2.Raspberry Pi
Raspberry Piにおける機能概要をTable1に示す。
| 機能 | 内容 |
|---|---|
| コンパイル | ユーザーによってロボットに並べられたパネルを内部の広角カメラで読み取り、次の動作を決定する。 パネルの代わりに箱が置かれている場合は、次の動作が片付けであることを記憶する。 |
| プログラム実行 | ユーザーがパネルを並べて作成したプログラムを実行する。 パネルによる動作には、前進、後退、左回転、右回転、待機、動作終了、ループスタート、ループエンドがある。 |
| パネルの片付け | ロボットの前方向に取り付けられたカメラで、地面のパネルをみつけて片付ける。 |
| スイッチの監視 | ユーザーによるスイッチ押下を監視する。 |
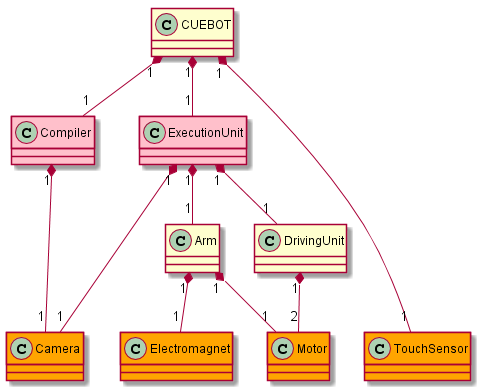
Raspberry Piのクラス図をFig.1に示す。
2.2 機能設計
Raspberry Piのプログラムで使用するクラスの構成内容を、低級なものから順にTable2に示す。
| クラス名 | 目的 |
|---|---|
| Camera | Webカメラの制御 |
| Electromagnet | 電磁石の制御 |
| Motor | モータの制御(内部的にはArduinoに出力を依頼するのみ) |
| TouchSensor | スイッチの制御 |
| Arm | 電磁石とモータで構成されるアームの制御 |
| DrivingUnit | 車体駆動用のモータ2つで構成される駆動部の制御 |
| Compiler | 内部のWebカメラでパネルを読み取り動作を決定 |
| ExecutionUnit | Compilerに依頼された動作を実行 |
| CUEBOT | すべてのクラスの結合 |
3.Arduino
-
3.1 構造設計
Arduinoにおける機能概要をTable3に示す。
Table3 Arduino 機能概要 機能 内容 モータ出力 Raspberry Piから依頼を受けて、機体に使用する3つのモータに出力する。 バッテリー残量確認 模型用バッテリーの残量を確認する。
Arduinoのモジュール構成図をFig.2に示す。
なお、標準プログラムからの変更点は機能設計で述べる。
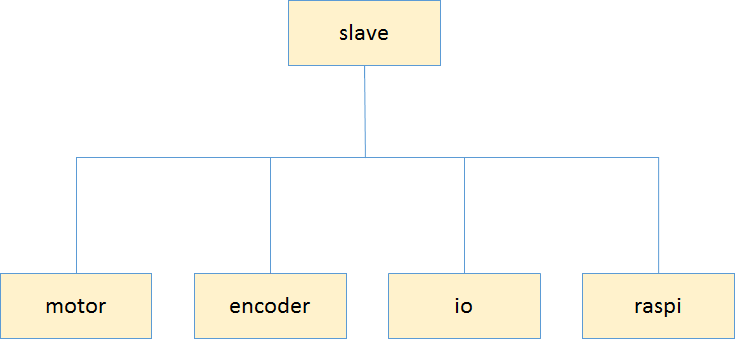
Fig.2 Arduino モジュール構成図
3.2 機能設計
Arduinoのプログラムで使用するモジュールの構成内容をTable4に示す。
Table4 Arduino 構成内容 モジュール名 目的 変更内容 motor モータのPWM制御を行う。 アーム用モータの制御を追加。 encoder エンコーダの読み取りを行う。 アーム用エンコーダの読み取りを追加。 io Arduinoに接続された機器(バッテリー等)の制御を行う。 raspi Raspberry Piとの通信処理を行う。 やり取りするデータの変更にあわせ、プログラムを改善。 slave motor, encoder, io, raspiの結合。 下位モジュールの変更にあわせ、全面書き直し。
4.各パートへのリンク
- 基本設計書(全体)
基本設計書(メカニクス)
基本設計書(エレクトロニクス)
MIRS DATABASE