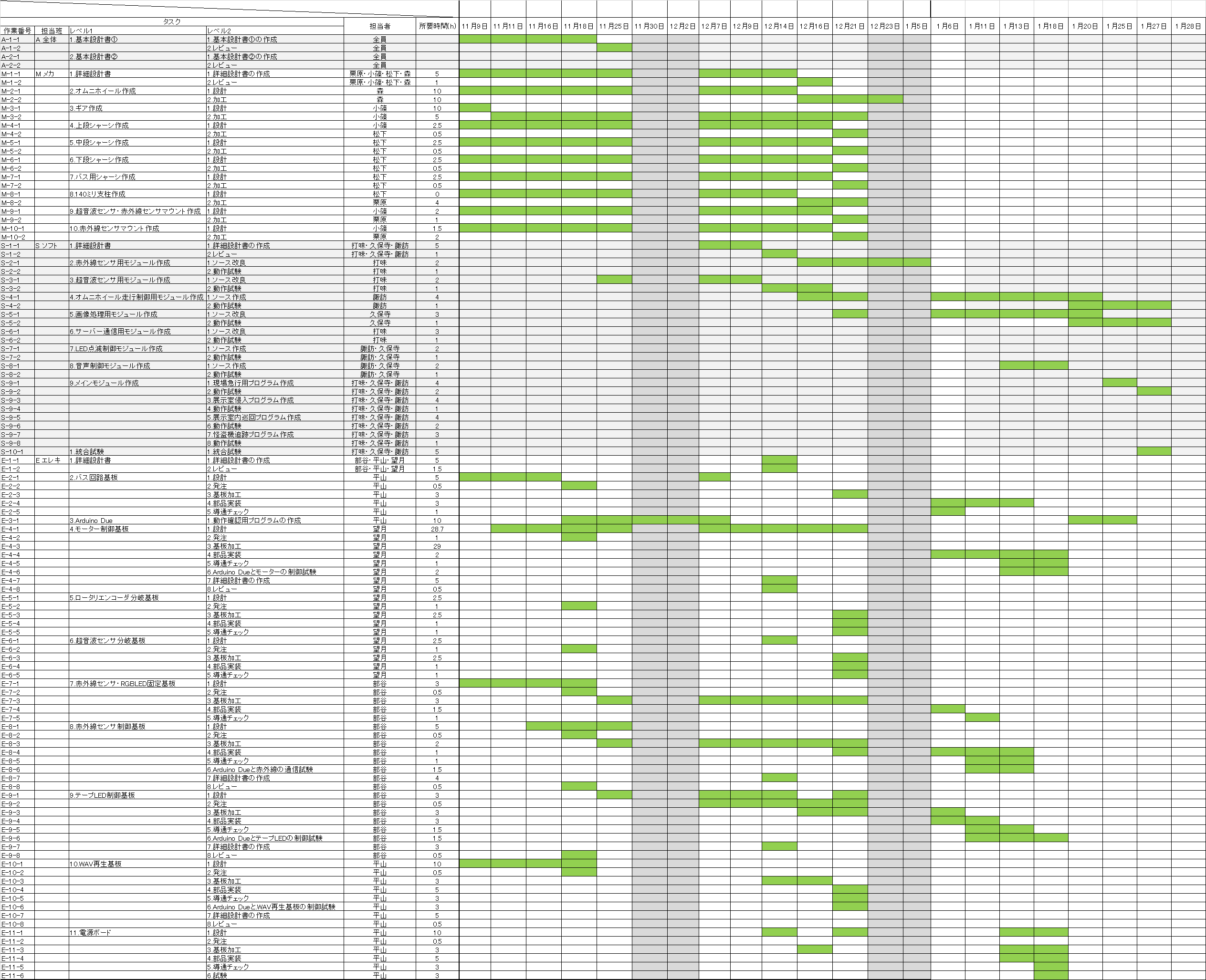
表1 作業日程
-
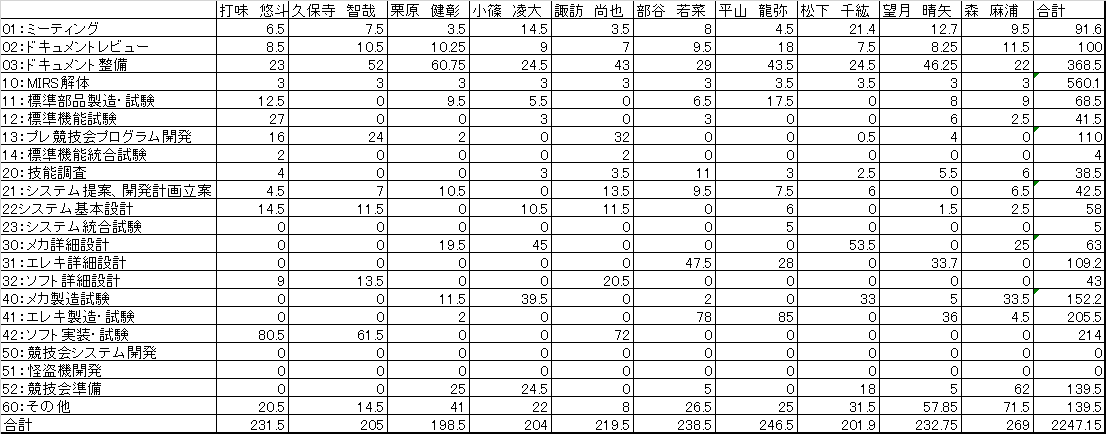
初期機体からの大幅な仕様変更に伴い多くの部品のスケジュールが組まれ構想が練られた。
しかし、詳細設計書のレビューが予定していた期間を過ぎてしまい、修正にかかり始める期間も同様に遅くなったことから全体的にスケジュールが後ろに伸びてしまった。
また設計構想が甘かったことから、指摘される事が多く、修正量も増えてしまった。
これらが原因で、作業量が2倍程になり、予定していた期間を超えてしまう事態になったと考えられる。
-
製作基板の最終的には目的通りのものが出来上がった。
しかし、設計の難航や、製作しても意図通りに動かなかったりと、完成に至るまでにかなりの時間を要してしまった。
これは、設計に必要な前提知識(ツールの使い方、回路素子の知識)が足りていなかったことや、スケジュールに対する見通しの甘さが原因として挙げられる。
これらから学んだことは、ツールの使い方は開発を始める前から必ず習得しておく(今回の場合は前期にやっておくべきだった)こと、毎回作業を始める前は各個人の作業の進捗状況を報告しあうことが挙げられる。
これらが出来ていればより工期も早くなり、品質や機能の向上を図る時間が生まれ、より良いMIRSを製作することが出来ていたと思う。
-
MIRS1601のプログラムの元となったものは、来年度から使用されるMIRS MG4のプログラムであった。
このプログラムを自分たちのプログラムとして使えるように改良することが主な作業だったため、あまり開発スケジュールを詰めなかった。
また、ソフト班の仕事はエレキ班の開発が終了したあとに来るものが多かったため、エレキ班が終わり次第やるというような「風潮」が出来ていた。
これらが原因で、ソフト班の士気はあまり上がらず、エレキ班の開発が終わるのを待つだけという結果になった。
スケジュール表に1月以降の予定を記さなかったこともあってか、この先やっていくべきことが見えていなかったのも原因の一つだろう。
MIRS競技会前日どころか、当日まで大きな変更を余儀なくされたことはMIRSの動作の仕上がりに大きく寄与していると思われる。
スケジュールを立てる段階からもう少し考えておくべきだったと思う。