本ドキュメントについて
本ドキュメントは,MIRS1301の解体報告書である。機体解体は2016.5.6に行なわれた。
解体作業の担当
以下に、解体作業の担当についての表を示す。
| 担当箇所 | 担当者 |
|---|---|
| 機体解体 | 打味悠斗、久保寺智哉、小篠凌大 |
| 解体部品分類 | 栗原健彰、部谷若菜、森麻浦 |
| ドキュメント読み込みによる機体工夫点の確認作業 | 諏訪尚也、平山龍弥 |
| 本ドキュメント作成 | 打味悠斗 |
全体図
以下に、MIRS1301の機体全体図を示す。
MIRS1301は、プレ競技会、ポスターコンペティション、MIRS競技会、競技会アンケート各種で全て1位を取り、優勝した班である。
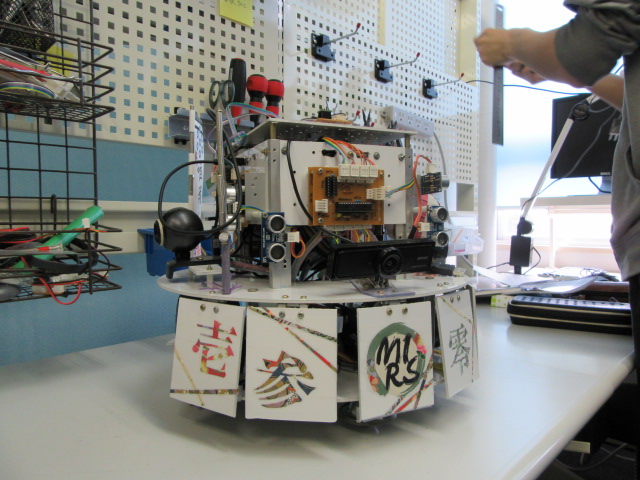
Fig.1 MIRS1301の機体
解体手順
機体は上から順に解体していった。
まず機体上面にあった電子コンパスを取り外した。
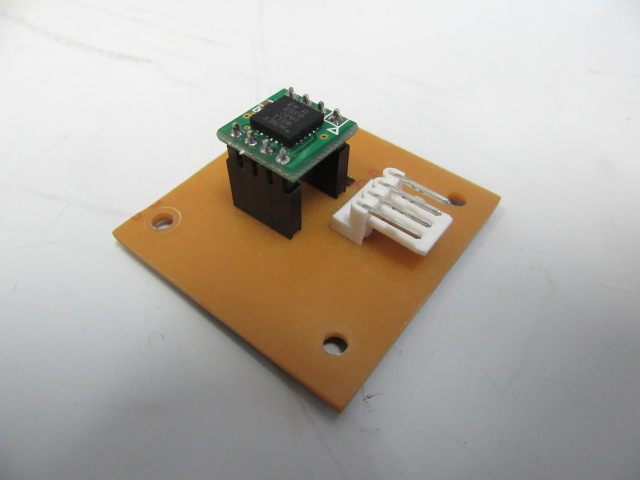
Fig.2 電子コンパス
その後、機体上面の蓋を開け、中がどうなっているかの確認を行なった。
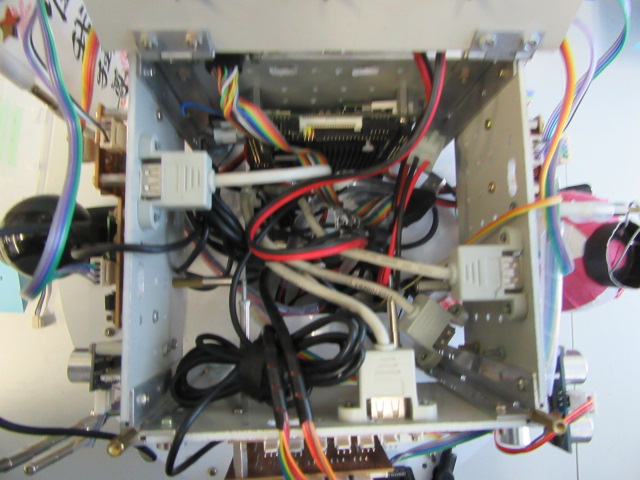
Fig.3 機体内部の構造
CPUボードからの配線などが内部にまとめてあり、不具合等あった場合には上面を開いて確認できる構造になっていた。
次に、機体側面にあった装飾用の提灯を取り外し、解体した。
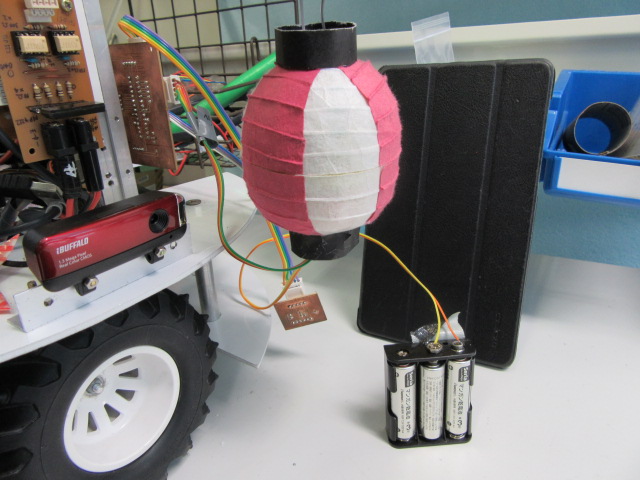

Fig.4,5 装飾用提灯
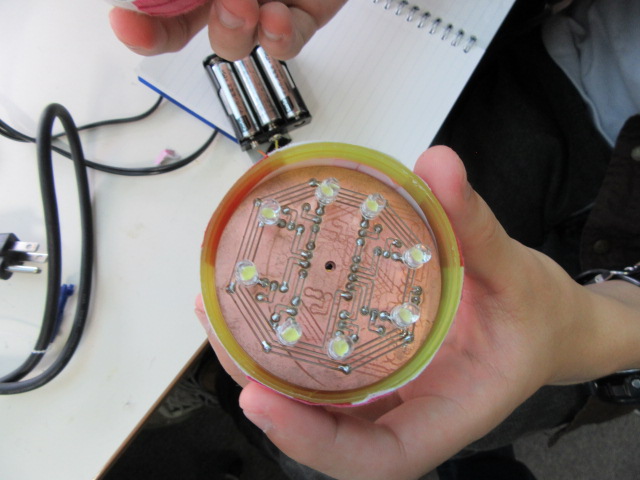
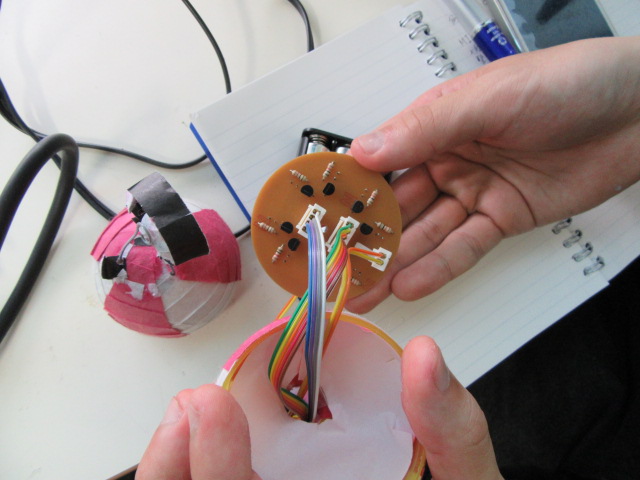
Fig.6,7 装飾用提灯の内部
提灯の内部にはLEDを光らせる為の基板があり、本体からのI2C通信の指令によって点灯/消灯の制御を行なっていたようだ。
次に、機体前面と両側面に設置されていたWebカメラを取り外した。



Fig.8,9,10 Webカメラ(左側面、前面、右側面)
前面のWebカメラのみ、少し下方を向くように設置されていた。
次に、側面から基板を外していった。
まずはモータ制御ボードとモータ駆動ボードを取り外した。
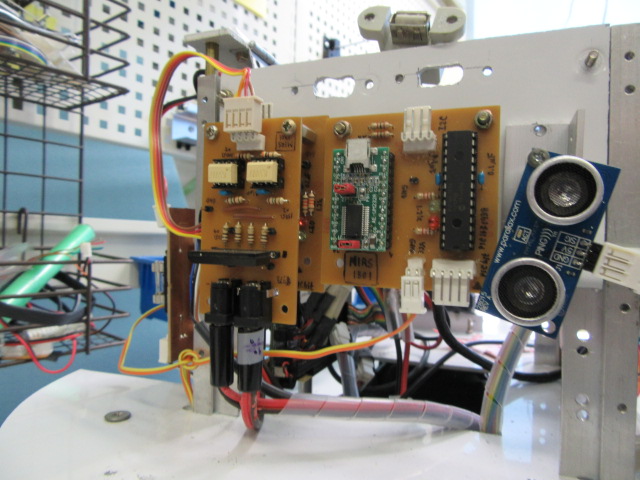
Fig.11 機体側面(1)
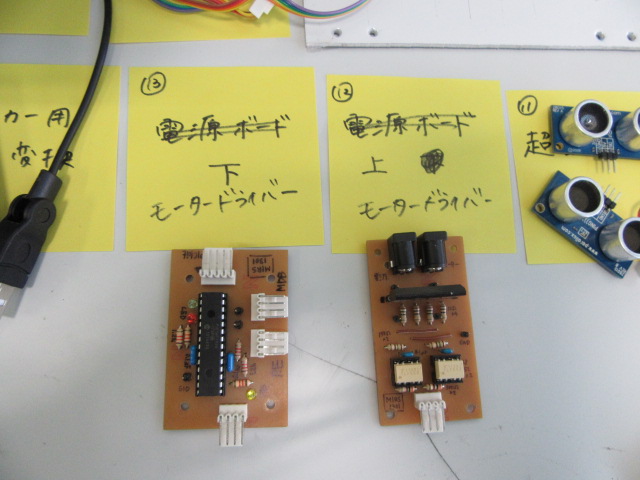
Fig.12 モータ制御ボード(左)とモータ駆動ボード(右)
モータ制御ボードで制御できるモータは1つなので、反対側にも同じ基板が設置されていた。
次に、Fig.11のモータ制御ボードの左側にあるI2Cマスターボードを取り外した。

Fig.13 I2Cマスターボード
この基板は、MIRS1301だけでなく、1303、1304も使用していた。
-> MIRS1301-ELEC-0002
次に、超音波センサを取り外した。
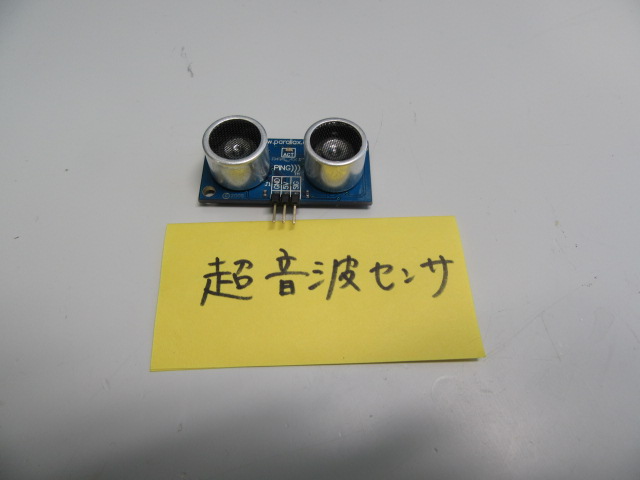
Fig.14 超音波センサ
超音波センサは前面に2つ、両側面に1つずつ、合計4つ搭載されていた。
次に、機体前面から基板を外していった。
前面にはUSSボードと、A/D変換ボードが設置されていた。
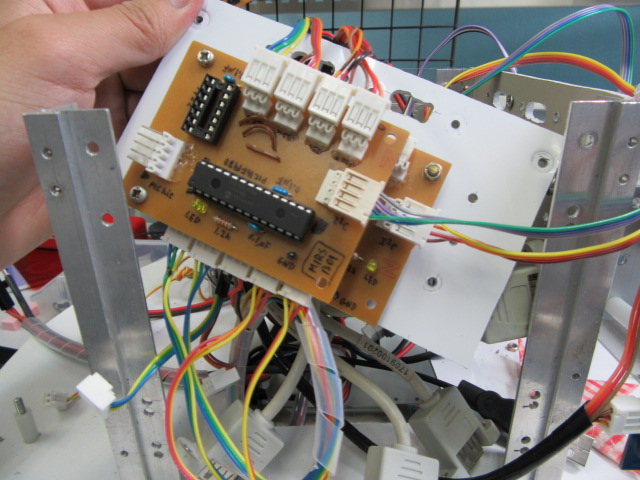
Fig.15 機体側面
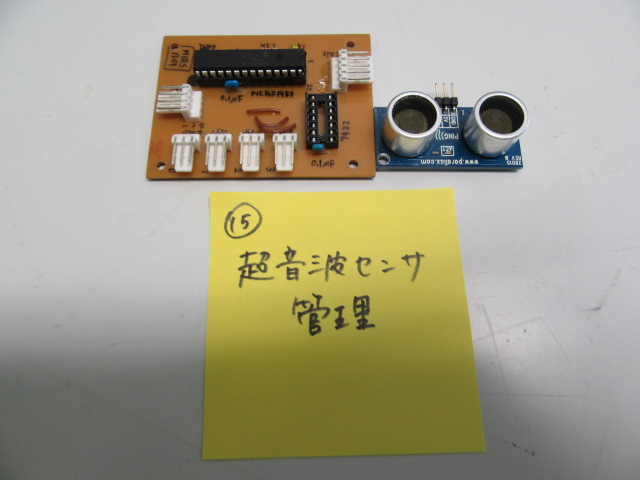
Fig.16 USSボード
このボードは超音波センサをI2Cによって制御できるボードで、1枚で4つのセンサが使用可能である。

Fig.17 A/D変換ボード
このボードは機体前面に設置されていたバンパのタッチセンサと繋がっていた。
次に、機体背面のボードを取り外した。
背面には電源ボードとLEDボードが設置されていた。
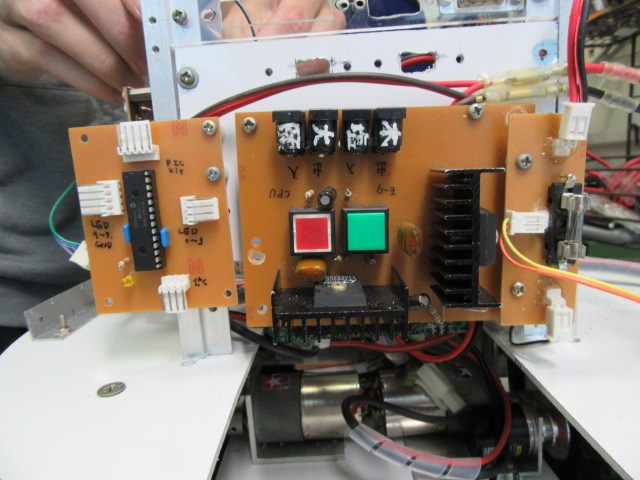
Fig.18 機体背面
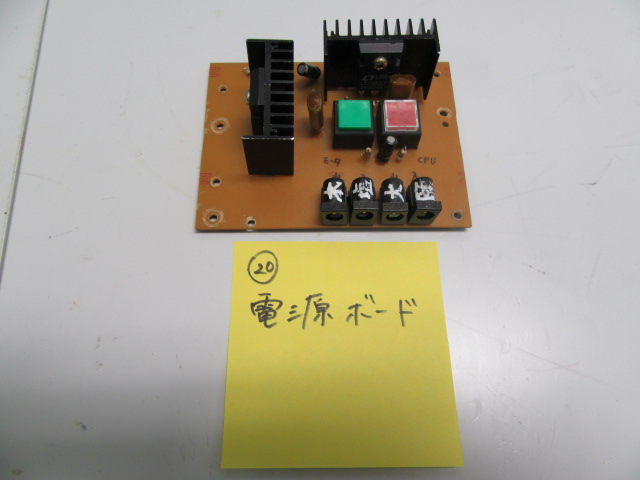
Fig.19 電源ボード
電源ボードは標準部品のひとつである。

Fig.20 LEDボード
このボードは提灯の明かり用に作成されたものである。
その後、側面のパネルを取り外し、機体下部のみにした。
シャーシ下部には、タッチセンサ、モータ、ロータリエンコーダが設置されていた。

Fig.21 機体下部

Fig.22 タッチセンサ
タッチセンサは全部で5個設置されており、全てがスパイラルチューブで束ねられていた。

Fig.23 モータとロータリエンコーダ
モータの情報は、プーリで同期してロータリエンコーダで読み取れるようになっていた。
その他の部品も解体して解体作業は終了した。
最後に、解体した部品全てを並べた図を示す。
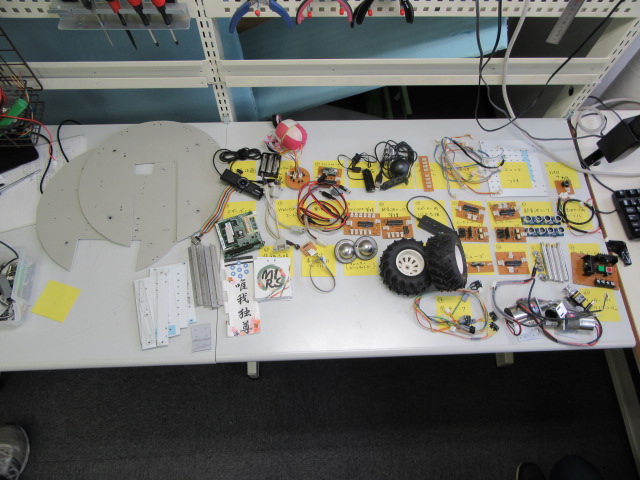
Fig.24 解体部品
MIRS1301の機体工夫点・改善点
MIRS1301について、解体中に気づいた特徴を以下にまとめる。
- メカニック部分
- 機体上部の蓋はスペーサによって少し間が開いていたが、これは機体内部の熱を逃がすための工夫だと考えられる。
- エレキ部分
- ケーブルの接続ミスを防ぐため、基板のGNDの位置を統一したり、コネクタの方向を揃えたりしてあった。
- 超音波センサが前に2つ、側面にそれぞれ1つ付いており、正確な距離の測定に貢献できるようにしていた。
- カメラを正面と左右に設置することで、より広い範囲を同時に確認することができるようにしていた。
- その他の配慮、工夫
- 配線が邪魔にならないよう、できるだけ機体内部の中央へ集まるようになっており、スパイラルチューブで1本にまとめられていた。
- 作製者以外でも基板のピンがどのピンなのか理解できるように基板にピンの名前が書いてあった。
また、MIRS1301のドキュメント[外部リンク]に記載してあった工夫点を以下にまとめる。
- メカニック部分
- 2013年のMIRSの標準機は六角形だったが、円形のシャーシを使用し、壁や障害物に引っかかる可能性、頻度を減らした。
- 上段シャーシの中央を大きく切り取り、下段の基板の整備性を向上させた。
- 全側面のシャーシにΦ3の穴を格子状に15mm間隔で開けることで、基板の位置を調整しやすいようにし、さらにサイズの規格化を成功させた。
- アルミ複合版を使用することにより、機体の軽量化を図った。
- CPUボード、FPGAボードを垂直に設置することで、省スペース化を図った。
- エレキ部分
- コネクタの方向を統一し、間違いやヒューマンエラーを減らした。
- I2Cマスターボードを追加し、FPGAボード、ドータボードを使用しなくなった。
- PICkit2/3をプログラム書き換えのときに用いるため、PIC基板に専用のコネクタを用意し、プログラム書き込み時の時間短縮、PICの破損を回避するようにした。
- 電子コンパスを搭載することにより、自己位置の推定がさらに正確になった。
- その他の配慮、工夫
- USBスピーカを搭載し音を鳴らすことで、エンターテイメント性を向上させた。
- 機体正面にオートフォーカス機能つきのカメラを用意することで、相手までの距離の測定をより確実に行なえるようにした。
MIRS1301の機体には上記のような工夫が施されており、細かい部分においても班の中での共通認識とすることや、それぞれの機能の拡張・追加を行なっていくことで、優勝へこぎつけたのではないだろうか。
標準部品表
以下に、必要な標準部品数と使用可能な標準部品数を示す。
| 種類 | 部品名 | 個数 | 確認個数 | 備考 |
|---|---|---|---|---|
| ボード | CPUボード | 1 | 1 | |
| FPGAボード | 1 | 1 | 予備のボードを補給 | |
| ドータボード | 2 | 1 | MIRS2015で変更、1枚で2つのモータ、6つのタッチセンサが処理できるボードをMIRSMG3G試作機から補充 | |
| モータ制御ボード | 2 | 2 | MIRS2015で変更、MIRSMG3G試作機から補充 | |
| 超音波センサボード(親) | 1 | 1 | ブースより在庫を確認 | |
| 超音波センサボード(子) | 1 | 1 | ブースより在庫を確認 | |
| 電源ボード | 1 | 1 | ||
| メカ部品 | シャーシ(上段) | 1 | 1 | MIRS2015で変更、ブースより在庫を確認 |
| シャーシ(下段) | 1 | 1 | MIRS2015で変更、ブースより在庫を確認 | |
| 支柱(丸)大 | 4 | 4 | MIRS2015で変更、ブースより在庫を確認 | |
| 支柱(丸)小 | 4 | 4 | MIRS2015で変更、バッテリー固定台用、MIRSMG3G試作機より補充 | |
| USB取り付けパネル | 1 | 1 | ||
| PS/2 LAN 取り付けパネル | 1 | 0 | 使用しない | |
| VGA取り付けパネル | 1 | 0 | 使用しない | |
| バンパ | 3 | 3 | 前方正面、前方右、前方左 | |
| モータ・ギア | 2 | 2 | ブースより在庫を確認 | |
| ロータリエンコーダ | 2 | 2 | ||
| タイヤ・ホイール | 2 | 2 | ||
| モータ・エンコーダ取り付け金具 | 2 | 0 | MIRS2015で変更、作成予定 | |
| ボールキャスター | 2 | 2 | ||
| センサ・カメラ | タッチセンサ | 3 | 5 | |
| Webカメラ | 1 | 1 | ||
| ケーブル(信号系) | 超音波センサ接続ケーブル | 1 | 1 | DB9-USS親機の接続ケーブル |
| 11ピンフラットケーブル | 2 | 2 | FPGA-DB | |
| 4pinケーブル | 3 | 7 | USS-USSx3 | |
| 6pinケーブル | 2 | 6 | DB-MPC2x2 | |
| USB引き出しケーブル | 1 | 2 | ||
| LAN引き出しケーブル | 1 | 0 | 使用しない | |
| ディスプレイ引き出しケーブル | 1 | 1 | ||
| PS2引き出しケーブル | 1 | 0 | 使用しない | |
| DB9引き出しケーブル | 1 | 1 | ||
| ケーブル(電源系) | CPUボード電源ケーブル | 1 | 0 | 作成予定 |
| モータ制御ボード接続ケーブル | 2 | 0 | 作成予定 | |
| バッテリ接続ケーブル | 2 | 2 | ||
| その他 | USB無線LANアダプタ | 1 | 1 | |
| 無線キーボード、USBアダプタ | 1 | 0 | 支給予定 | |
| 無線マウス、USBアダプタ | 1 | 1 | ||
| バッテリー充電器 | 1 | 3 | ||
| バッテリー | 2 | 5 | ||
| コンパクトフラッシュメモリ | 1 | 1 | 要返却(CPUボードに装着) |
所感
MIRS1301の機体はコンパクトで、中身のケーブルは多いものの、上記工夫点にもあるようにまとめられており、解体もしやすかった。
特に機体で不都合のある点はなく、I2Cによる制御を追加するなど大きな改善も見られた。
解体時にはそれぞれ解体した部品をすぐに分けることで今後確認していくうえでわかりやすくすることはできたものの、解体報告書の作成で時間をとられてしまい、その点だけが今回の反省すべき点だと思われる。
これからの作業では、ドキュメント作成についても考慮しながら進めていきたい。