MIRS1802 管理台帳へ戻る
| 名称 |
MIRS1802 エレクトロニクス 詳細設計書 |
| 番号 |
MIRS1802-ELEC-0001a
|
最終更新日:2019.1.3
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2019.1.3 |
大森 |
|
第1版 |
ドキュメント内目次
1.はじめに
本ドキュメントはMIRS1802のエレクトロニク詳細設計書について示したものである。
2.作成箇所
作成箇所を以下に示す。
Table.1 作成箇所
| モジュール |
品名 |
機能 |
変更箇所 |
| RaspberryPiシールド |
|
センサ等の接続 |
各センサの追加 |
| Arduinoシールド |
|
センサ等の接続 |
各センサの追加 |
| 電源ボード |
|
モーター用電源の制御 |
非常停止用スイッチの追加 |
| アンプ |
K-05965 |
スピーカーから出力するの音の増幅 |
|
| 磁気センサ |
HMC5883L |
機体が向いている方向を検知 |
|
| 赤外線センサ |
L-51ROPT1D1 OSI3CA5111A |
ごみ箱内のごみの量を検知 |
|
| 超音波センサ |
SRF02 |
障害物の検知 |
|
| タッチセンサ |
SS-5GL |
人とぶつかったとき緊急停止 |
|
| 光センサ |
SS-5GL |
ごみ箱の開閉を検知 |
|
3.システム構成
システム構成をfig1に示す。
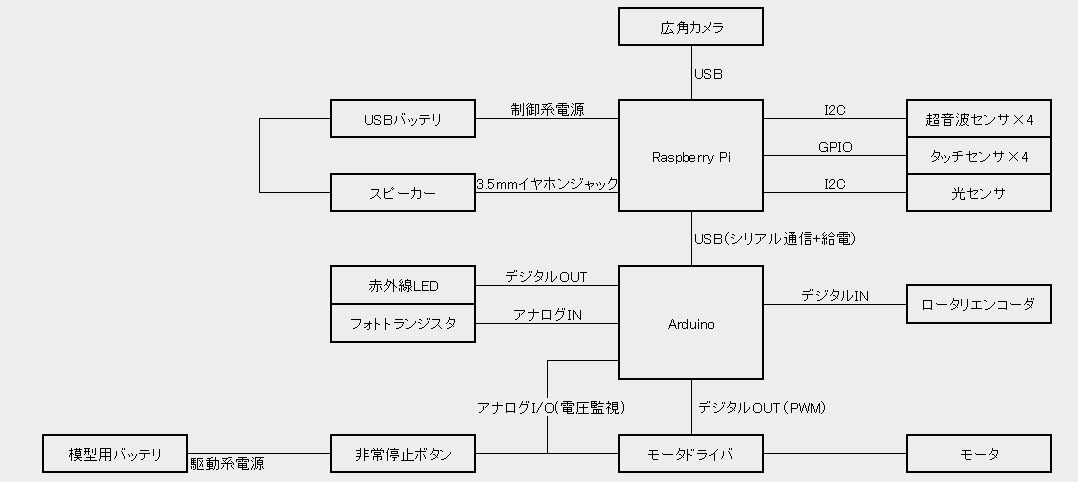
fig1 基本接続図
4.各回路基板図
今回使用する基盤回路図を以下に示す。
・電源ボード
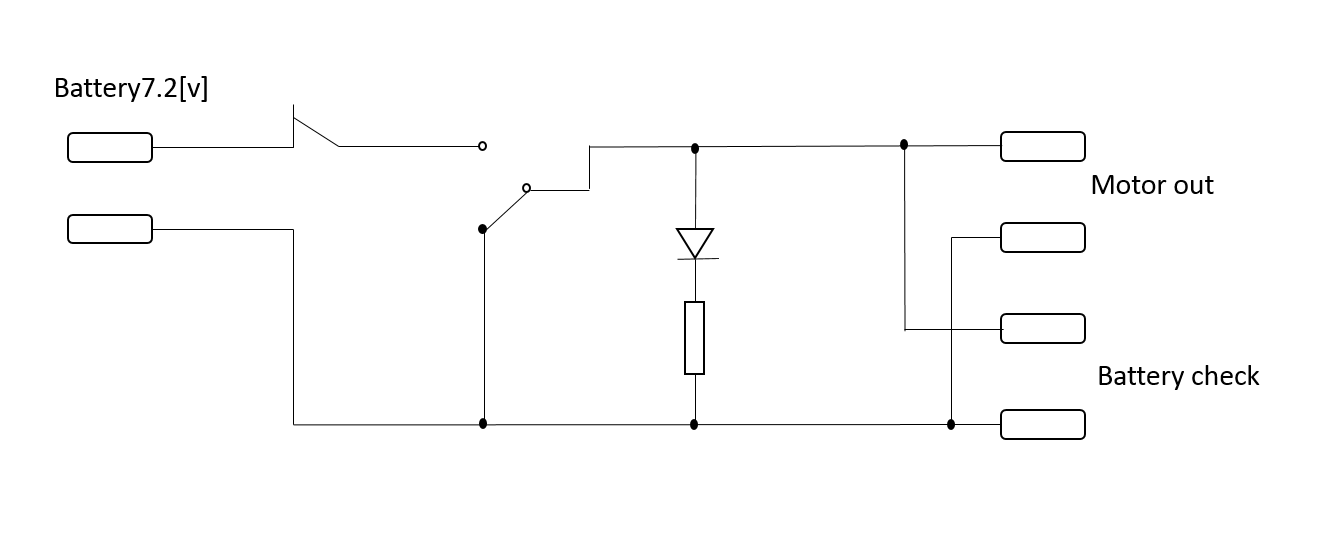
fig2 電源ボード
非常停止スイッチのためにターミナルブロックを増設した。
・Arduinoシールド
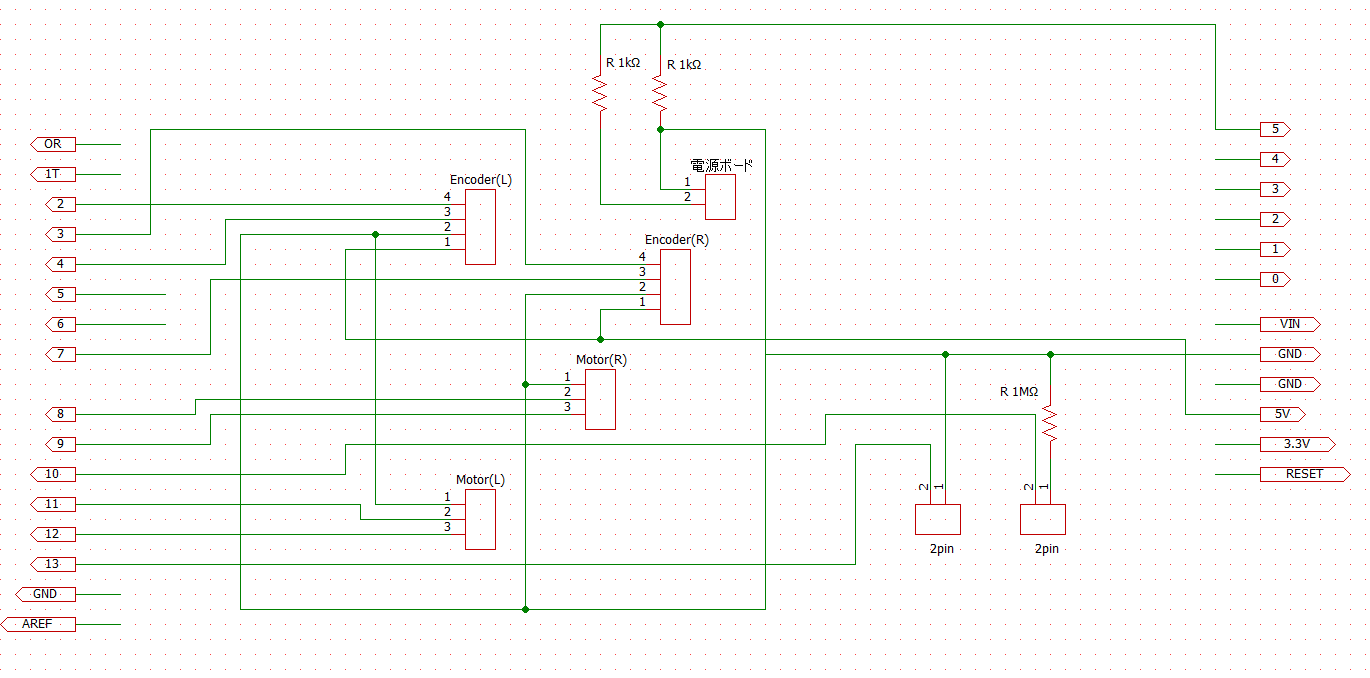
fig3 Arduino
Table.2 ピン配置
| ピン番号 |
接続デバイス |
IN/OUT |
| D2 |
エンコーダ(左)A相 |
IN |
| D3 |
エンコーダ(右)A相 |
IN |
| D4 |
エンコーダ(左)B相 |
IN |
| D7 |
エンコーダ(右)B相 |
IN |
| D8 |
モータードライバ(右)Direction |
OUT |
| D9 |
モータードライバ(右)PWM |
OUT |
| D11 |
モータードライバ(左)Direction |
OUT |
| D12 |
モータードライバ(左)PWM |
OUT |
| D13 |
フォトトランジスタ |
IN |
| D10 |
赤外線LED |
OUT |
・Raspberry Piシールド
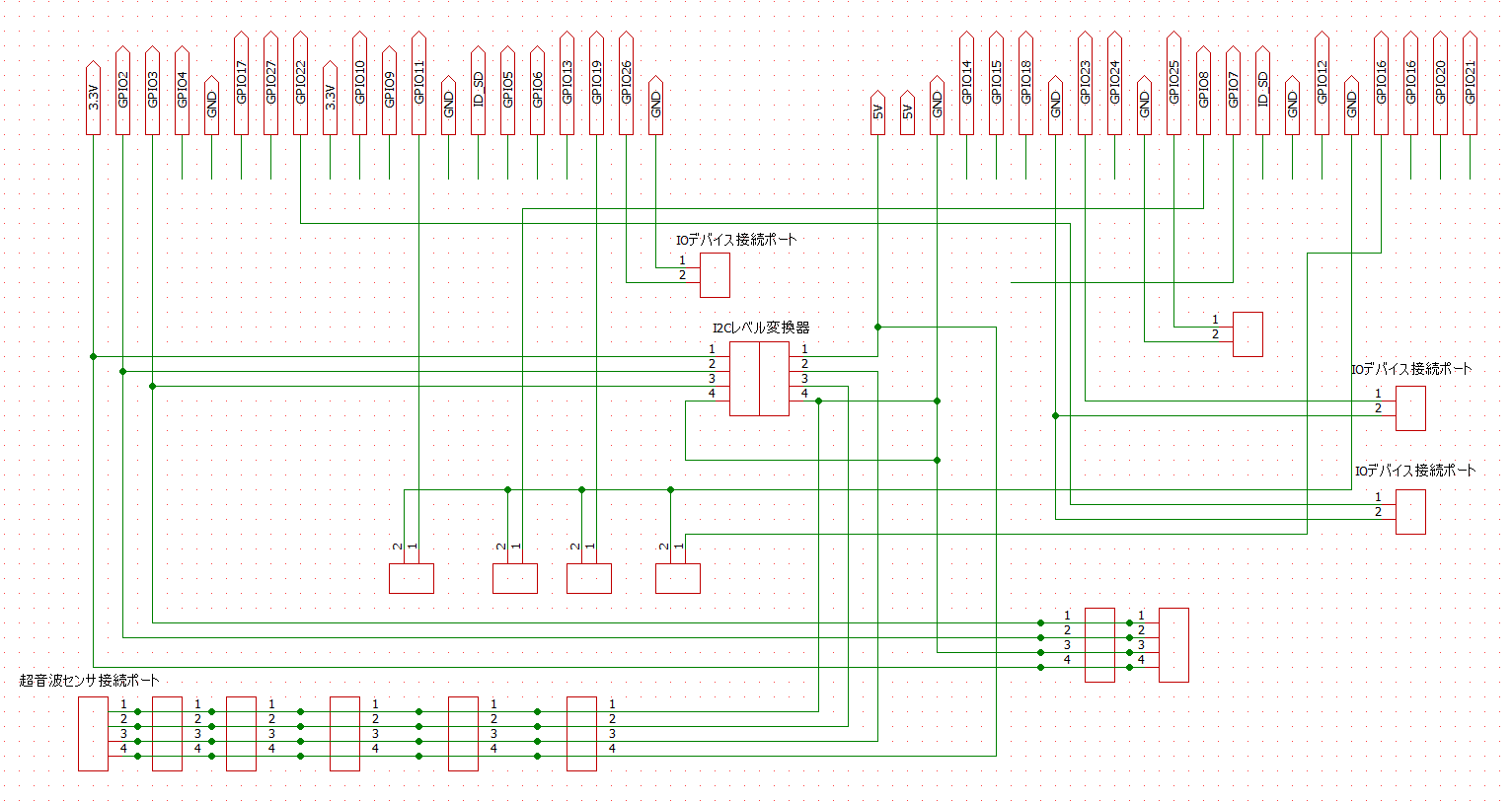
fig4 Rasberry Pi
Table.3 ピン配置
| ピン番号 |
接続デバイス |
IN/OUT |
| GPIO2(SDA) |
I2Cレベル変換器,超音波センサ,光センサ |
OUT |
| GPIO3(SCL) |
I2Cレベル変換器,超音波センサ,光センサ |
OUT |
| GPIO22 |
未使用 |
|
| GPIO11 |
タッチセンサ |
IN |
| GPIO19 |
タッチセンサ |
IN |
| GPIO26 |
未使用 |
|
| GPIO23 |
未使用 |
|
| GPIO25 |
未使用 |
|
| GPIO8 |
タッチセンサ |
IN |
| GPIO7 |
未使用 |
|
| GPIO16 |
タッチセンサ |
IN |
・
5.アンプの製作
アンプの製作は仕様書を読み手順通りに行った。
また完成後のノイズが大きかったためはんだ付けしたところなどを再度確認したり、補強するなどをした。
以下にアンプの回路図を示す。
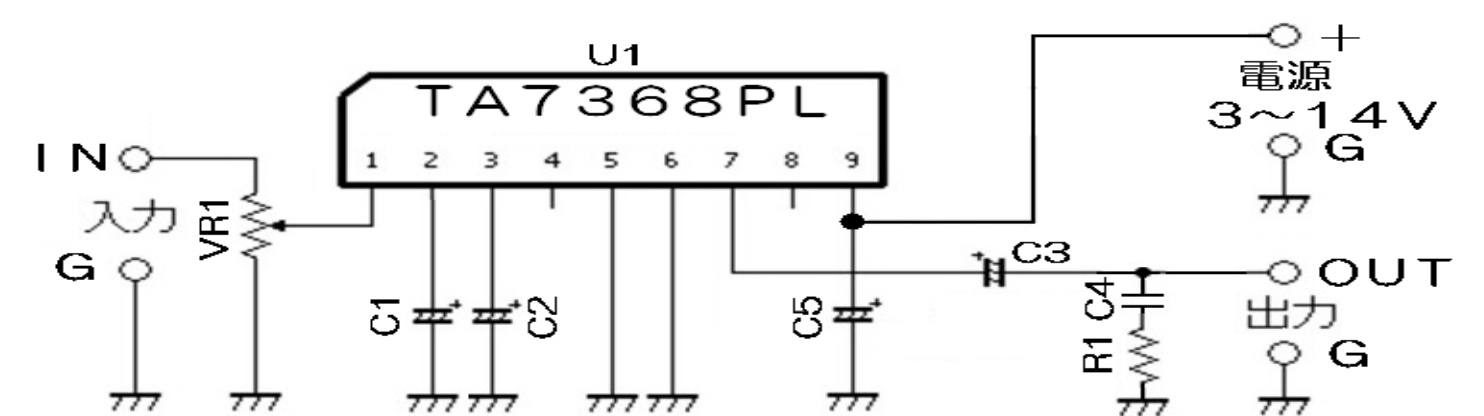
fig5 アンプ回路図
MIRS1802 管理台帳へ戻る