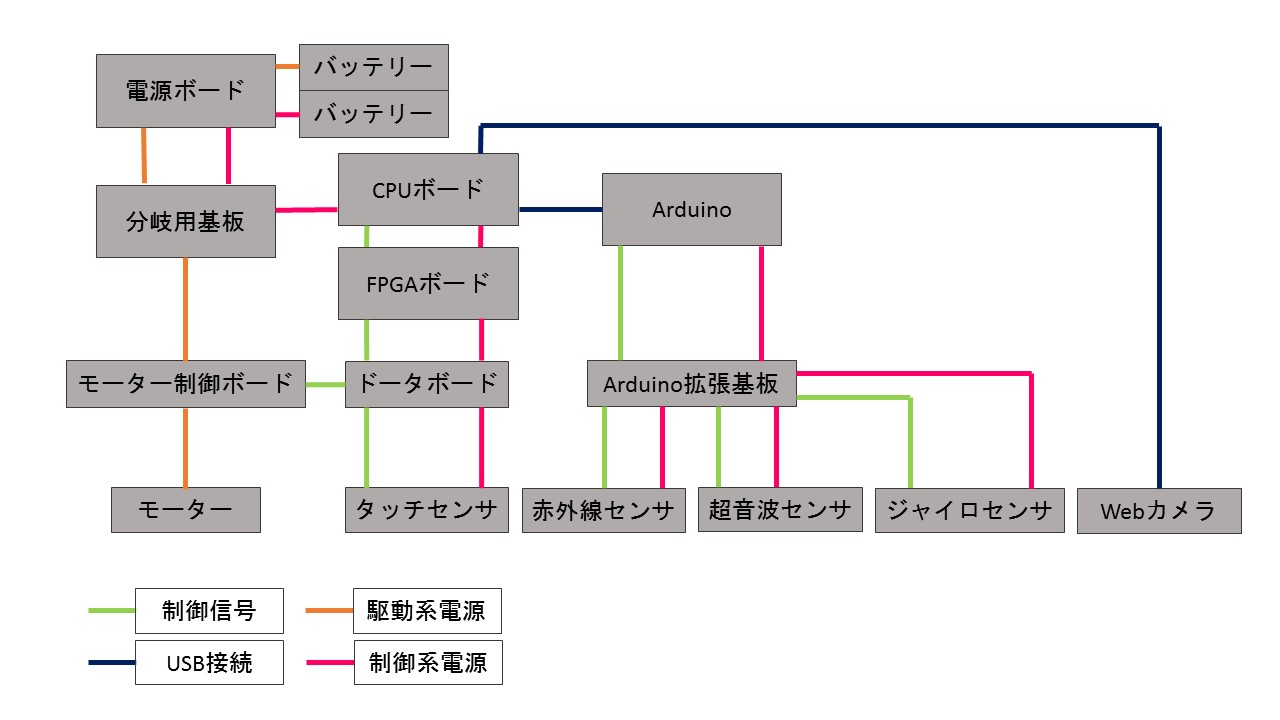
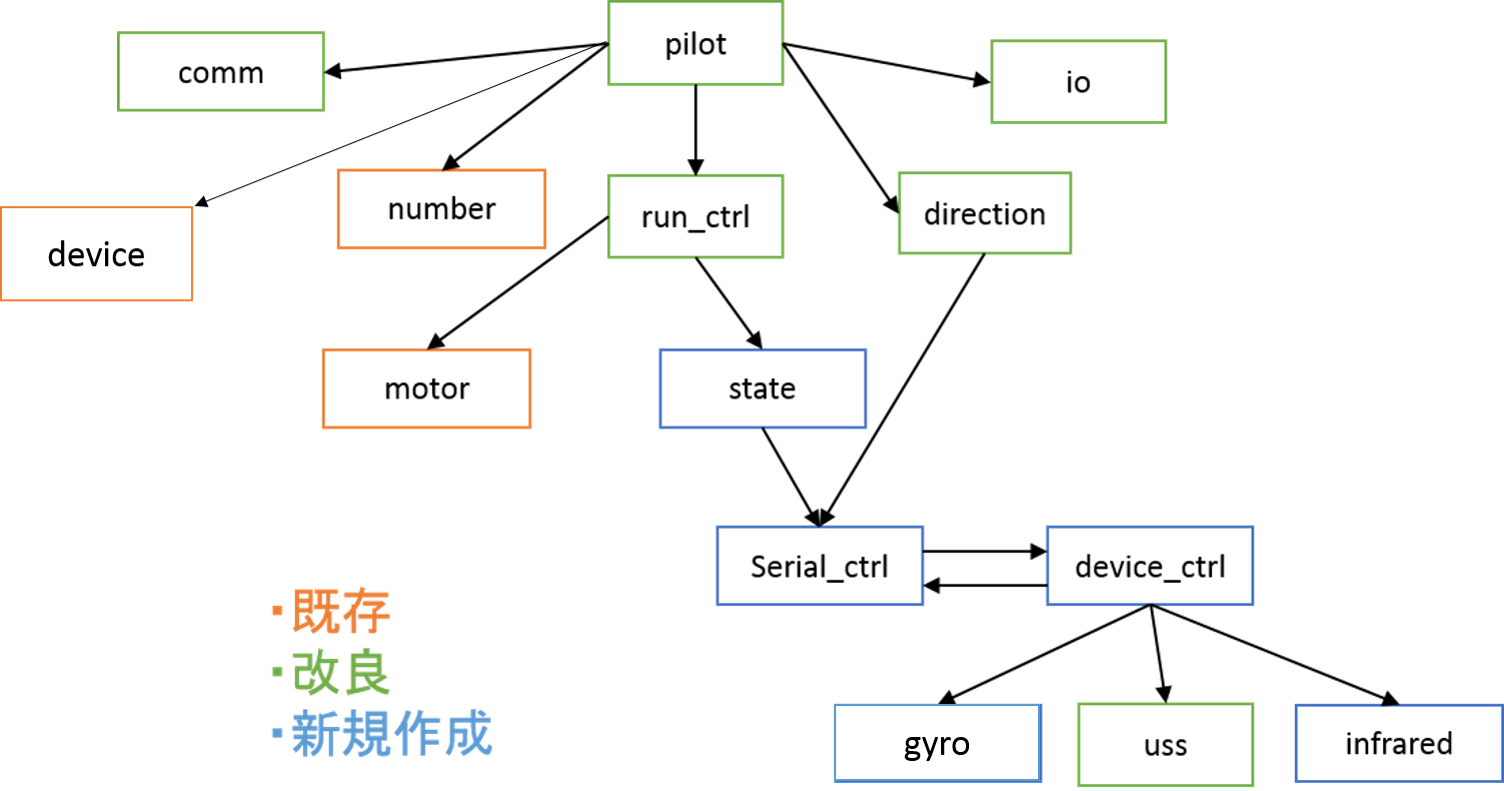
| ドータボード |
FPGAボードからの信号を他のボード、センサへと接続する |
ドータボードのケーブルコネクタを排し、ピンヘッダを取り付ける |
ドータボードとFPGAボードをケーブルを介さずに接続するため |
1 |
永田 |
| 電源ボード |
CPUボード、超音波センサ、モータ制御ボードに電力を供給する |
コネクタを換装し、メカニクスの仕様に合わせた寸法に変更する |
経年劣化によるコネクタの緩みを解消するとともに、メカ二クスの仕様に合わせたボードの寸法にするため |
1 |
大濱 |
| CPUボード |
MIRS1603全体の制御を行う |
変更点なし |
- |
- |
- |
| FPGAボード |
CPUボードから入力される信号を各ボードを制御する信号に変換し出力する
各ボード、センサからの入力信号を変換しCPUボードへ出力する |
FPGA回路を書き換える |
エンコーダの廃止に伴い、PIN配列を整理するため |
1 |
田中、永田 |
| モータ制御ボード |
FPGAから入力されたPWM信号からモータを制御する |
エンコーダの廃止、2つのボードを一体化する |
メカニクスの仕様に合わせたボードの寸法にするため |
1 |
片山 |
| 電源ケーブル |
電源と電源ボードを接続する |
コネクタ部分を新しい部品にする |
電源ボードのコネクタの変更に伴い、対応したコネクタに換装するため |
1 |
大濱 |
| Arduino拡張基板 |
赤外線センサと超音波センサの値をArduinoに出力する |
超音波センサ、赤外線センサ、ジャイロセンサのピンの数に対応したコネクタを取り付ける |
センサとArduinoをコネクタで接続するため |
1 |
田中 |
| ジャイロセンサ固定用基板 |
ジャイロセンサを固定する |
機体に固定しやすくするためにねじ穴を開け、さらに3端子、2端子のコネクタを1個ずつ取り付ける |
ジャイロセンサを固定しコネクタ付きケーブルでArduino拡張基板と接続するため |
1 |
永田 |
| 分岐用基板 |
電源ボードからの出力をCPUボードとモータ制御ボードに分岐する |
MIRS1501のものを使用する |
- |
- |
- |