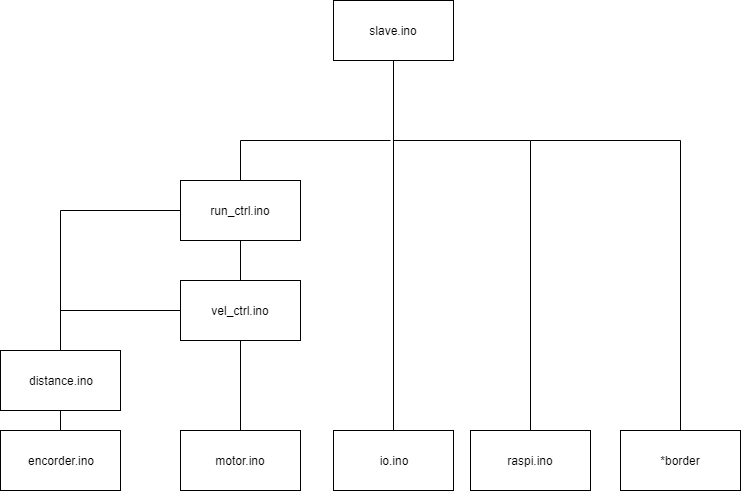
Fig.2 Arduinoモジュール構成図
| 名称 | MIRS1901 詳細設計書(ソフトウェア) |
|---|---|
| 番号 | MIRS1901-SOFT-0001 |
| 版数 | 最終更新日 | 作成者 | 承認者 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2020.02.10 | 佐藤 | 第2版 |
| 機能 | 内容 |
|---|---|
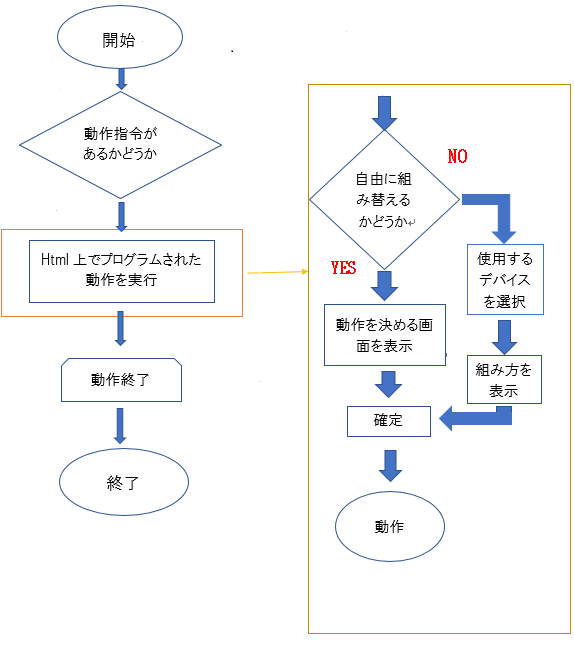
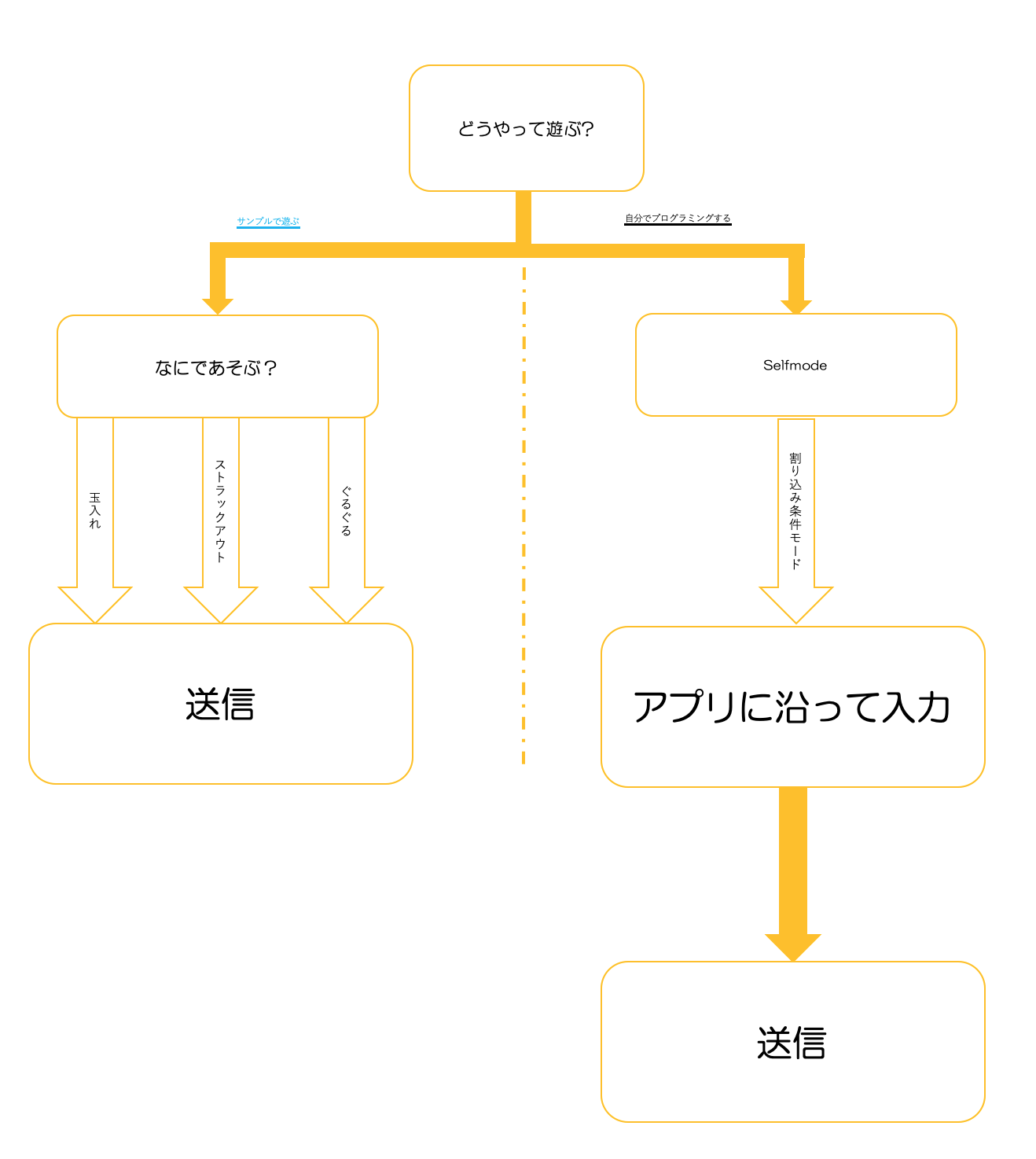
| 走行機能 | webアプリで入力されたプログラムをもとに動作する。 基本動作指令(逐次処理)(例:10秒なにもしない) 割り込み条件指定(例:もし何かが当たったならば、10秒前に進む) |
| webアプリによるプログラミング機能 | 基本動作指令(逐次処理)(例:10秒なにもしない) 割り込み条件指定(例:もし何かが当たったならば、10秒前に進む) |
| led機能 | プログラムで指定されると機能する。(LEDパネル) |
| 感圧機能 | Arduinoへ命令を送る |
| 超音波センサ | mirs本体についている。プログラムで指定されると機能する。 |
| モジュール名 | 概要 |
|---|---|
| motor | モーターのPWM制御 |
| encorder | ロータリーエンコーダー値のカウント |
| distance | エンコーダー値を走行距離に変換 |
| vel_ctrl | モーターの速度PI制御 |
| run_ctrl | 機体の直進、回転のP制御 |
| io | ioピンのデータの取得 |
| raspi | RaspberryPiとの通信 |
| slave | RaspberryPiとの命令で動作 |
| *border | 境界線の検知 |
| テスト名 | テスト内容 |
|---|---|
| アプリテスト | アプリでプログラムすることができ、 CSVに変換されてmirsに送信されるか |
| CSV受け取りテスト (app→mirs) |
mirsがcsvを受けとることができるか |
| 走行テスト | 送信されたプログラム(csv)通りに走行できるか |
| 外部入力テスト | 感圧装置が機能するか、超音波が機能するか |
| 外部出力テスト | LEDが発光するかどうか(ストラックアウト時ボールが当たった際発光する) |