| ボード | 目的 | 備考 |
|---|---|---|
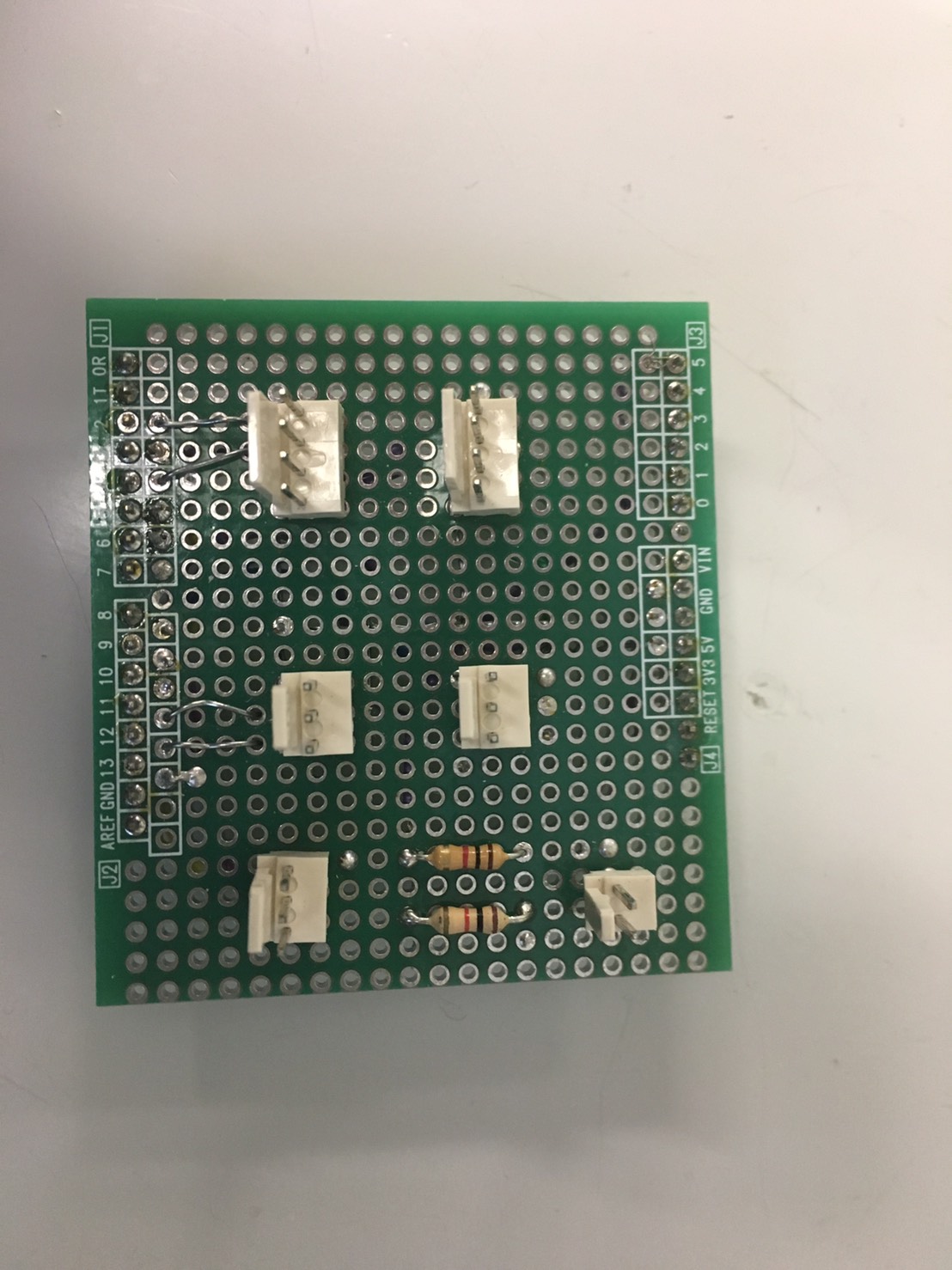
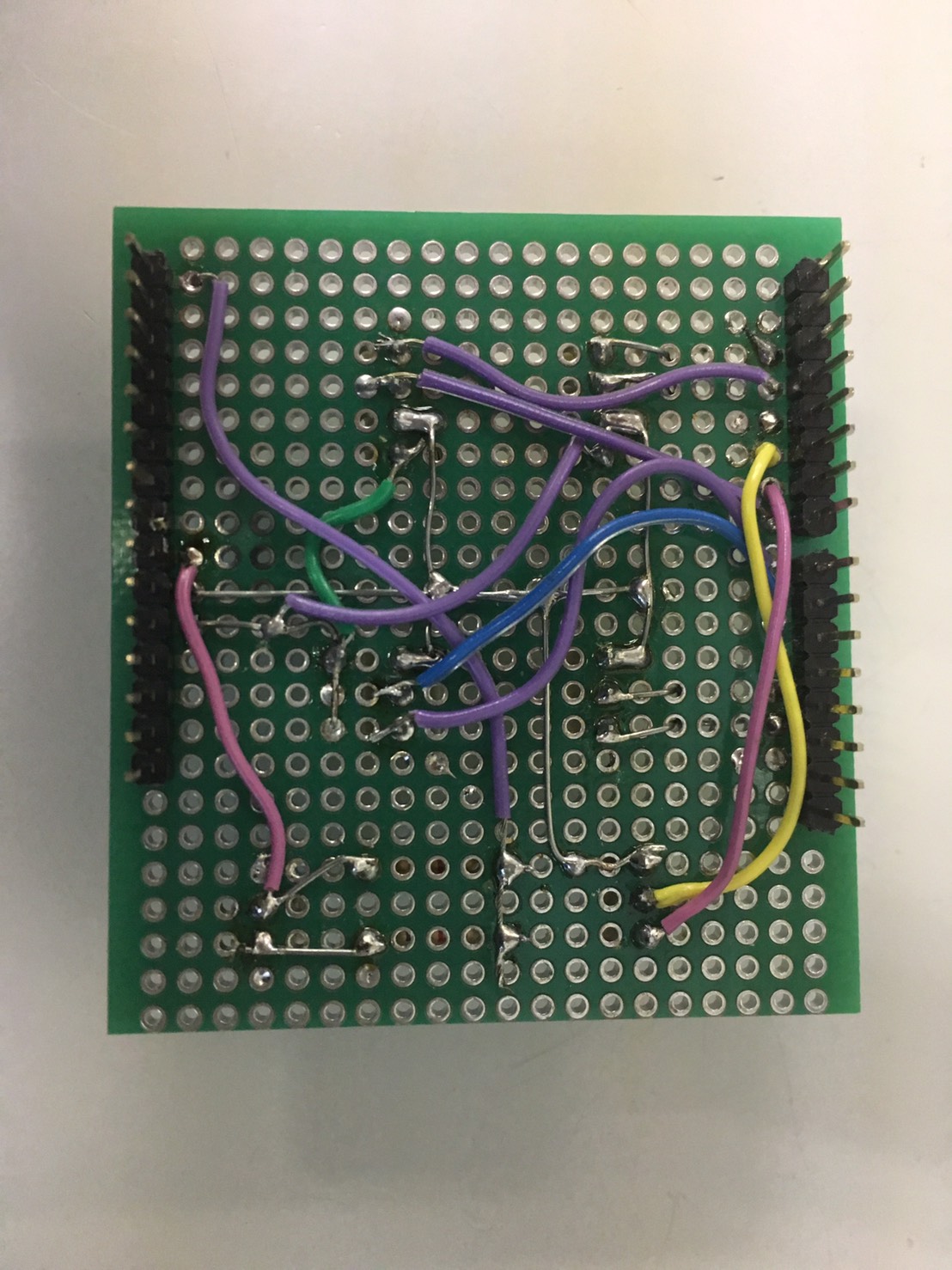
| Arduino UNO | センサ入力検知・駆動系の制御のため | ユニバーサル基盤に各種センサモジュール用ソケットを追加 |
| Raspberry Pi | センサ信号処理等の機体全体制御を行う | ユニバーサル基盤にスピーカーモジュールを追加 |
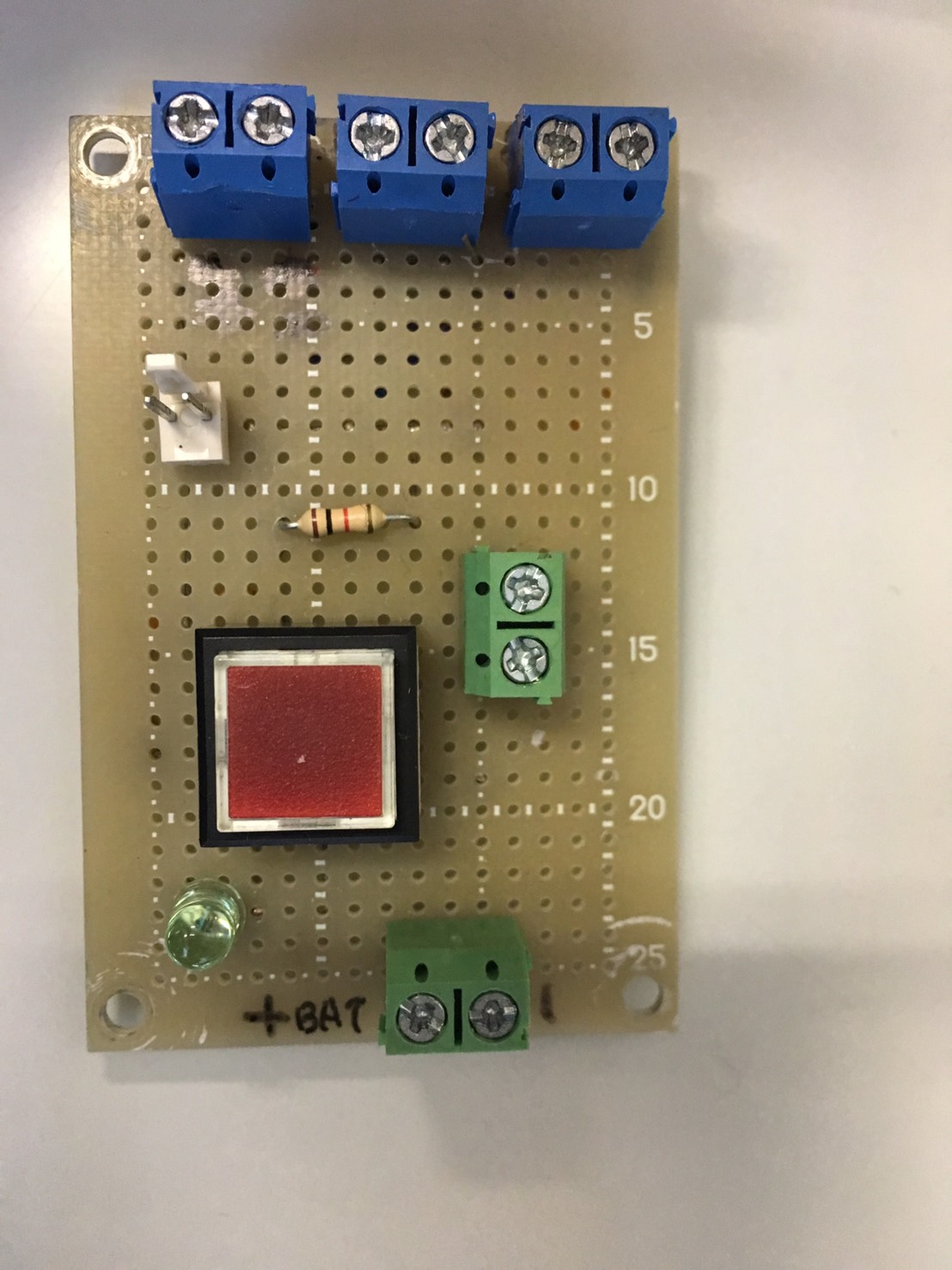
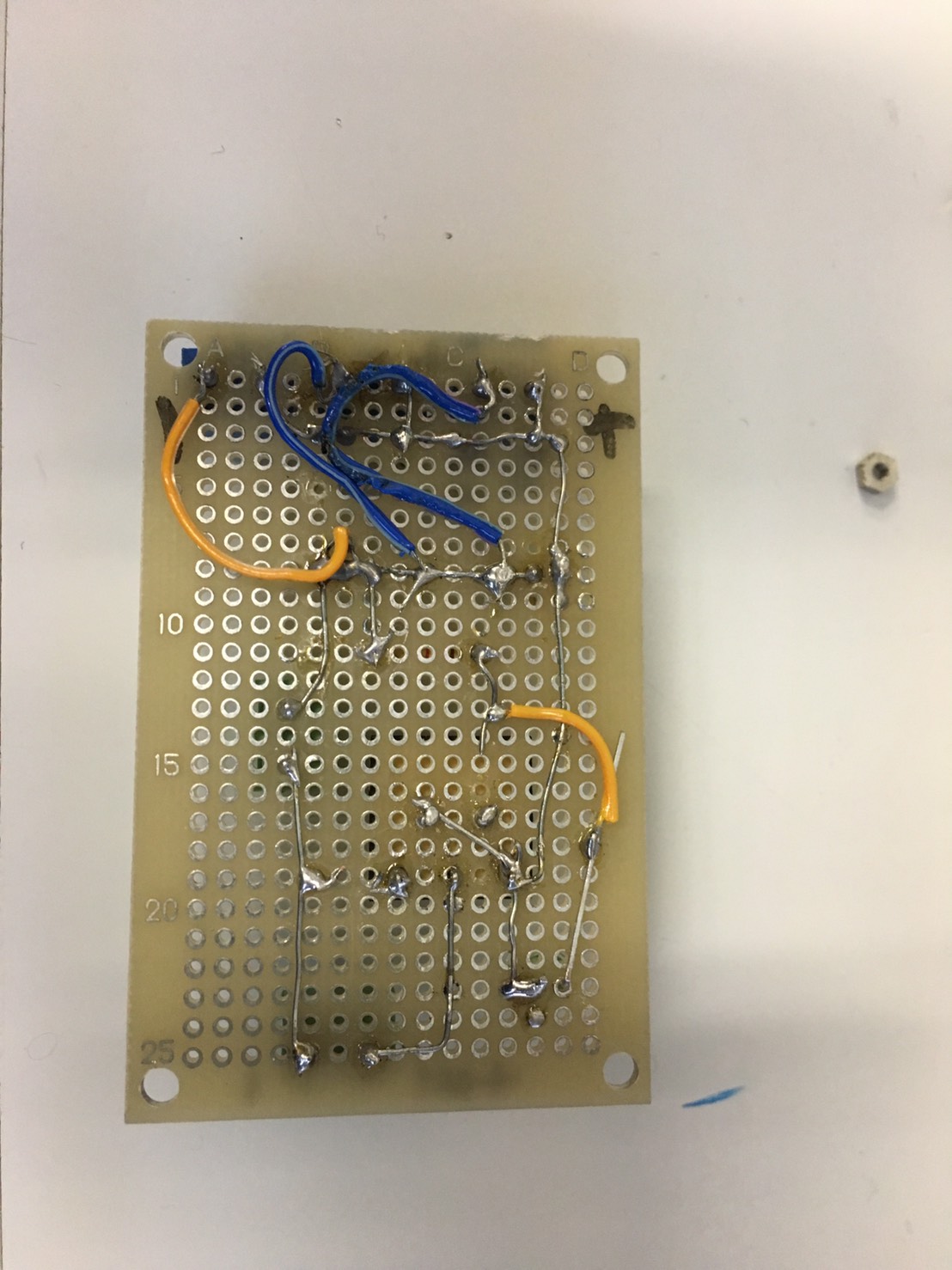
| 電源基盤 | 駆動系への電力供給のため | 首伸縮用モーターの電源の確保・緊急停止ボタンの追加 |
| 名称 | MIRS1805エレクトロニクス開発報告書 |
|---|---|
| 番号 | MIRS1805-ELEC-0002b |
最終更新日:2019.02.08
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| B01 | 2019.02.08 | 佐々木謙人 | 初版 |