.2に示す。
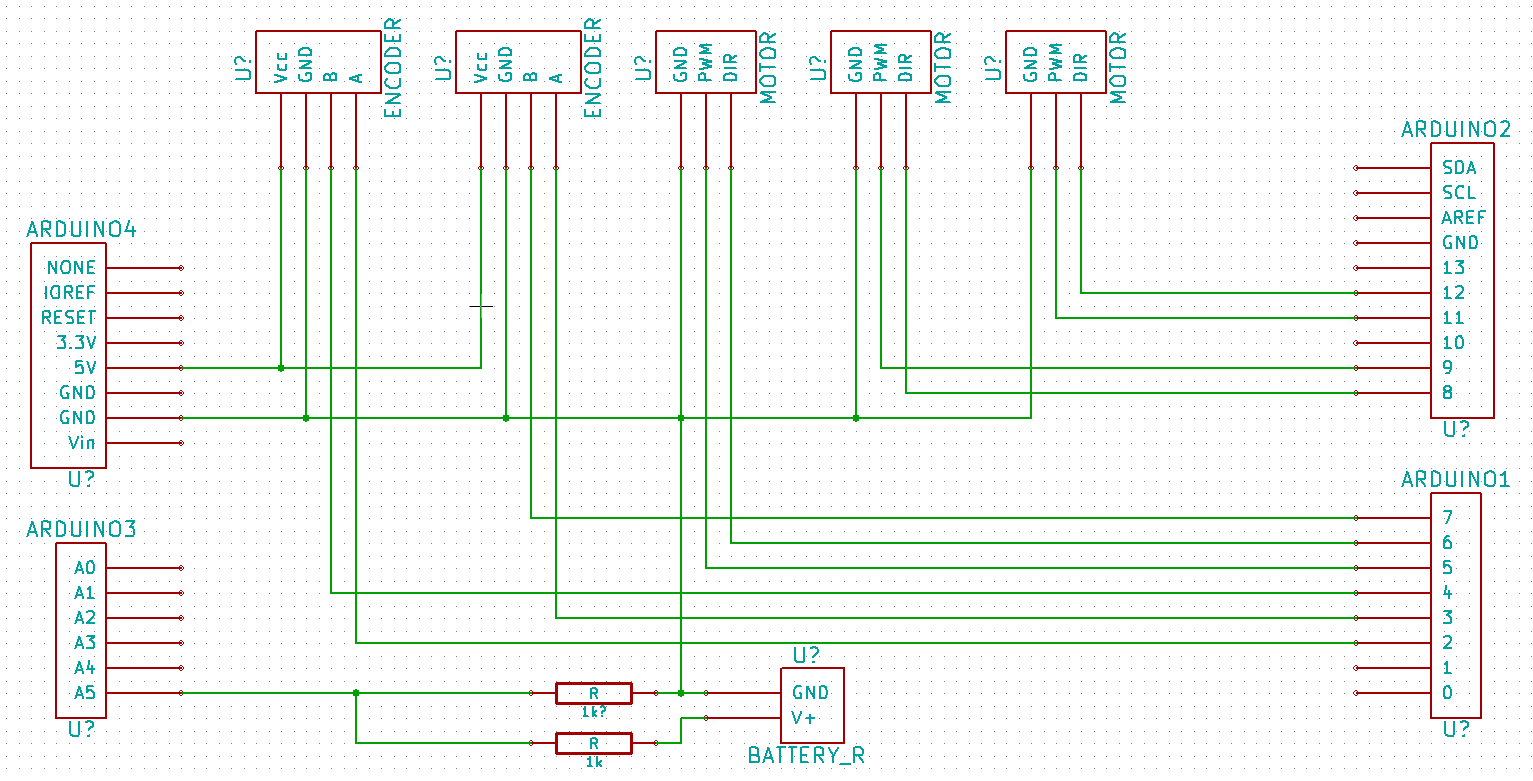
BATTERY_Rには1k[Ω]の抵抗を接続する。
| ピン番 | 接続デバイス | IN/OUT |
|---|---|---|
| 2 | エンコーダ(左)A相 | IN |
| 3 | エンコーダ(右)A相 | IN |
| 4 | エンコーダ(左)B相 | IN |
| 5 | モータードライバ(マーカー機構)PWM | OUT |
| 6 | モータードライバ(マーカー機構)DIR | OUT |
| 7 | エンコーダ(右)B相 | IN |
| 8 | モータードライバ(右)DIR | OUT |
| 9 | モータードライバ(右)PWM | OUT |
| 11 | モータードライバ(左)PWM | OUT |
| 12 | モータードライバ(左)DIR | OUT |
| A5(19) | バッテリー電圧 | IN |
Raspberry Piシールドの回路図をFig.5に、ピンの接続デバイスをTable.3に示す。
また、2台目のRaspberry Piにはシールドをつけないため、1台の回路図、接続デバイスを示す。
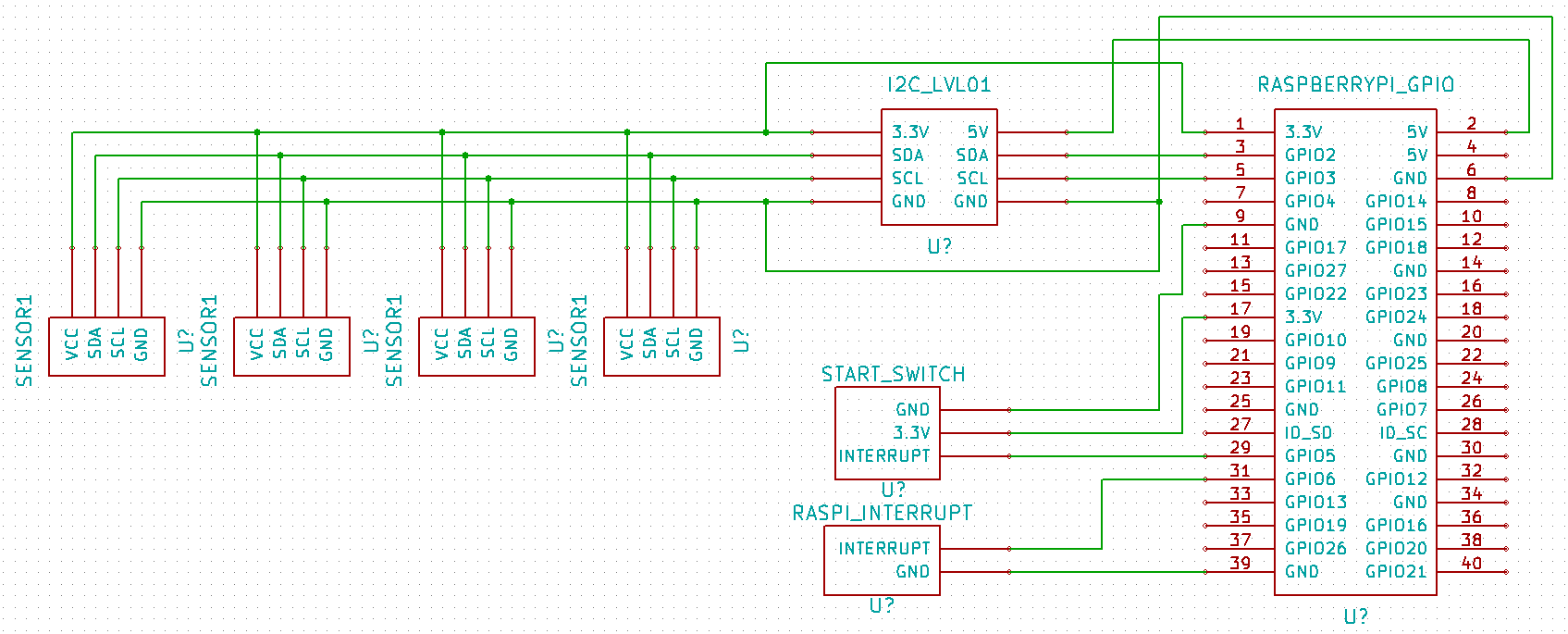
| ピン番号 | 接続デバイス | IN/OUT |
|---|---|---|
| GPIO2 | I2Cレベル変換機(超音波センサ)SDA | OUT |
| GPIO3 | I2Cレベル変換機(超音波センサ)SCL | OUT |
| GPIO5 | スタートスイッチ | IN(割り込み) |
| GPIO6 | Raspberry Pi(2台目) | OUT |
各パートのドキュメントのリンクを以下に示す。