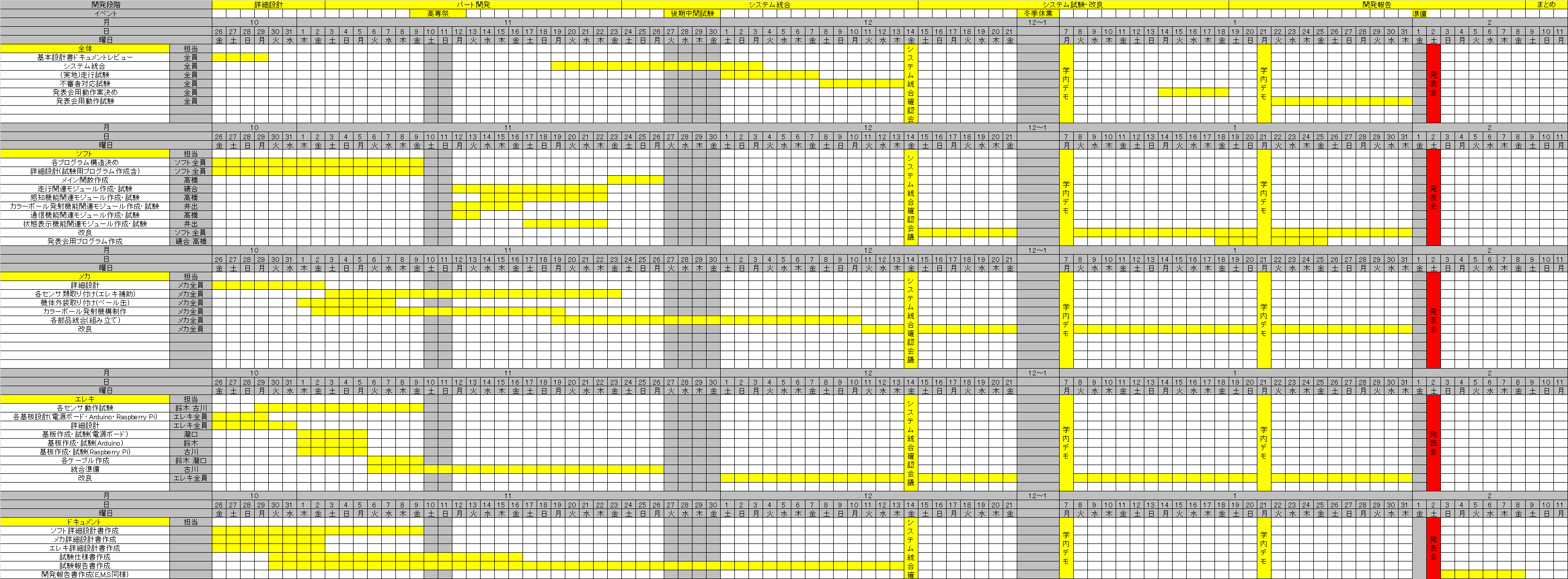
3.開発スケジュール
| 名称 | MIRS1803 基本設計書 |
|---|---|
| 番号 | MIRS1803-DSGN-0002 |
| 版数 | 最終更新日 | 作成者 | 承認者 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2018.10.26 | 瀧口周 | 初版 | |
| A02 | 2018.11.05 | 鈴木慧人 瀧口周 | 大沼先生 | 第2版 |
| 開発項目 | メンバー |
|---|---|
| メカニクス | 今泉肇 深谷祥平 |
| エレクトロニクス | 鈴木慧人 瀧口周 古川陽太 |
| ソフトウェア | 礒合優汰 井出知里 高橋凌 |
| 名称 | メーカー | 型番 | 数量 | 価格[円] | 選定理由 | 備考 | |
|---|---|---|---|---|---|---|---|
| 光センサ付赤外線LEDリングライト 850nm FRS5CS | 秋月電子通商 | 通販コード | M-09589 | 1個 | 780 | 暗くなると自動で点灯するため | |
| コネクタ付コード2P (E) (赤白) | C-05683 | 1本 | 30 | 赤外線LEDに取り付け可能なため | |||
| 焦電型赤外線センサーモジュール (焦電人感センサ) | M-09627 | 4個 | 1600 | 類似品と比べて安価で,5[m]先の人を感知可能なため | |||
| 最大30[V]出力 昇圧型スイッチング電源モジュール NJW4131使用 | K-07406 | 1個 | 800 | 赤外線LEDを駆動するために,5[V]~12[V]の昇圧が必要でありそれが実現可能なため | |||
| 電子ブザー 14mm PBO4-SE12HPR (ブザー①) |
P-04497 | 1個 | 100 | 発信回路内臓で,Arduinoに繋げばすぐに起動でき,85[dB]出すことができるため | |||
| 電子ブザー 12mm UDB-05LFPN (ブザー②) |
P-09704 | 1個 | 80 | ||||
| Raspberry Pi PiNoirCameraV2(ラズベリーパイ赤外線カメラモジュールV2) | M-10519 | 1個 | 4400 | Raspberry Piに互換性がある暗闇でも撮影可能な赤外線カメラで,5[m]離れた場所を縦4[m]の範囲で写すことができるため | |||
| T型コネクタ オス 赤 | C-13420 | 4本 | 50 | 配線の向きを間違えないようにするため | |||
| T型コネクタ メス 赤 | C-13434 | 4本 | 50 | ||||
| USBケーブル USB2.0 Aオス-マイクロBオス 1.5m | C-07607 | 1本 | 120 | Raspberry Piと電源の距離があるので,それを繋げられるようにするため | |||
| 3軸加速度センサモジュール KXSC7-2050 | K-07243 | 1個 | 500 | -- | |||
| 3軸ディジタルコンパスモジュール HMC5883L | Strawberry Linux | 注文番号 | 12105 | 1個 | 758 | 検出レンジ,出力レートを十分な範囲でソフトウェア選択でき,分解能12bitで細かく角度を測れるため(測定した地磁気を元に計算してもとめる) | |
| SRF02 超音波距離センサー I2C/TTLレベルUARTインターフェイス | ELEFINE | 型番 | SRF02 | 2個 | 5348 | すでに標準機で使用しているため動作が保障されており,障害物回避のために増やす必要があるため | |
| Raspberry Pi カメラ モジュール リプレースメント ケーブル Pi Camera Board Replacement Cable (長さ 610mm) | Amazon | -- | -- | 1本 | 1210 | 使用する赤外線カメラに対応しており,機体の高さを出すために延長する必要があるため | |
| SODIAL(R) Ui 600V Ith 10A スイッチ非常停止用のきのこ押しボタン | 1個 | 162 | -- | ||||
| フルカラーシリアルLEDテープ(1m) | SWITCHSCIENCE | コード番号 | SSCI-013994 | 1本 | 2970 | 様々な色を点灯することができるため | |
| ArduinoMega用プロトシールド基板 R3 | ARDUINO-A000080 | 1個 | 600 | -- | |||
| アルミアングルAL 20×20×300 厚み2mm | monotaro | 注文コード | 40356041 | 1個 | 179 | アルミで加工も容易で,同寸法のアングル材の中でもっとも安価なため | |
| 塩ビ板 450×600×0.5 | 35767663 | 1個 | 599 | 簡単に曲面を作ることができ,加工も簡単なため | |||
| ポリペンコアセタール(POM)丸棒 POM-BC(黒) φ15×1000 | 38805776 | 1個 | 389 | アルミ丸棒よりも軽い素材であるため | |||
| 多用途18Lペール缶 | 70116348 | 2個 | 1318 | 赤外線カメラ,人感センサの高さを1mに設定するのに,丸棒やパイプ等を使用すると,予算がかかり,別に外装も作らなければならないから | |||
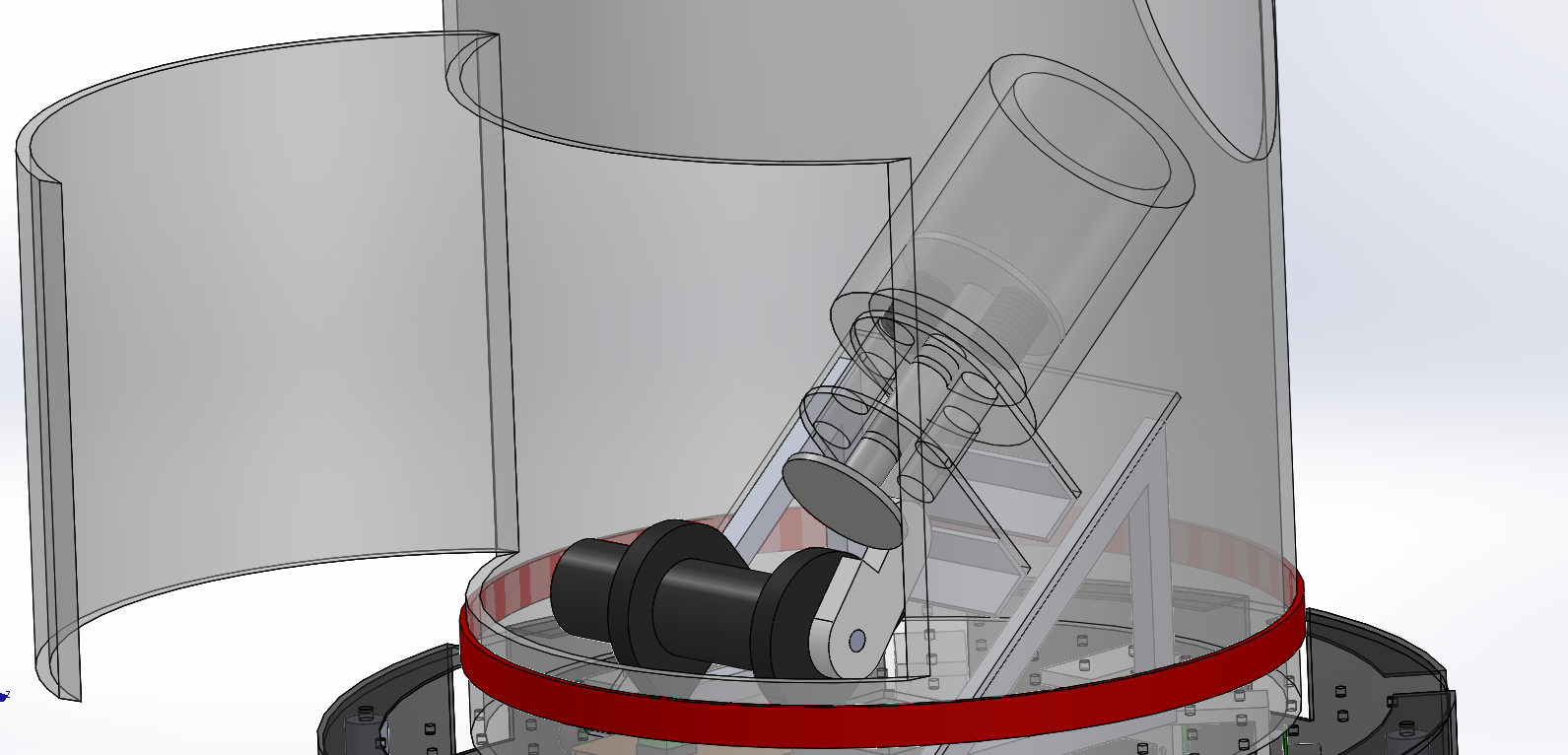
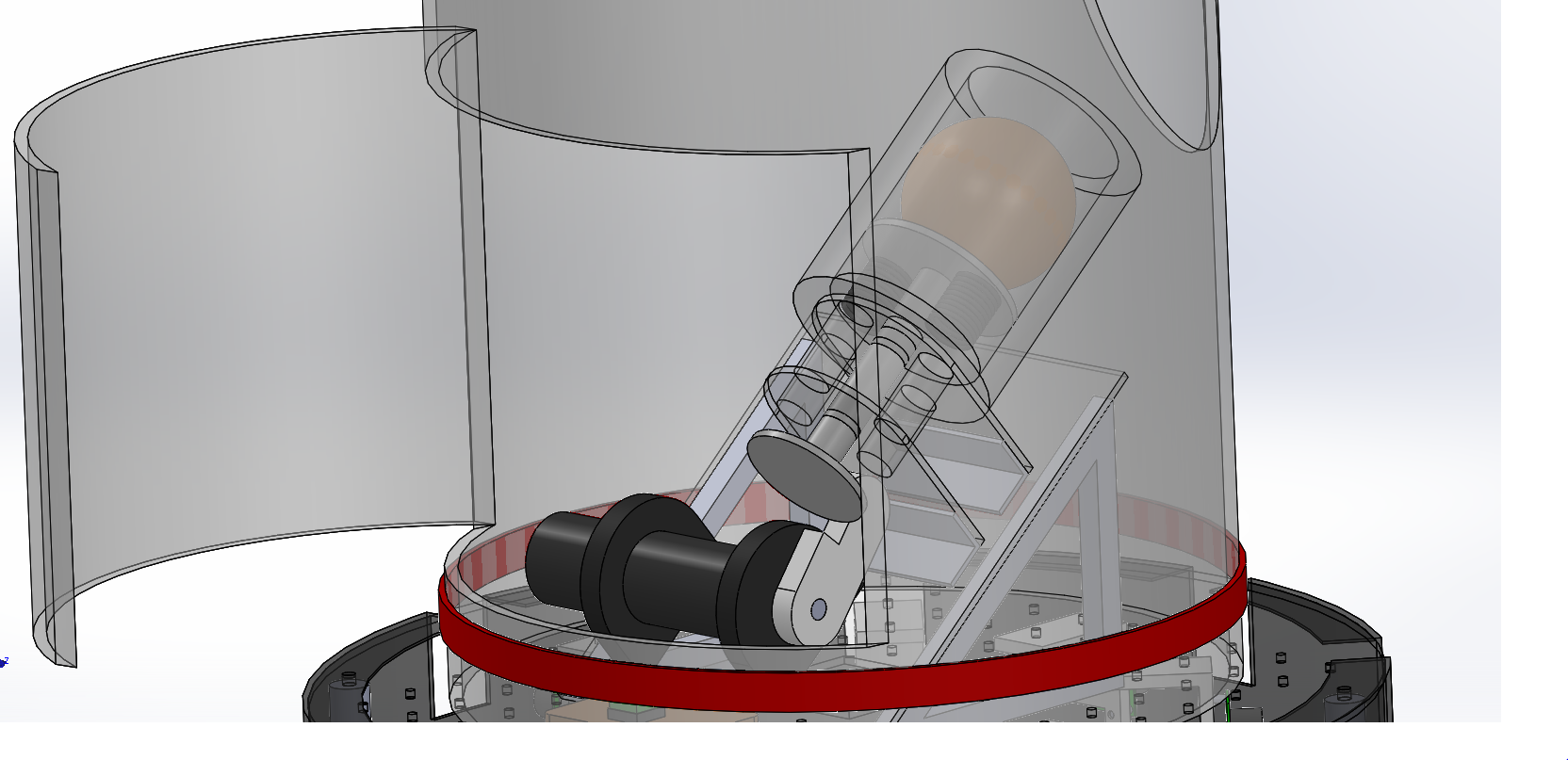
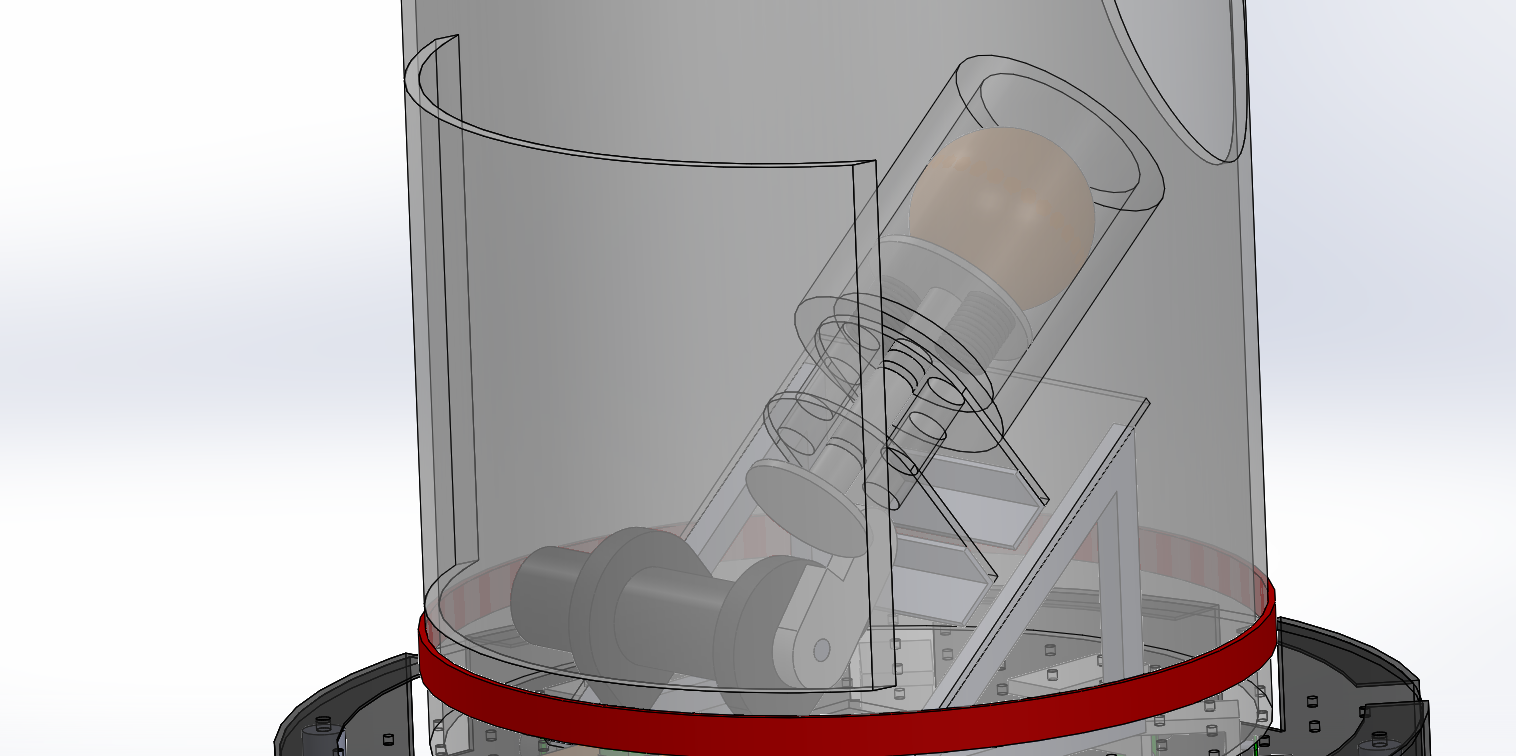
| 圧縮コイルバネ AP(ピアノ線) φ18×50*5 | 07306223 | 1個 | 899 | 事前に理論計算を行い,ばねの個数によって飛距離を1.7~8.5mまで変更できるようにしたため | |||
| アルミ平板 厚み3mm | ラボ在庫品 | -- | -- | 1個 | -- | -- | |
| アルミ丸棒 φ15 | ラボ在庫品 | -- | -- | 1個 | -- | -- | |
| 合計金額[円] | 22740 | ||||||
| 予備費(予算との差額)[円] | 7260 | ||||||
| 超音波センサ | 赤外線カメラ | 人感センサ | |
|---|---|---|---|
| 取り付け位置・方向・角度 | 機体中段・6方向(機体前後左右,前方斜め)・水平 | 機体上段・機体前方・水平方向から10[°]上向き | 機体上段・4方向(機体前後左右) |
| 使用個数 | 6 | 1 | 4 |
| 感知可能範囲 | 0.2~2.5[m] (センサ正面の物体に対する実測値)[*2] |
5[m]先,縦4[m]の可視範囲 | 7[m]・120[°] |
| 画素数 | - | 8M画素 | - |
| ブザー① | ブザー② | - | |
| 音量 | 85[dB] | 83[dB] | - |
| 周波数 | 4000±500[Hz] | 2300±400[Hz] | - |
| 機体総重量 | 9.55[kg] |
|---|---|
| 機体全高 | 870[mm] |
| 機体幅 | 400[mm] |
| 走行速度 | 0.5[m/s] |
| 不審者感知頻度 | 10[m]毎 |
| カラーボール飛距離 | 2.001~8.847[m][*3] |
| カラーボール最高到達点 | 0.778~2.480[m][*3] |
| 画像アップロードおよび連絡方式 | 学内Wi-Fiを用いてslackへアップする |
| テープLED点灯色と状態 | 警戒中:赤色に点灯 カラーボール発射前:赤色に点滅 駆動用バッテリー基準値以下:黄色に点灯 機体点灯:緑色に点灯 |
| ブザー鳴動と状態 | 警戒中:ブザー①のみ鳴動 カラーボール発射前:ブザー①,ブザー②交互に鳴動 |