�{�h�L�������g�ɂ���
�{�h�L�������g�́CMIRS1601�Ɏg�p����W�����i�Ɋւ��鎎���̕��ł���B
�쎎���Ώۈꗗ�\
�ȉ��ɁA���쎎���Ώۂ���ю����S���ɂ��Ă̈ꗗ�������B
| ��� | �����Ώ� | �������� | �����S���� | �����⏕�� | ���������� | ���l |
|---|---|---|---|---|---|---|
| �{�[�h | �h�[�^�{�[�h |
�����`�F�b�N ���ʃ`�F�b�N ����m�F |
���J | �]�� | 2016.7.8 | MIRS����@���x�� |
| ���[�^����{�[�h | ���R | �v�ێ� | 2016.7.8 | MIRS����@���ꖇ�x�� �ꖇ�V�����쐬 |
||
| �����g�Z���T�{�[�h�i�e�j | �]�� | �Ŗ� | 2016.7.8 | �u�[�X���̍ɂ��g�p | ||
| �����g�Z���T�{�[�h�i�q�j | ���J | �z�K | 2016.7.8 | �u�[�X���̍ɂ��g�p | ||
| �d���{�[�h | ���R | �]�� | 2016.7.8 | |||
| ���J���i | �V���[�V��i | �O�`���@�A���ʒu�A�傫���`�F�b�N | �X | �v�ێ� | 2016.7.1 | �V�����쐬 |
| �V���[�V���i | �X | �v�ێ� | 2016.7.8 | |||
| �o�b�e���[�{�[�h | ���� | �v�ێ� | 2016.7.6 | |||
| �o�b�e���[�{�[�h�p�̎x�� | ���� | �v�ێ� | 2016.7.6 | |||
| �x��(��) | ���� | �z�K | 2016.7.8 | |||
| USB���t���p�l�� | ���� | �z�K | 2016.7.6 | |||
| �o���p | �I�� | �Ŗ� | 2016.7.1 | |||
| ���[�^�E�G���R�[�_�}�E���g | ���� | �Ŗ� | 2016.7.8 | �V�����쐬 | ||
| �P�[�u�� | ���[�^����{�[�h�ڑ��P�[�u�� | ���ʃ`�F�b�N | �I�� | �Ŗ� | 2016.7.1 | �V�����쐬 |
| CPU�{�[�h�d���P�[�u�� | �I�� | �Ŗ� | 2016.7.1 | �V�����쐬 | ||
| �V���A���ڑ��P�[�u�� | �I�� | �Ŗ� | 2016.7.1 | |||
| �����g�Z���T�ڑ��P�[�u�� | �I�� | �Ŗ� | 2016.7.1 | |||
| 11�s���t���b�g�P�[�u�� | �I�� | �Ŗ� | 2016.7.1 | |||
| 4pin�P�[�u�� | �I�� | �Ŗ� | 2016.7.1 | |||
| 6pin�P�[�u�� | �I�� | �Ŗ� | 2016.7.1 | |||
| USB�����o���P�[�u�� | �I�� | �Ŗ� | 2016.7.1 | |||
| LAN�����o���P�[�u�� | �I�� | �Ŗ� | 2016.7.1 | |||
| �f�B�X�v���C�����o���P�[�u�� | �I�� | �Ŗ� | 2016.7.1 | |||
| PS2�����o���P�[�u�� | �I�� | �Ŗ� | 2016.7.1 | |||
| DB9�����o���P�[�u�� | �I�� | �Ŗ� | 2016.7.1 |
�W�����i�������@
�W�����i�������@��MIRS1601�W�����i�����v�揑���Q�ƂƂ���B
�W�����i��������
�W�����i�����̌��ʂ��ȉ��Ɏ����B
-
���
-
�h�[�^�[�{�[�h
-
���[�^�[����{�[�h
2.1 ���i�z�u�`�F�b�N
�����}�����Ȃ��畔�i�̔z�u���m�F�������A��v�����̂ō��i�Ƃ����B2.2 ���ʃ`�F�b�N
�p�^�[���ɉ����āA���ʂ��m�F�������Z����]���ȂƂ���ɓ��ʂȂǂ����Ă��Ȃ������̂ŁA���i�Ƃ����B2.3 ���쎎��
2.3.1 ���[�^�[�̐��]�A�t�]�M���̊m�F
PWM �}64�̐M���� MIRSMG3G�@���[�^����{�[�h�����d�l���A�h4.�������@�h �̎����}(fig.1)�̑���ʒu�ɂ���FET�̏o�͕����𑪒肵���B
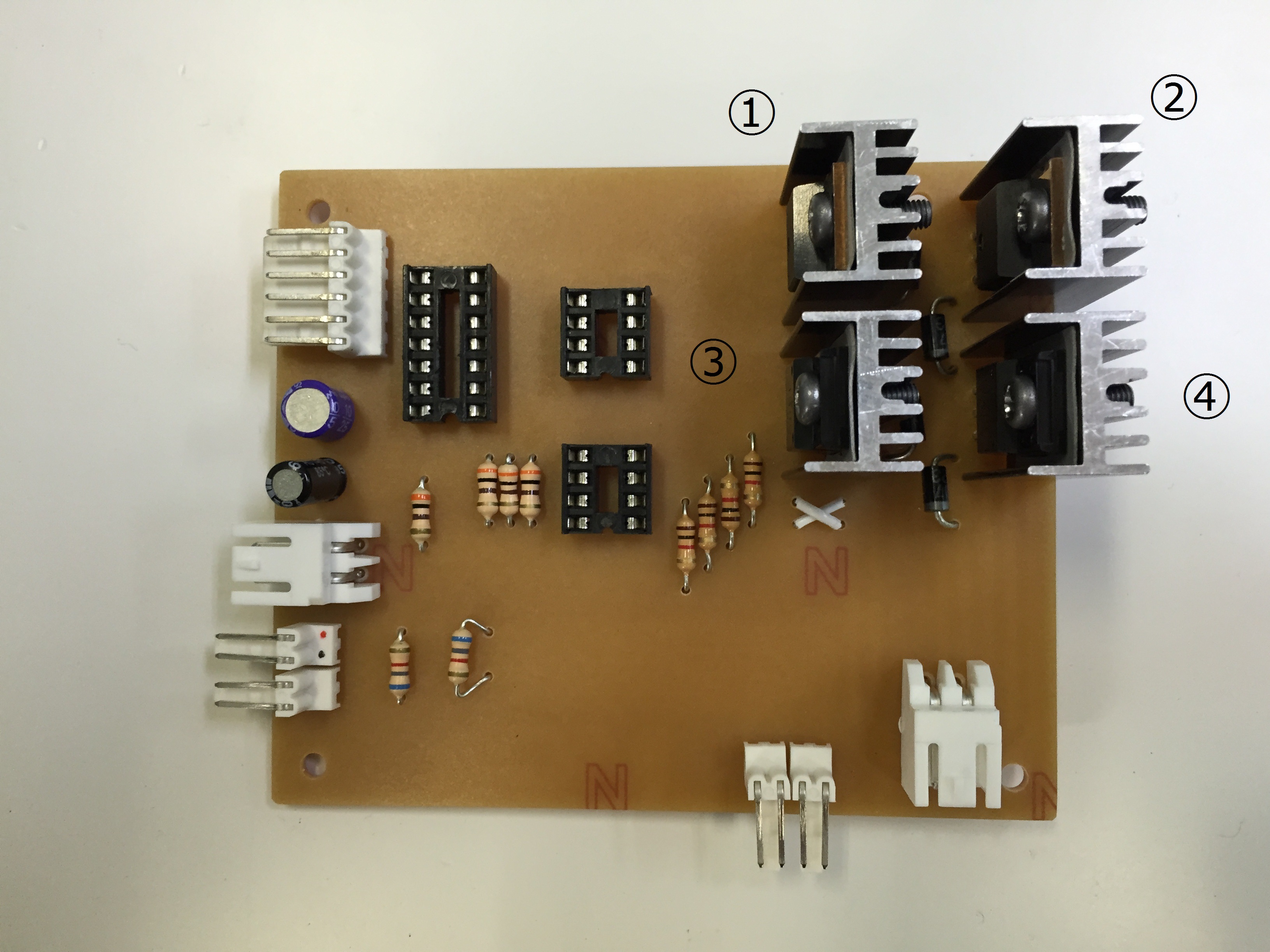
fig.1:������}
fig.2~fig.5�Ɋm�F���ꂽ�M���̔g�`�������B
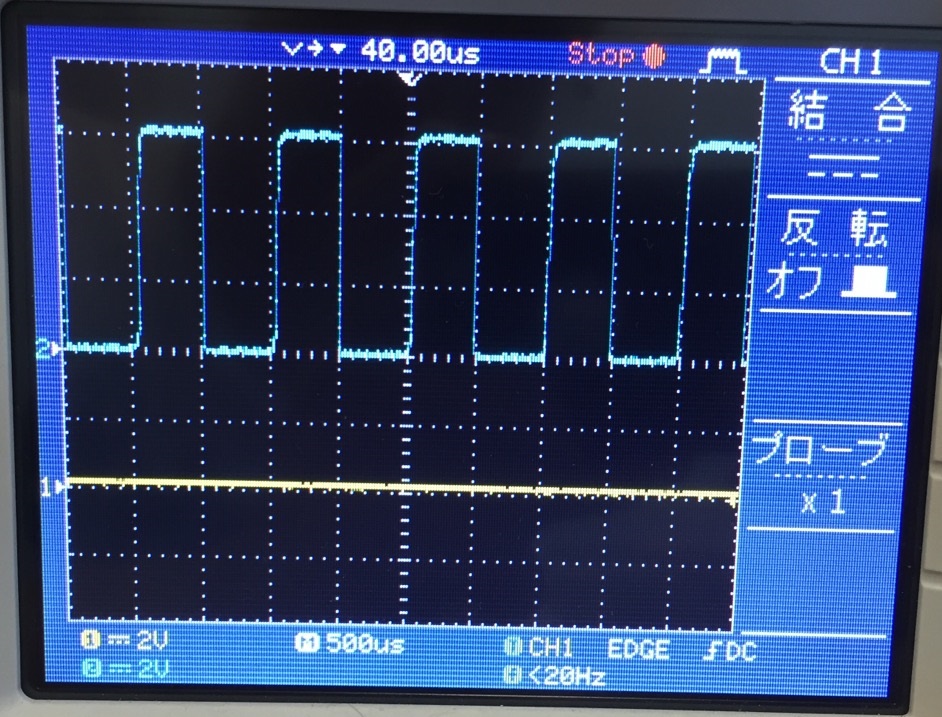
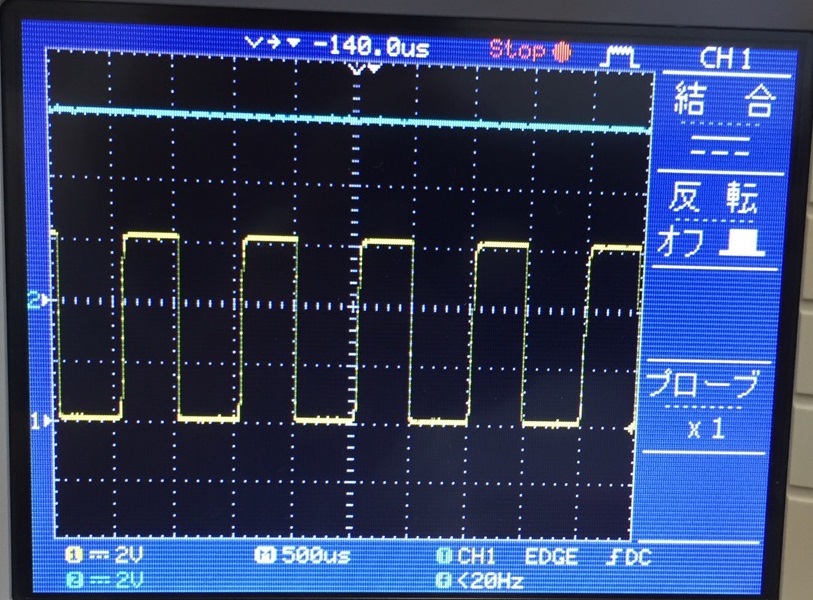
fig.2:���]�M���@����ʒu�@�A�A�̔g�` fig.3:���]�M���@����ʒu�B�A�C�̔g�` 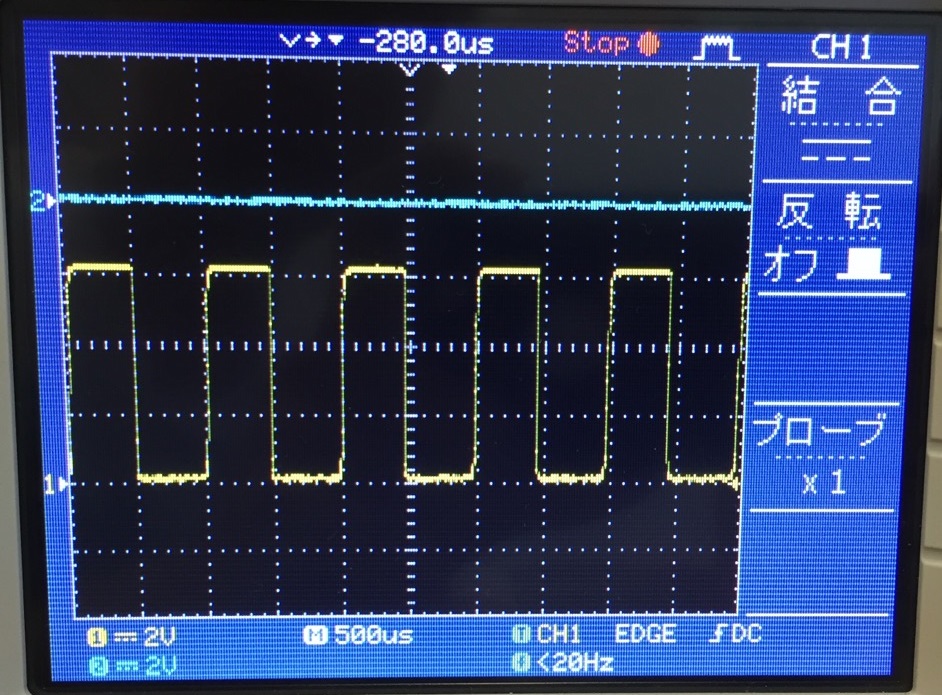
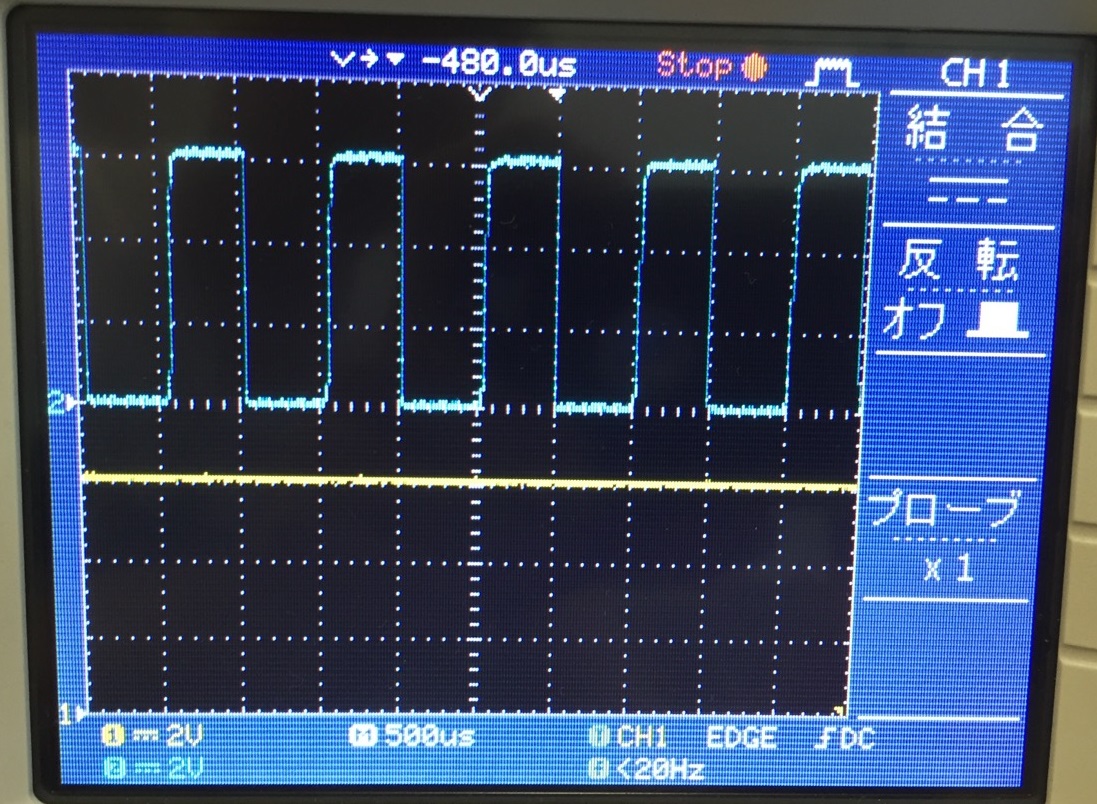
fig.4:�t�]�M���@����ʒu�@�A�A�̔g�` fig.5:�t�]�M���@����ʒu�B�A�C�̔g�`
fig.2,fig.4�̃`�����l��1���@�A�`�����l��2���A�Afig.3,fig5�̃`�����l��1���B�A�`�����l��2���C�ł���B
���]�̂Ƃ�����ʒu�A�A�B��PWM�M���A�@��0V�A�C��6V�̓d�����o�͂���Ă��邱�Ƃ��m�F�ł����B
�t�]�̂Ƃ�����ʒu�@�A�C��PWM�M���A�A��0V�A�B��6V�̓d�����o�͂���Ă��邱�Ƃ��m�F�ł����B
2.3.2 PWM�M�����g���̊m�F
fig.2~fig.5�̔g�`�ɂ��A��1kHz�̒Z�`�g���m�F�ł����B
2.3.3 ���[�^�[�̐��]�A�t�]�̊m�F
�ڎ��ɂ��m�F�ł����B
2.3.4 PWM�l�ύX�ɂ�郂�[�^�[��]���x�̕ω�
PWM�l��傫������Ƒ�����]���邱�Ƃ��A�ڎ��ɂ��m�F�ł����B
2.3.5 FET�̔��M
4���ԃ��[�^�[���ő�o�͂ʼn�]�����������M�͂Ȃ������B
2.3.6 ���[�^���G���R�[�_�̃J�E���g�̊m�F
���]�A�t�]������Ƃ��ꂼ�ꐳ�A���̃J�E���g�����邱�Ƃ��m�F�ł����B
2.3.7 ���[�^���G���R�[�_�̃J�E���g�̐��`��
���[�^���G���R�[�_���P��]�������1460�A2��]�������2920�ƒl���o�͂����B
�������A���̒l�ɂ͌덷������A�{���̓��[�^���G���R�[�_�̕���\360P/R�ɂS���{��H�łS�{�o�͂���Ă���̂ŁA�P��]�������1440�A�Q��]�������2880�Ƃ����l���o�͂���͂��ł���B
�����A��ő��肵�����Ƃ��l������ƁA�����l����͐��`�����ۂ���Ă���ƍl������B
-
�����g�Z���T�[�{�[�h
-
�d���{�[�h
1.1 ���i�z�u�`�F�b�N
�����}�����Ȃ��畔�i�̔z�u���m�F�������A��v�����̂ō��i�Ƃ����B1.2 ���ʃ`�F�b�N
�p�^�[���ɉ����ē��ʂ��m�F�������A�Z����]���ȂƂ���ɓ��ʂȂǂ͂��Ă��炸�A�R�l�N�^����R�l�N�^�܂ł̓��ʂ��ł��Ă����̂ŁA���i�Ƃ����B
3.1 ���i�z�u�`�F�b�N
�����}�A�������i�ꗗ�����Ȃ��畔�i�̔z�u���m�F�������A��v�����̂ō��i�Ƃ����B3.2 ���ʃ`�F�b�N
�p�^�[���ɉ����āA���ʂ��m�F�������Z����]���ȂƂ���ɓ��ʂȂǂ����Ă��Ȃ������̂ŁA���i�Ƃ����B3.3 ���쎎��
�e�X�g�v���O�����ɂē��쎎�����s�����̌��ʂ��ȉ��Ɏ����B
����l�̕��ςƎ����l�̌덷�͈͓��Ɏ��܂����̂ō��i�Ƃ���B
�ŒZ���苗����22cm�ł������B
�����l[cm] �e�@����l[cm] �q�@����l[cm] 22 22 22 30 29 32 40 41 43 50 50 52 60 59 62 70 71 73 80 80 81 90 92 94 100 101 104 125 126 128 150 151 153 175 175 177 200 201 203 Table.2 �����g�Z���T�������� 4.1 ���i�z�u�`�F�b�N
�����}�����Ȃ��畔�i�̔z�u���m�F�������A��v�����̂ō��i�Ƃ����B4.2 ���ʃ`�F�b�N
�p�^�[���ɉ����āA���ʂ��m�F�������Z����]���ȂƂ���ɓ��ʂȂǂ����Ă��Ȃ������̂ŁA���i�Ƃ����B4.3 ���쎎��
�e�X�g�v���O�����ɂē��쎎�����s�����B���̌��ʂ��ȉ���Table.3�Ɏ����B
7.40V 8.50V CPU 5.433 5.433 ���[�^�[ 6.18 6.18 Table.3 �d���{�[�h���쎎������
Table.3��萧��n�d���A�쓮�n�d���Ƃ��ɓ��͓d��7.40~8.50V�ɑ���o�͓d���̒l�����ꂼ��5.1~5.6V�A6.1~6.7V�͈͓̔��ł���B
4.4 �ڑ�����
�e�X�g�v���O�����ɂē��쎎�����s�����B���̌��ʂ��ȉ���Table.4�Ɏ����B
7.40V 8.50V CPU 5.414 5.417 ���[�^�[(�ᑬ) 6.18 6.19 ���[�^�[(����) 6.13 6.12 Table.4 �d���{�[�h���쎎������
Table.4�̃��[�^�[�̒ᑬ��PWM�l20�A������PWM�l127�œ��삳�����B
�\��萧��n�d���A�쓮�n�d���Ƃ��ɏo�͓d����5.5V���Ă����B
-
-
���J���i
���@�덷���K��͈͓̔��ł���A���i�̌����Ȃǂ����Ȃ��s�����ׁA���i�Ƃ����B
-
�P�[�u��
�P�[�u���̓��ʂ��e�X�^�[�Ŋm�F�����B �܂��A�ׂ荇���s���̓��ʂ��Ȃ����Ƃ��A�e�X�^�[�Ŋm�F�����B �ȏ�������č��i�Ƃ����B