以下に競技会での目標を達成するためのシステムについて示す。
高精度で機動性の高い走行のための機体改良
機能上必要な部品の洗い出しやシャーシ形状の最適化、駆動輪の軽量化を行う。これにより機体の重量や回転系部品の慣性モーメントを抑え,高速走行や急停止・急発進を可能とする。
また機体形状の変更によって荷重を3点で支え、駆動輪への荷重を増加させることで、駆動輪の空転防止が期待される。
駆動輪の改良
標準機の駆動輪は柔らかいため、変形による機体のふらつきが発生しやすい。これを防ぐため、硬い駆動輪を用いる。
また旋回時の精度を向上するため、細身の駆動輪を用いる。これにより横方向の接地面の移動を制限でき、旋回時の動作が安定する。
硬く細い駆動輪で駆動力を確実に伝えるため、粗目の紙やすりやマジックテープなどからグリップと回転抵抗のバランスがよいものを用いる。
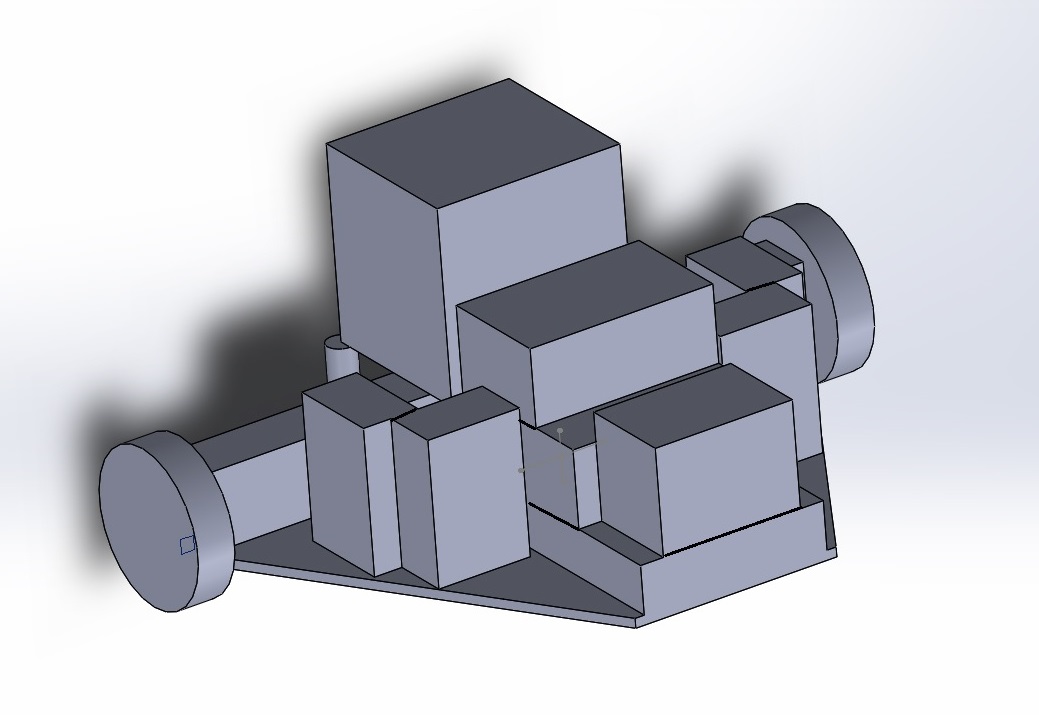
パーツレイアウトの検討による車体の小型・軽量化とメンテナンス性の向上
CPUボードやFPGAボード、電源ボードといった多くのボード類のシャーシ上でのレイアウトを最適化し、機体の小型化を実現する。また、シャーシや基板の最適化により軽量化を実現し、小型化を可能とする。
それと同時に、設計時から機体のメンテナンス性を考慮した設計を行う。それにより、バッテリの交換作業やボードの保守、点検のしやすい、メンテナンス性の高い機体を実現する。
複数の赤外線センサによる怪盗機の迅速な発見・追跡
前方に複数の赤外線センサを取り付けることにより怪盗機のより迅速な発見・追跡を実現する。また、MIRS1501の機体を参考にし、赤外線センサからの情報をarudinoを用いて処理する。
これによってCPUでの処理を簡略化する。
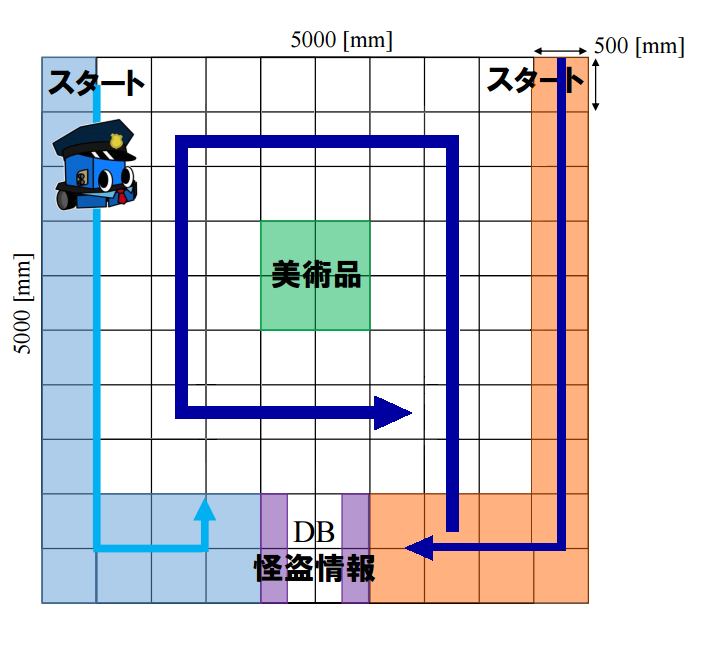
超音波センサ、電子コンパスによる自己位置認識・補正
MIRS1603の自己位置の認識・補正は超音波センサと電子コンパスを用いて行う。
直線では左右の超音波センサを使用して壁との距離を測定し、PI制御により
その値を一定に保ちながら角まで移動する。
前と左右の超音波センサを使用して角の前に来たことを認識し位置を補正する。
このとき電子コンパスから取得した現在の方向に補正をかける。
回転できたか否かの判断と現在の巡回方向は電子コンパスにより認識する。
これにより、バッテリの特性変動による影響を受けやすいエンコーダによる距離測定を廃止する。