はじめに
本ドキュメントは、MIRS1601の第一段階の開発における基本設計書である。
動作シナリオ
図1に動作シナリオを示す。
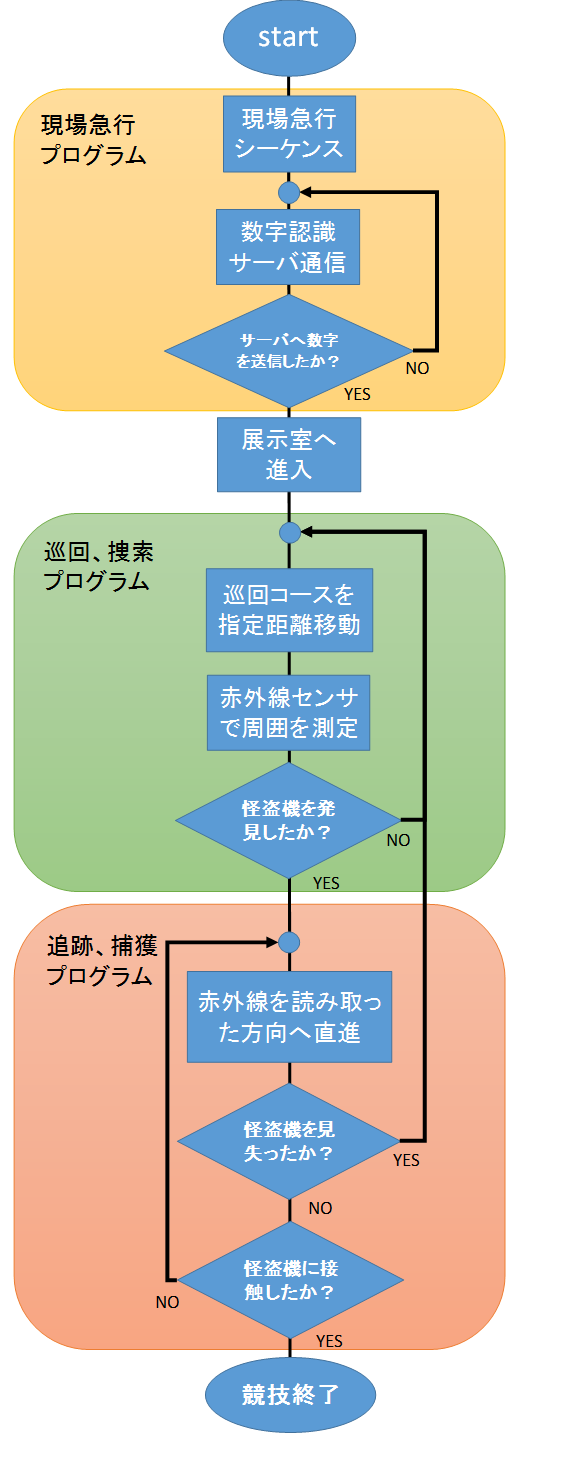
- 図1 動作シナリオ
機能・性能
競技目標、及び基本・拡張機能を以下に示す。
競技目標
Table1 競技目標 動作 概要 目標タイム[s] 現場急行 直進、右左折を行う。 8 数字認識 DBに表示されている数字をカメラを用いて認識する。 5 巡回・追跡・確保 怪盗を補足し追跡、確保する。 20 合計タイム 33 基本機能
Table2 基本機能 機能 内容 実現方法 直進走行 超音波センサとオムニホイールを用いて、迅速かつ正確な直進走行を行えるように補正する。 超音波センサを8個に増設する。オムニホイールへ変更。 正体補正 正体補正を行う。 機体の八方位に超音波センサを設置。前後左右にある壁との距離を測り、正体補正を行う。 数字認識 正体補正を行い、機体正面のカメラにより数字の撮影を行う。 数字ボードへの接近を機体正面の超音波センサで認識し、ボードからある程度距離をとった後正体補正を行い、数字を撮影する。 巡回動作 競技フィールド内を順路に従い怪盗機を捜索する。順路は図2の巡回順路を参照 超音波とエンコーダによりMIRSの位置を測り、捜索順路通りに移動する。 怪盗の認識 撮影した画像から赤い部分を見つけ、怪盗機の位置を特定する。 前方と左右に設置した3つのカメラを用いて行う。 怪盗の追跡 怪盗を認識後、赤外線センサによる怪盗の追跡を行う。 機体に赤外線センサを8つ設置し、追跡を行う。 サーバへの通信 数字認識において、画像から得られた数字データをサーバへ送信する。 数字のデータをsshで送る。 拡張機能
Table3 拡張機能 機能 拡張目的 実現方法 LEDによる機体装飾 見た目で相手より目立ち、かつ観客を魅了するため。 テープLEDを機体に取り付ける。 音声機能の搭載 観客を沸かせるため。 スピーカーを取り付ける。
順路を以下に示す。
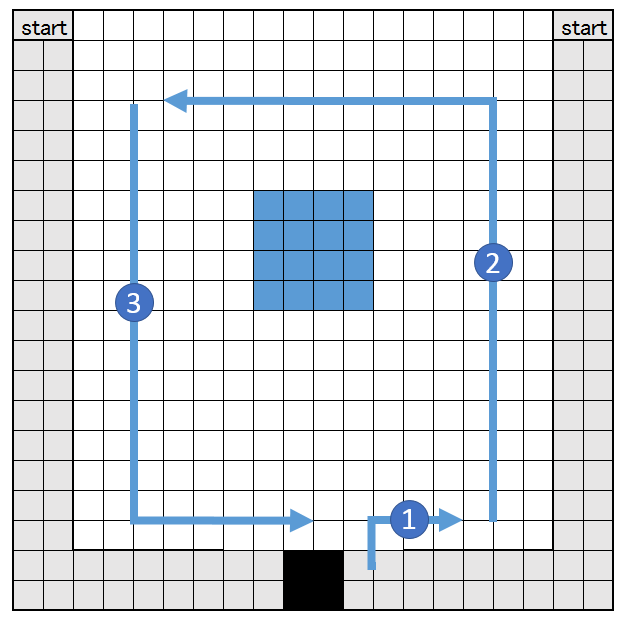 図2.巡回順路
図2.巡回順路システム構成
1.メカニクス構成
- 開発概要
開発項目 目的・理由 方法 責任者 シャーシ作成 拡張性の向上と機体の小型化を図る為 図面を作成後レーザー加工機で作成 栗原・松下 オムニホイールの作成 機動性向上の為 シャーシ同様に外形を削りだした後、手作業で組み立て 森 ギアの作成 モータの回転をより正確にエンコーダに伝える為 3Dプリンタを用いて作成 小篠
- 機体外形
機体外形を以下に示す。
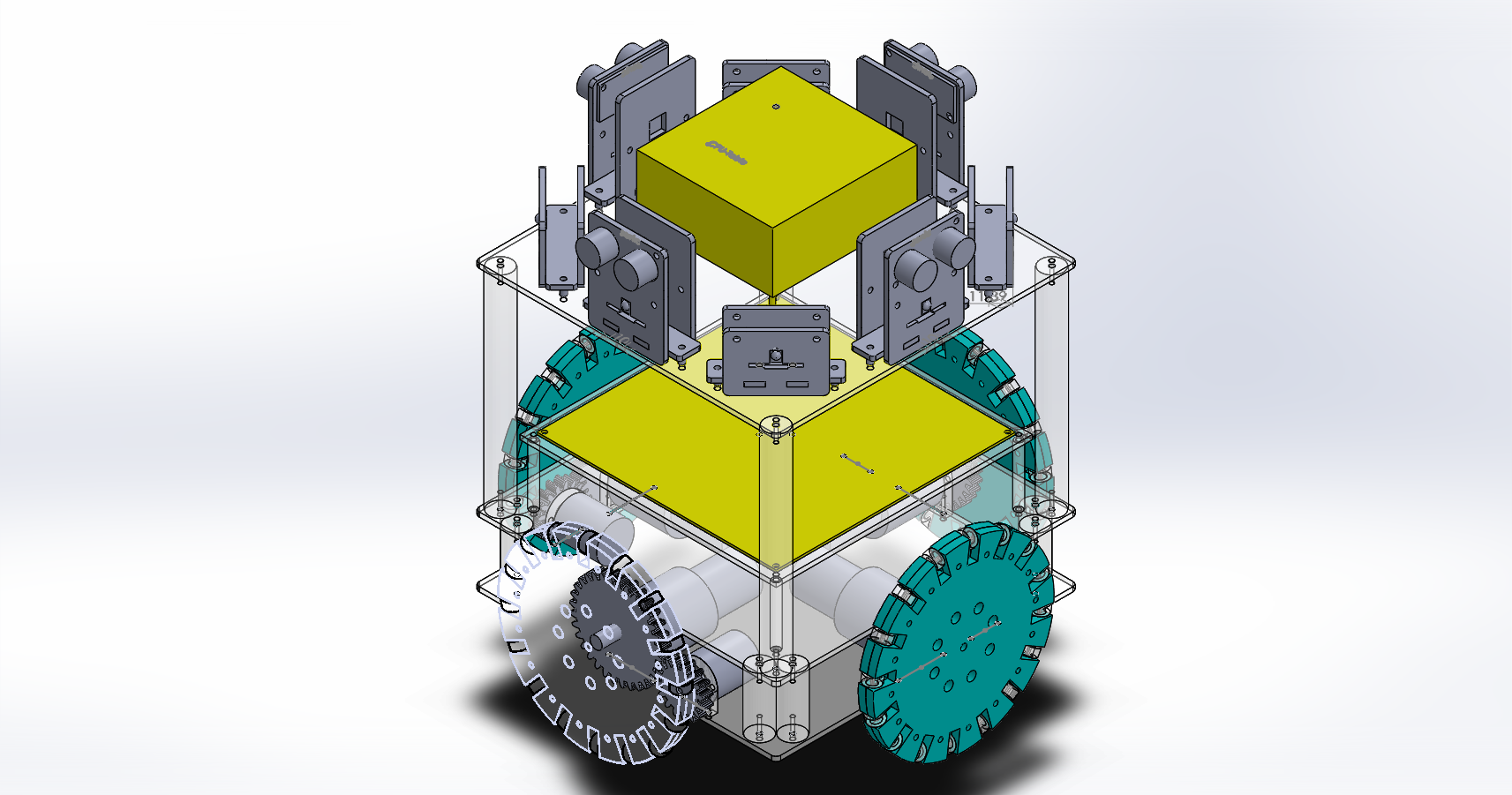 図3.外形図
図3.外形図
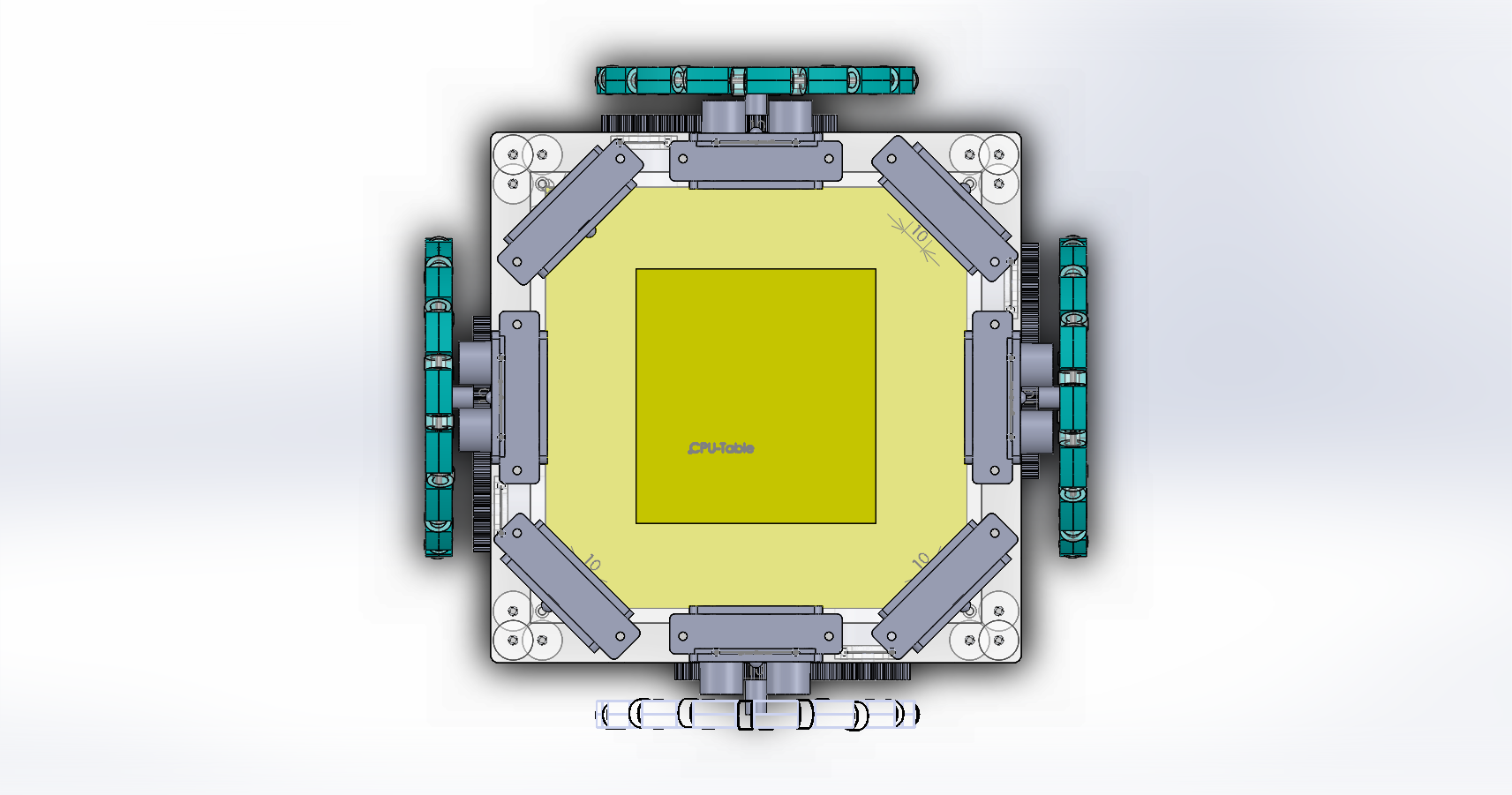 図4.上面図
図4.上面図
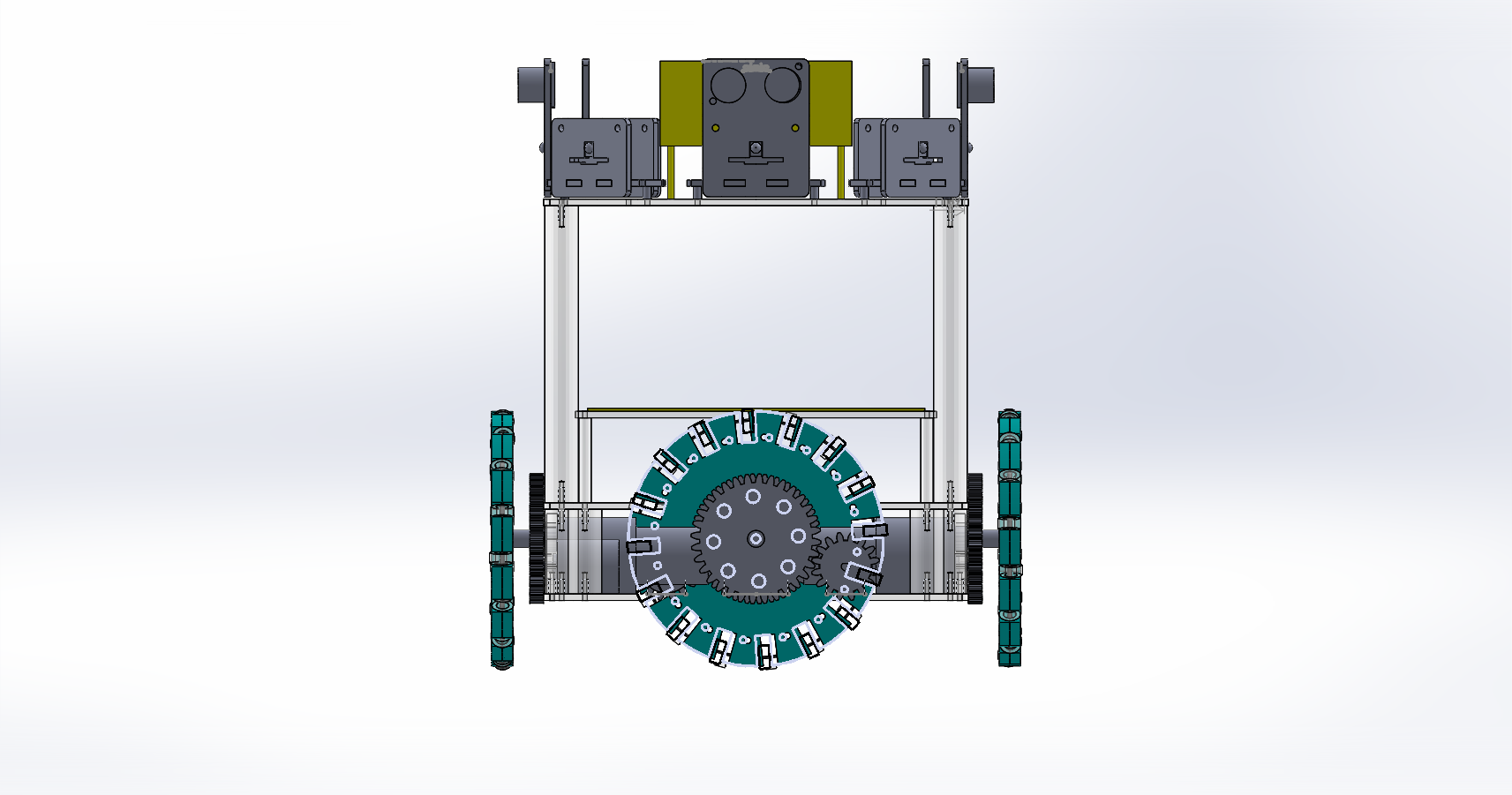 図5.側面図
図5.側面図
- 主要部品一覧
部品 個数 備考 材料 シャーシ上段 1枚 自作 アクリル シャーシ中段 1枚 自作 アクリル シャーシ下段 1枚 自作 アクリル BUS用シャーシ 1枚 自作 アクリル 支柱(140mm) 4本 自作 アクリル 支柱(40mm) 8本 自作。80mmの支柱を切削し作成。 アクリル モータ 4個 流用 エンコーダ 4個 流用 オムニホイール 4個 自作 アクリル エンコーダマウント 4個 流用 アクリル モータマウント 4個 流用 アクリル Webカメラ 3個 流用。数字認識用 超音波センサ 4個 流用 赤外線センサ 8個 購入
- 主要部品一覧
2.エレキ構成
- 開発概要
開発項目 目的・理由 方法 バス回路基板 拡張性と保守性を向上する為 バス回路基板を新規作成・PINソケットを取付 モーター制御基板 従来のモーターボードより小型の物を作成する為 モーター制御基板新規作成・各種部品取付 超音波センサ分岐基板 超音波センサの出力を纏めて扱いやすくする為 超音波センサ分岐基板新規作成・PINソケット取付 赤外線センサ制御基板 赤外線センサからの出力をArduino DUEに送信する為 赤外線センサ制御基板新規作成・各種部品取付 ロータリエンコーダ分岐基板 ロータリエンコーダの出力を纏めて扱いやすくする為 ロータリエンコーダ分岐基板新規作成・PINソケット取付 LED・赤外線センサ固定基板 LED・赤外線センサを固定する為 LED・赤外線センサ固定基板新規作成 テープLED制御基板 テープLEDを制御して光らせる為 テープLED制御基板新規作成・各種部品取付 MP3再生基板 MP3ファイルを再生する為 MP3再生基板新規作成・各種部品取付 - 構成図
構成図を以下に示す。
図6 エレクトロニクス構成図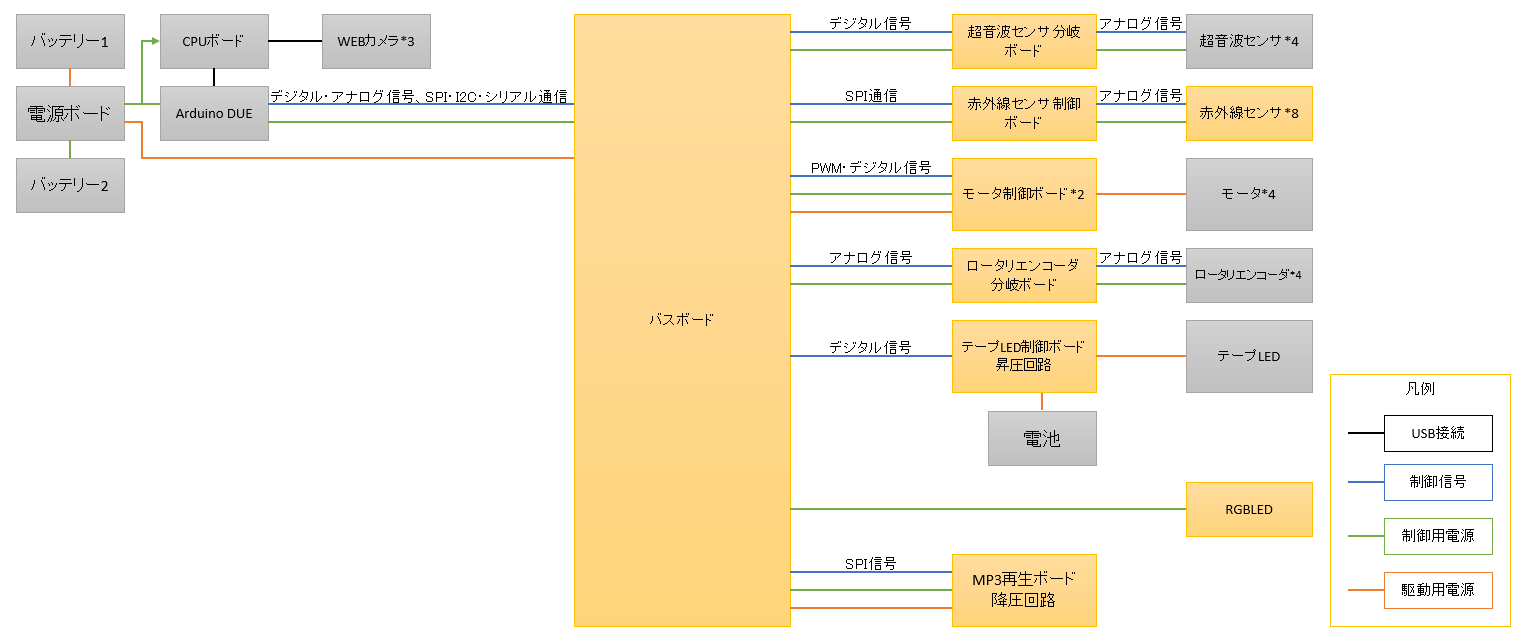
- 使用ボード一覧
ボード 内容 変更点 担当者 電源ボード 変更点なし CPUボード 変更点なし バス回路基板 Arduino DUEと各種モジュールとの通信を橋渡しする 新規作成 平山 モーター制御ボード 望月 超音波センサ分岐基板 センサからの信号をArduino DUEへ送信する基板 望月 赤外線センサ制御基板 部谷 ロータリエンコーダ分岐基板 望月 LED・赤外線センサ固定基板 LED・赤外線センサを固定する 部谷 テープLED制御基板 テープLEDの発光を制御する 部谷 MP3再生基板 .MP3ファイルを再生する 平山 Arduino DUE 新規購入 平山
3.ソフト構成
- 開発概要
開発概要を以下の表にまとめる。
開発概要 目的、理由 担当者 現場急行時のシーケンス スタート地点から数字ボード近くまで移動し数字認識を行い、成功後展示室に進入する。 打味・久保寺・諏訪 巡回、捜索 展示室内で怪盗機を探すために巡回する。巡回中に怪盗機を発見したときは怪盗機を追跡する。 打味・久保寺・諏訪 数字認識後、サーバーへ転送 数字ボードから数字を読み取り、サーバーへ数字を転送する。 久保寺 オムニホイールの制御 四輪オムニホイールの動作を制御し、進行方向の切り替えや速度制御を管理する。 諏訪 Arduinoによるセンサ類の制御 Aruduinoを用いて、赤外線センサや超音波センサの信号を処理する。 打味 CPUとArduino間の通信処理 CPUとArduinoの間で信号を共有して処理する。 打味 - モジュール構成
モジュール構成図を以下に示す。
図7 モジュール構成図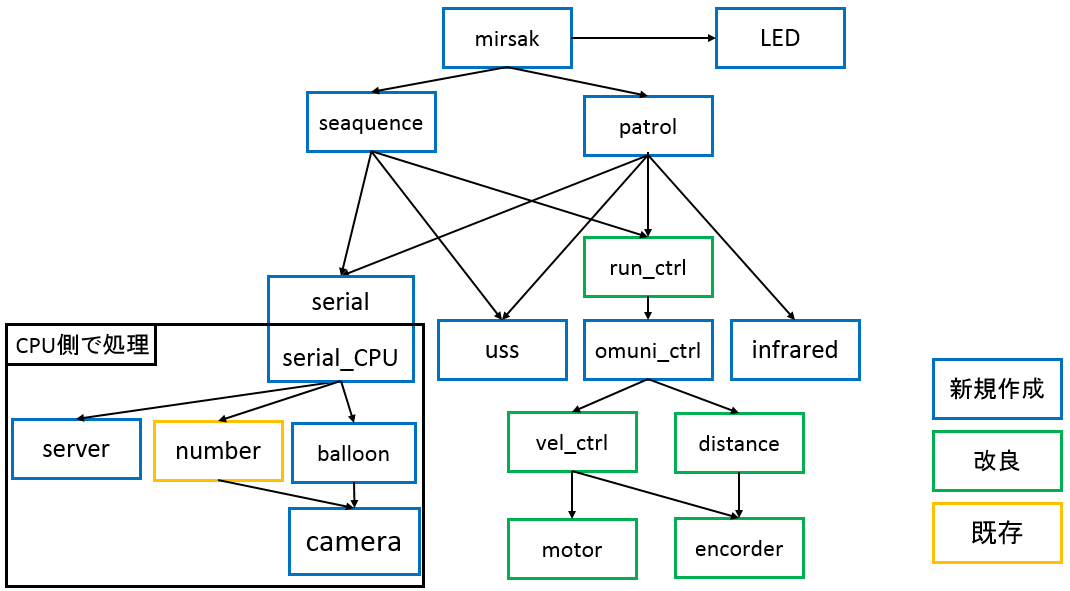
- モジュール一覧
プログラムを構成するモジュールを以下の表に示す。
モジュール名 機能 開発要素 mirsak mirs全体の動作を管理する 新規作成 seaquence スタートから数字認識までの動作を行う。 新規作成 patrol 展示室内で怪盗機を捜索する。 新規作成 number 数字認識を行う。 標準プログラムを使用。 server 認識した数字をサーバーに送る。 新規作成 balloon 怪盗機の赤い風船を認識する。 新規作成 run_ctrl 直進・方向転換 オムニホイールに対応させる。 omuni_ctrl オムニホイールを制御する。 新規作成 vel_ctrl モータの速度制御を行う。 Arduinoに対応させて改良。 motor モータを動かす。 モーターを4つに増設したため改良。 distance 走行距離を管理する。 同上 encoder エンコーダ値を管理する。 同上 serial シリアル通信を行う。 新規作成 uss 超音波センサの信号処理を行う。 新規作成 LED 装飾用LEDを制御する。 新規作成 infrared 赤外センサの信号処理を行う。 新規作成 serial_CPU CPUとArduinoの間で信号を共有して処理する。 新規作成 camera カメラを使用した処理をCPU側で処理させる。 新規作成
開発スケジュール
MIRS1601の第一段階の開発スケジュールを以下に示す。
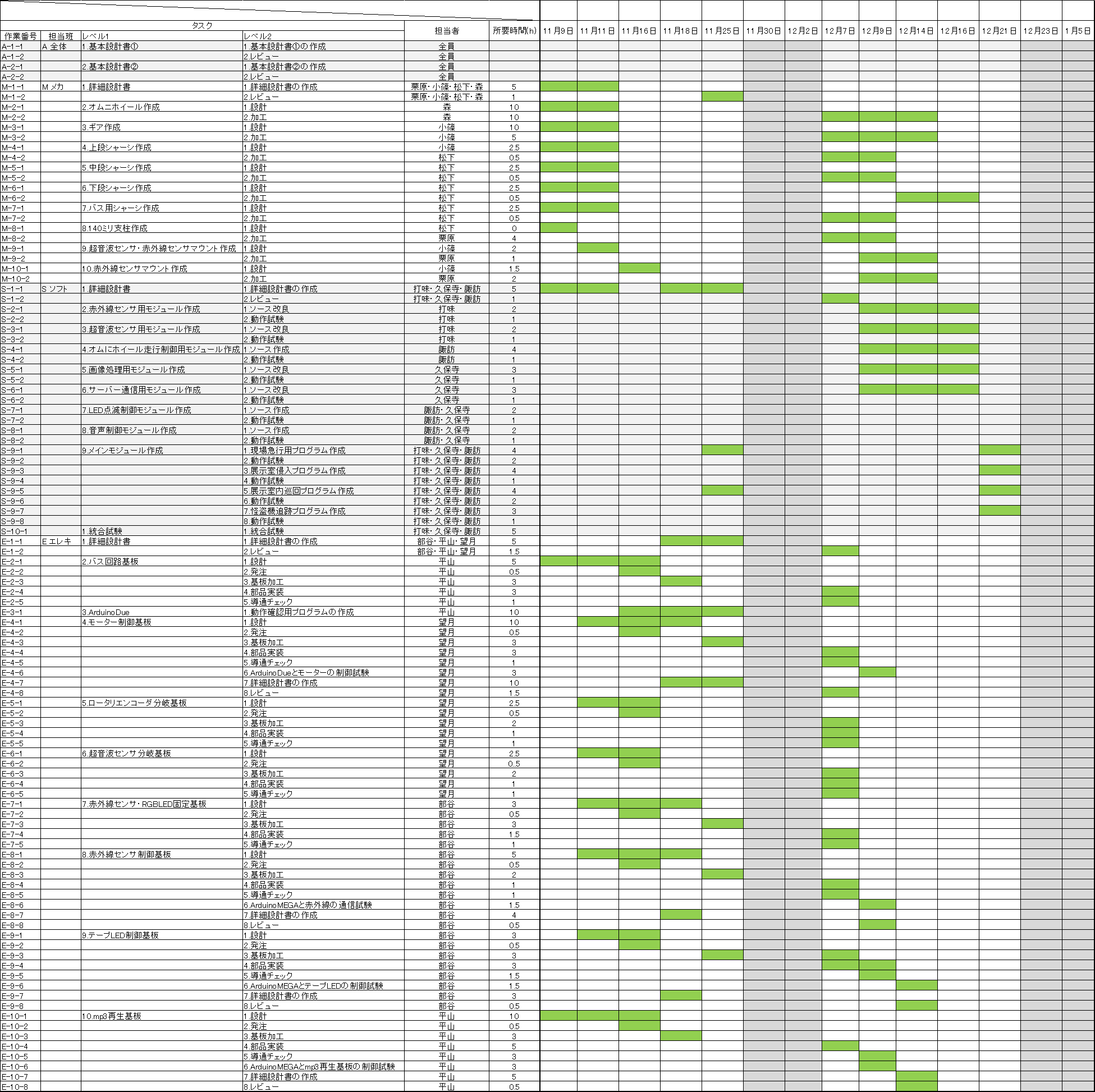
|
購入物品