本ドキュメントは、MIRS1601のソフトウェア詳細設計について記したドキュメントである。
モジュール構成を以下に示す。
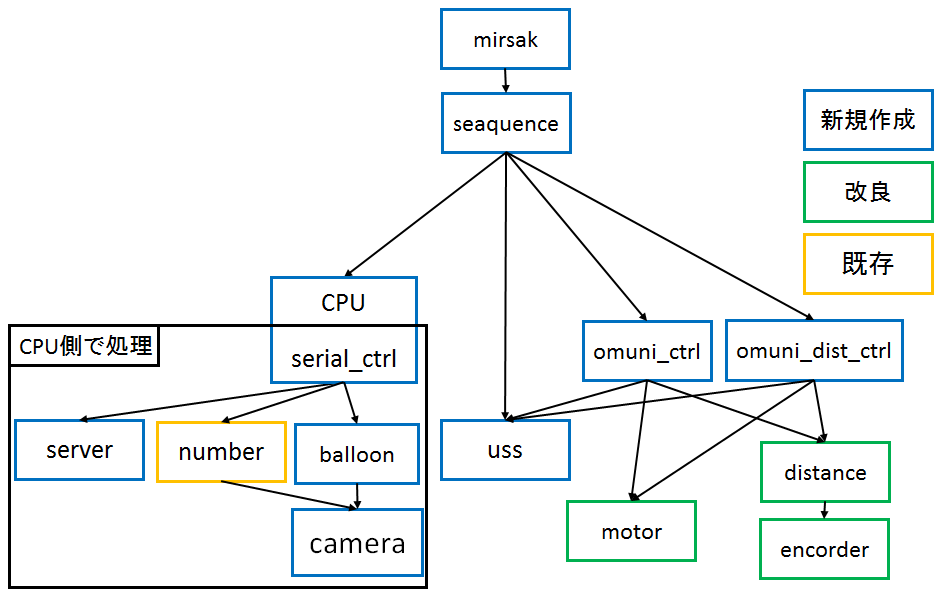
fig.1 モジュール構成
以下にArduinoで使用するモジュールの一覧を示す
| モジュール名 | 概要 | 関数名 | 担当 |
|---|---|---|---|
| mirsak | mirs全体の動作を管理する。 | void set_up(void) void loop(void) |
打味 |
| sequence | スタートから数字認識、展示室進入までの動作を行う。 | void sequence_main(void) | 打味 |
| omuni_ctrl | オムニホイールを制御、壁との距離を測定して走行する。 | void omuni_ctrl_execute(void) void omuni_ctrl_set(omuni_state_t state, double speed, int dist) void omuni_ctrl_reset(void) |
諏訪 |
| omuni_dist_ctrl | オムニホイールを制御、距離計のみを用いて走行する。 | void omuni_dist_ctrl_execute(void) void omuni_ctrl_set(void) |
打味 |
| motor | モータを動かす。 | void motor_set(int pwm_n, int pwm_s, int pwm_e, int pwm_w, byte state) | 打味 |
| distance | 走行距離を管理する。 | void distance_get(double *dist_n, double *dist_s, double *dist_e, double *dist_w) | 諏訪 |
| encoder | エンコーダ値を管理する。 | void encoder_open(void) void encoder_get(long *cnt_n, long *cnt_s, long *cnt_e, long *cnt_w) static void enc_change_n(void) static void enc_change_s(void) static void enc_change_e(void) static void enc_change_w(void) |
久保寺 |
| uss | 超音波センサの信号処理を行う。 | int uss_get(int uss_port) | 久保寺 |
| cpu | CPUとの通信を行う。 | void cpu_open(void) void cpu_num_trans(uint8_t cam_no) int cpu_com_read(char *c) |
打味 |
以下にCPU側で使用するモジュールの一覧を示す。
| モジュール名 | 説明 | 関数名 | 担当 |
|---|---|---|---|
| number | 数字認識を行う。 | int number_get(int dist) int number_serial(void) |
久保寺 |
| server | 認識した数字をサーバーに送る。 | void server_send(int number) | |
| balloon | 怪盗機の赤い風船を認識する。 | int picture_detect(int cammnum,int *area) int balloon_serial(void) |
|
| serial_ctrl | CPUとArduinoの間で信号を共有して処理する。 | void serial_cpu(void) | 打味 |
使用するモジュールの仕様について示す。
既存のモジュールは、変更点がある部分のみ示す。
参考:MG3S 標準プログラム 関数レファレンス
| 関数名 | 引数 | 戻り値 | 動作説明 |
|---|---|---|---|
| void set_up(void) | なし | なし | エンコーダ、CPUの起動時の処理を行う |
| void mirsak_main(void) | なし | なし | モジュール全体を統合し管理する。 |
| 関数名 | 引数 | 戻り値 | 動作説明 |
|---|---|---|---|
| void sequence_main(void) | なし | なし | スタート地点から走行して数字認識を行い、展示室に入る。 |
| 関数名 | 引数 | 戻り値 | 動作説明 |
|---|---|---|---|
| void omuni_ctrl_execute(void) | なし | なし | 走行制御の処理を実行する。 |
| void omuni_ctrl_set(omuni_state_t state, double speed, int dist) | 走行モード、走行速度[cm/s]、走行距離[cm] | なし | オムニホイールによる走行モード、走行速度、壁との目標距離をセットする。 |
| void omuni_ctrl_reset(void) | なし | なし | 状態を初期化する。 |
| 関数名 | 引数 | 戻り値 | 動作説明 |
|---|---|---|---|
| void omuni_ctrl_execute(void) | なし | なし | 走行制御の処理を実行する。 |
| void omuni_ctrl_set(omuni_state_t state, double speed, int dist) | 走行モード、走行速度[cm/s]、走行距離[cm] | なし | オムニホイールによる走行モード、走行速度、走行距離をセットする。 |
| 関数名 | 引数 | 戻り値 | 動作説明 |
|---|---|---|---|
| void motor_open(void) | なし | なし | モータに使用するピンの設定を行う。 |
| void motor_set(int pwm_l,int pwm_r,int pwm_f,int pwm_b) | 左右前後のモータPWM指令値(0~±255) | なし | モータへPWM指令値を与える。 |
| 関数名 | 引数 | 戻り値 | 動作説明 |
|---|---|---|---|
| void encoder_open(void) | なし | なし | エンコーダに使用するピンの設定とエンコーダカウント関数の割り込み設定を行う |
| void encoder_get(long *cnt_l,long *cnt_r,long *cnt_f,long *cnt_b) | 左右前後のエンコーダ回転数 | なし | エンコーダの回転数を取得する。 |
| void encoder_reset(void) | なし | なし | エンコーダの回転数をリセットする。 |
| static void enc_change_n() | なし | なし | 北側のタイヤのエンコーダを読み取る。 |
| static void enc_change_s() | なし | なし | 南側のタイヤのエンコーダを読み取る。 |
| static void enc_change_e() | なし | なし | 東側のタイヤのエンコーダを読み取る。 |
| static void enc_change_w() | なし | なし | 西側のタイヤのエンコーダを読み取る。 |
| 関数名 | 引数 | 戻り値 | 動作説明 |
|---|---|---|---|
| void distance_get(double *dist_n, double *dist_s, double *dist_e, double *dist_w) | 前後左右のタイヤの走行距離[cm] | なし | 前後左右のタイヤの走行距離を取得する。 |
| 関数名 | 引数 | 戻り値 | 動作説明 |
|---|---|---|---|
| double uss_get(int uss_port) | 処理を行う超音波センサの番号 | 測定結果を返す[cm] | 超音波センサの信号処理を行う。 |
| 関数名 | 引数 | 戻り値 | 動作説明 |
|---|---|---|---|
| int number_get(int dist) | 数字認識を行う距離 | 読み取った数字、エラーがあれば-1 | モジュール全体を統合し管理する。 |
| int number_serial(void) | なし | 読み取った数字、エラーがあれば-1 | CPUとAruduino間の通信を管理する。 |
| 関数名 | 引数 | 戻り値 | 動作説明 |
|---|---|---|---|
| void server_send(int number) | 数字認識で読み取った数字 | なし | サーバーとの通信を行う。 |
| 関数名 | 引数 | 戻り値 | 動作説明 |
|---|---|---|---|
| int balloon_detect(int cammnum,int *area) | 使用するカメラのポート、赤色の面積 | 正常に終了したら0、エラーがあれば-1 | カメラで撮影し、撮影した画像の赤色の占める面積を計算する |
| int balloon_serial(void) | なし | 読み取った数字、エラーがあれば-1 | CPUとAruduino間の通信を管理する。 |
| 関数名 | 引数 | 戻り値 | 動作説明 |
|---|---|---|---|
| void serial_cpu(void) | なし | なし | CPUとArduinoの間で信号を共有して処理する。 |
フローチャートを以下に示す。また、競技フィールドの右端を0[deg]としてMIRSの角度表示を絶対角度として表す。

fig.2 競技フィールドとMIRSの基準角度
MIRS1601の機体は方向転換せずにオムニホイールによって指定した方向へ走行する。便宜上、競技フィールドとMIRS1601の絶対角度を一致させて以下のフローチャートでは方向を指定する。
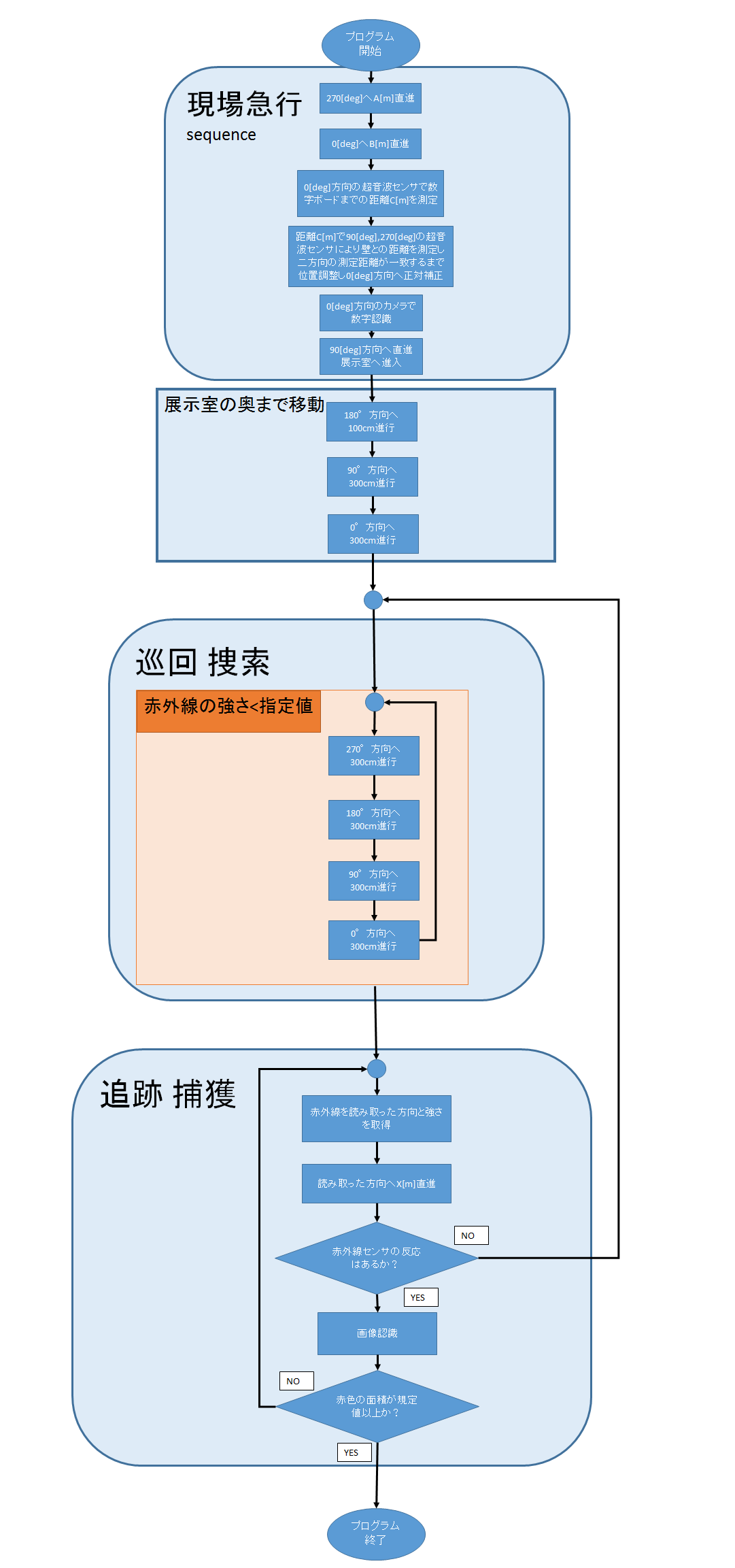
fig.3 フローチャート
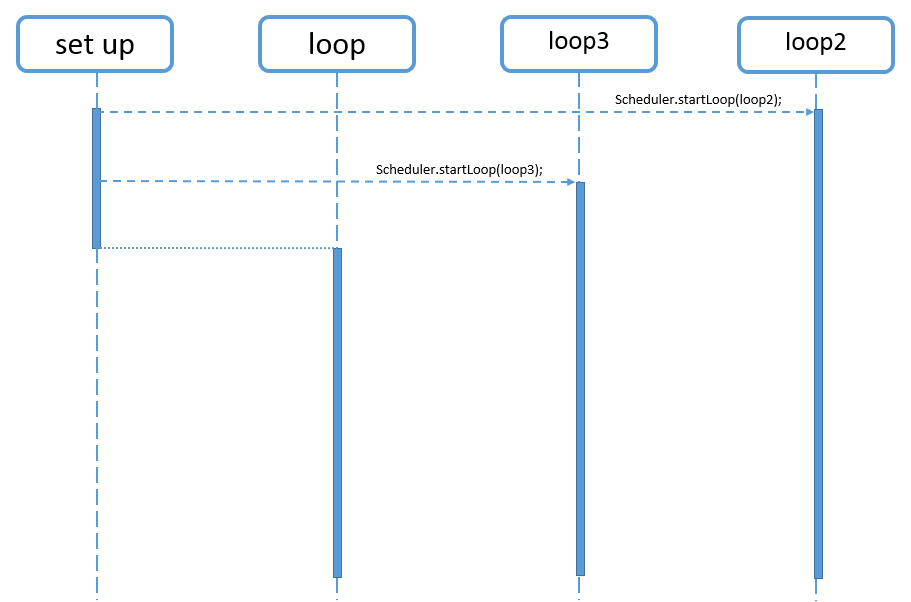
fig.4 スレッド構成図
loopではメインの走行プログラムを実行する。LEDや音楽再生など、別で動作し続ける処理を必要とするモジュールについては、適宜スレッドの生成を行う。
既存のテストプログラムがあるものは、それを実施する。
その他のモジュールで第1段階で使用するものについて以下に示す。
-
モジュール単体試験
モジュール単体試験では、各モジュールが正常に動作するかを試験する。motor
distance
uss
encoder
- 上記の5つのモジュールに関してはMG3S標準プログラムを用いたい単体テストを参考にして単体試験を行う。
omuni_ctrl
omuni_dist_ctrl
- オムニホイールを用いた走行制御に関する単体試験を行う。
- 指定した方向に対してオムニホイールによる走行ができるか確認する。
- 指定距離または指定した壁との距離まで走行できるか確認する。
sequence
- 競技場のスタート位置から数字ボードがあるところまで、確実にたどり着けることを確認する。
number
- 数字を正しく認識できることを確認する。
- 正しく認識できなかったときに、位置を修正することで正しく認識できるようになることを確認する。
- 数字認識後に、指定した位置に移動することを確認する。
balloon
- 画像認識ができるかどうかを確認する。
- 赤い風船が正しく認識できるかテストする。
- さまざまな角度や距離でテストを行う。
-
機能試験
機能試験では、一部のモジュールを組み合わせた時に正常に動作することを確認する。走行テスト
- 走行制御(motor,encoder,distance)モジュールの動作を確認する。
- 追加したomuni_ctrl,omuni_dist_ctrlモジュールの動作を含めて走行テストを行う。
- 直進、オムニホイールによる走行が安定して行えた場合を合格とする。
現場急行 と 数字認識
- sequence と numberを統合して、スタート地点から開始して数字認識を成功させ、展示室に進入できたら合格とする。
巡回
- patrolモジュールの巡回機能について確認する。
- 指定したルートを走行できるかをテストする。
追跡・確保
- 怪盗機を追跡できるかを確認する。
- 赤外線センサを用いて、怪盗機の方向を認識できるか
- 認識した方向に対して移動することができるかをテストする。
-
統合試験
- 統合試験では、すべてのモジュールを組み合わせて、本番で行う一通りの動作が正常に動作することを確認する。
- ヘッダのincludeは全て、mirsak.inoの先頭で行う。その他のinoファイルではincludeしない。
- 変数型の定義は全て、inoファイルではなくヘッダで行う。
- 定数は可能な限り、ヘッダ内でマクロ定義することで名前の重複を見つけやすくする。また、単一の関数でのみ使用することが明確な定数は、その関数の中で定義する。
- 書き間違いを防ぐために関数プロトタイプ宣言はヘッダに書かない。
- 関数名は、先頭にモジュールの名前をつけることで重複を避ける。
- 変数名は、ループに用いる変数以外は、意味のわかる名前とする。
- 共有変数の使用は必要最小限とする。
- 可読性を上げるために必要なコメントを入れる。
- 同一モジュール内で共通して使用する変数は関数の外で static 宣言する。
- 同一モジュール内でのみ使用する関数は static 宣言する。
- 全てのモジュールについて単体機能試験を実施する。