table1:エレキ製作物一覧
| 名称 | 完成度 | ドキュメント | 個数 | 担当者 |
|---|---|---|---|---|
| 信号処理ボード | 100% | 信号処理ボード詳細設計書 | 1 | 飯塚直紀 |
| モーター制御ボード | 100% | MIRSMG3G モーター制御ボード詳細設計書 | 1 | 飯塚直紀、遠藤幸一郎 |
| ケーブル | 100% | MIRSMG3G モータ制御ケーブル手順書 | 4 | 遠藤幸一郎、田中宏明 |
| FPGAボード(プログラム変更) | 100% | MIRSMG3G FPGA回路変更説明書 | 遠藤幸一郎、天野南月 |
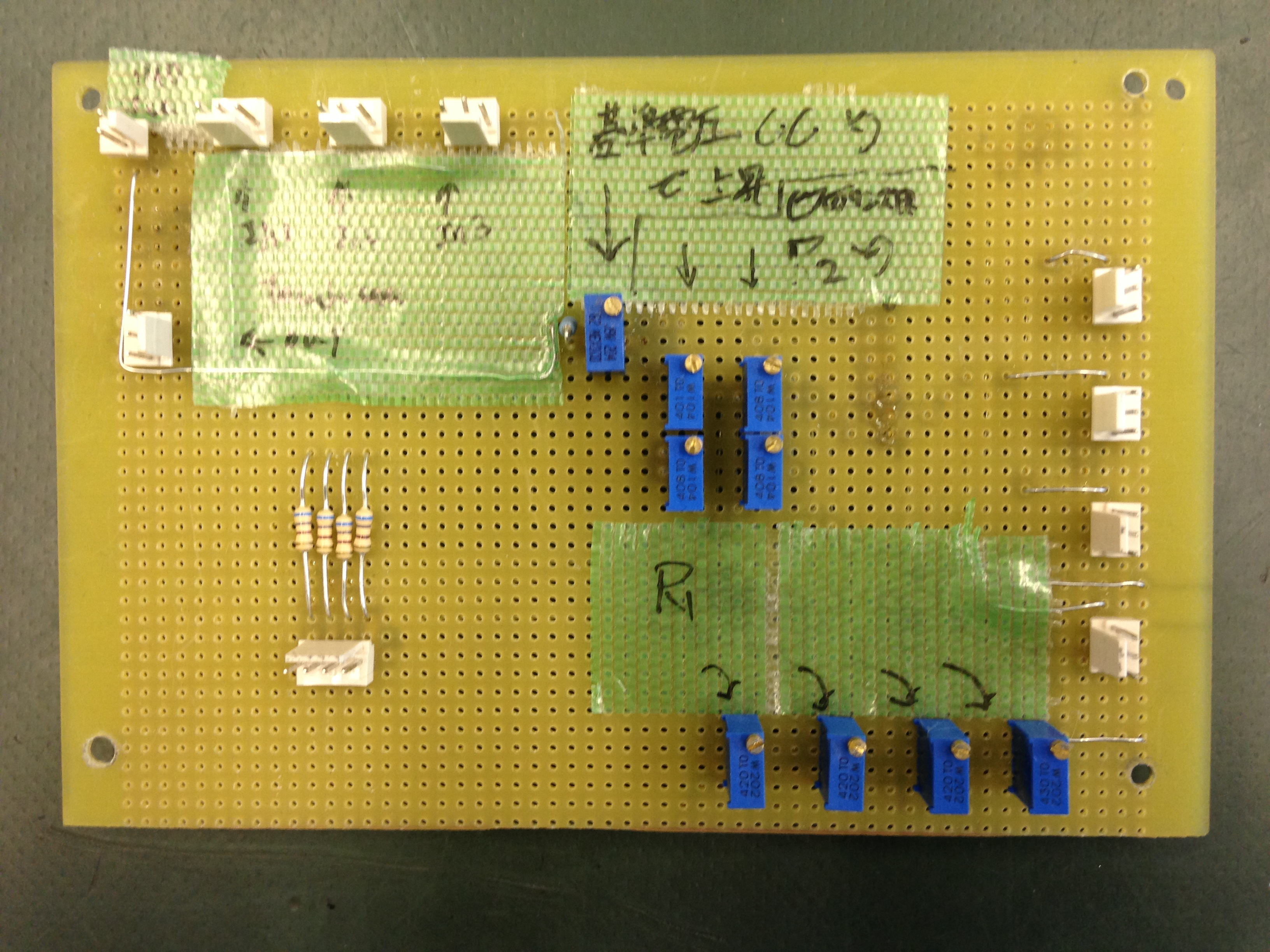
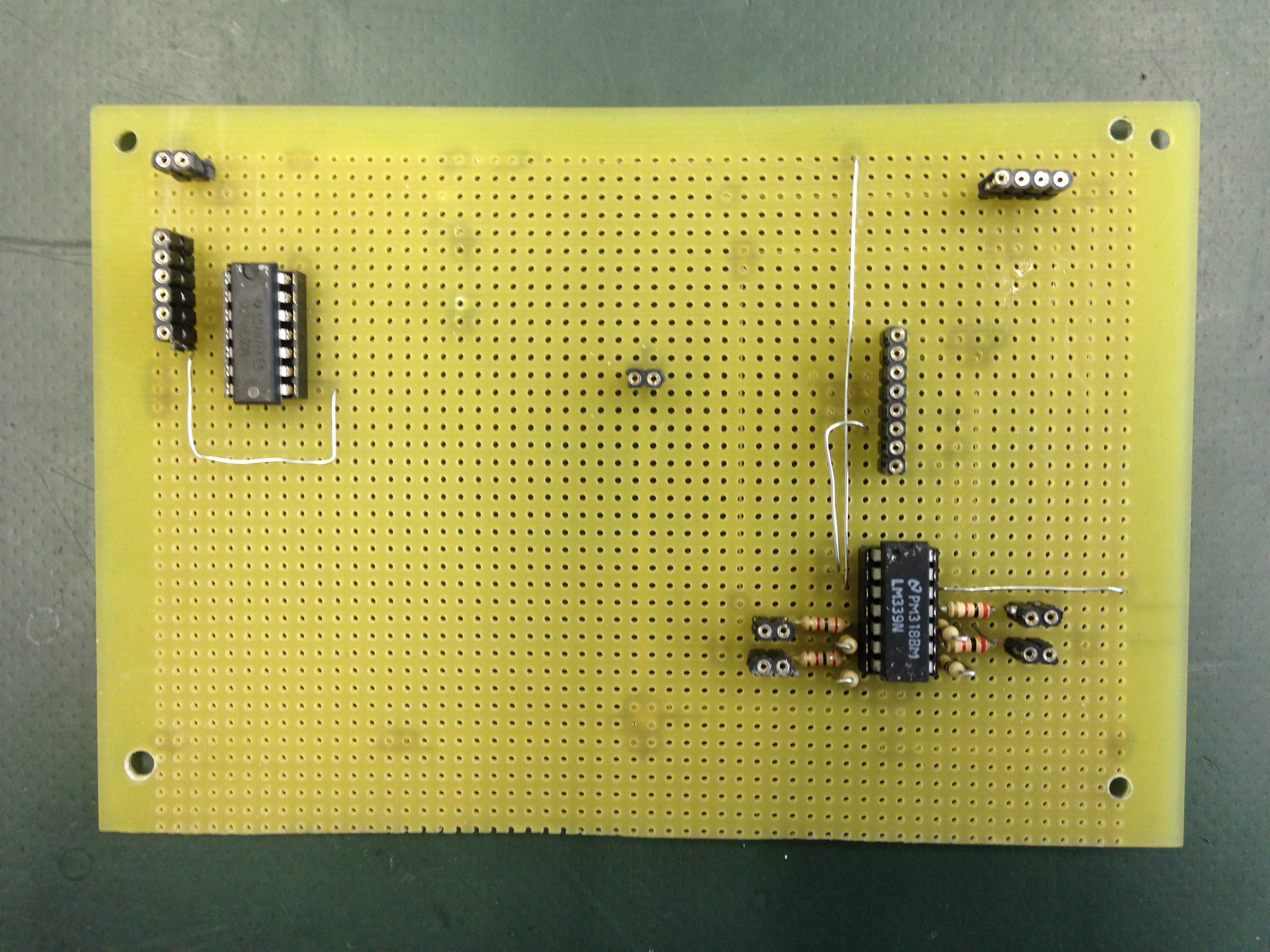
・信号処理ボード
 |
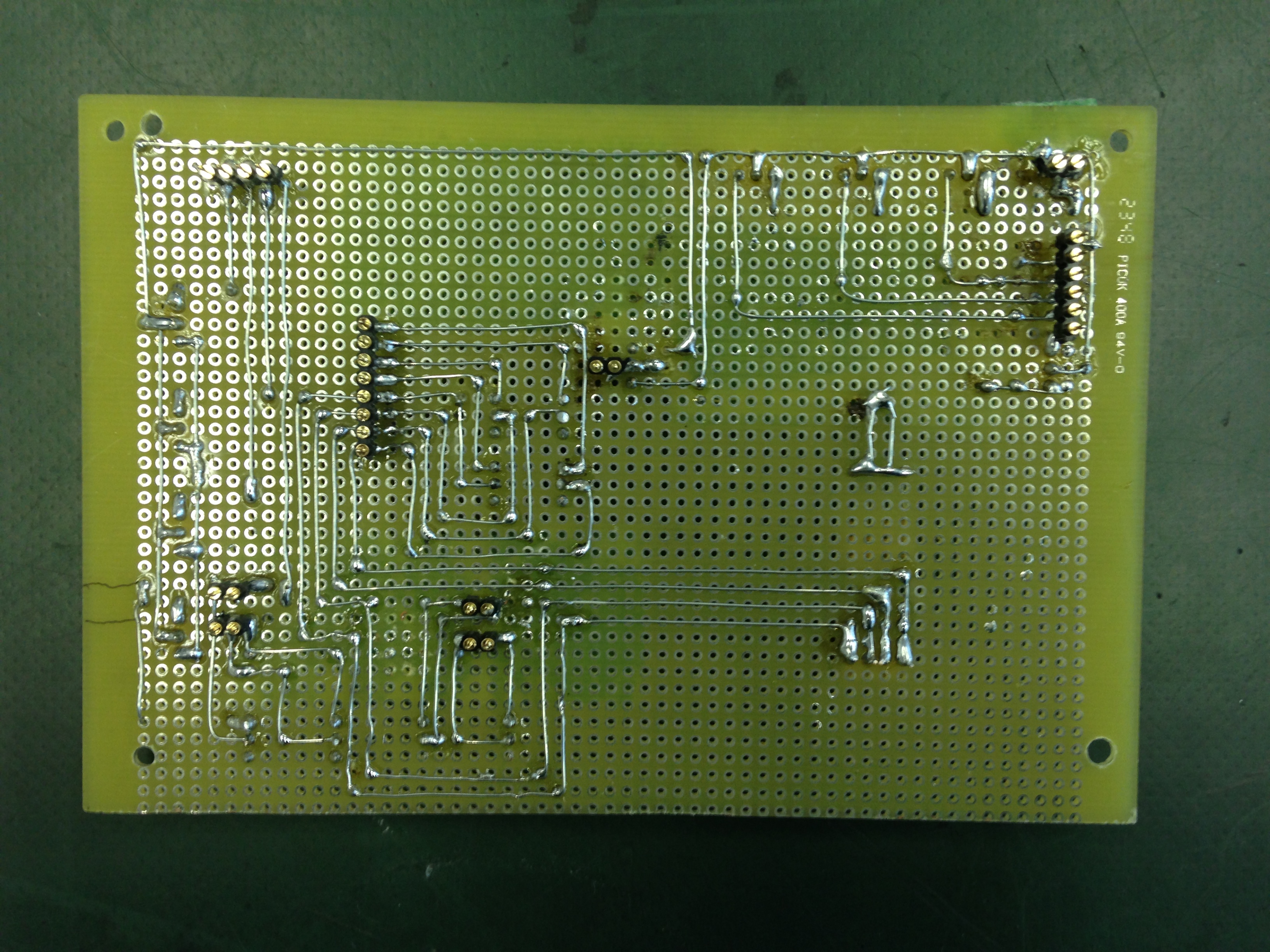 |
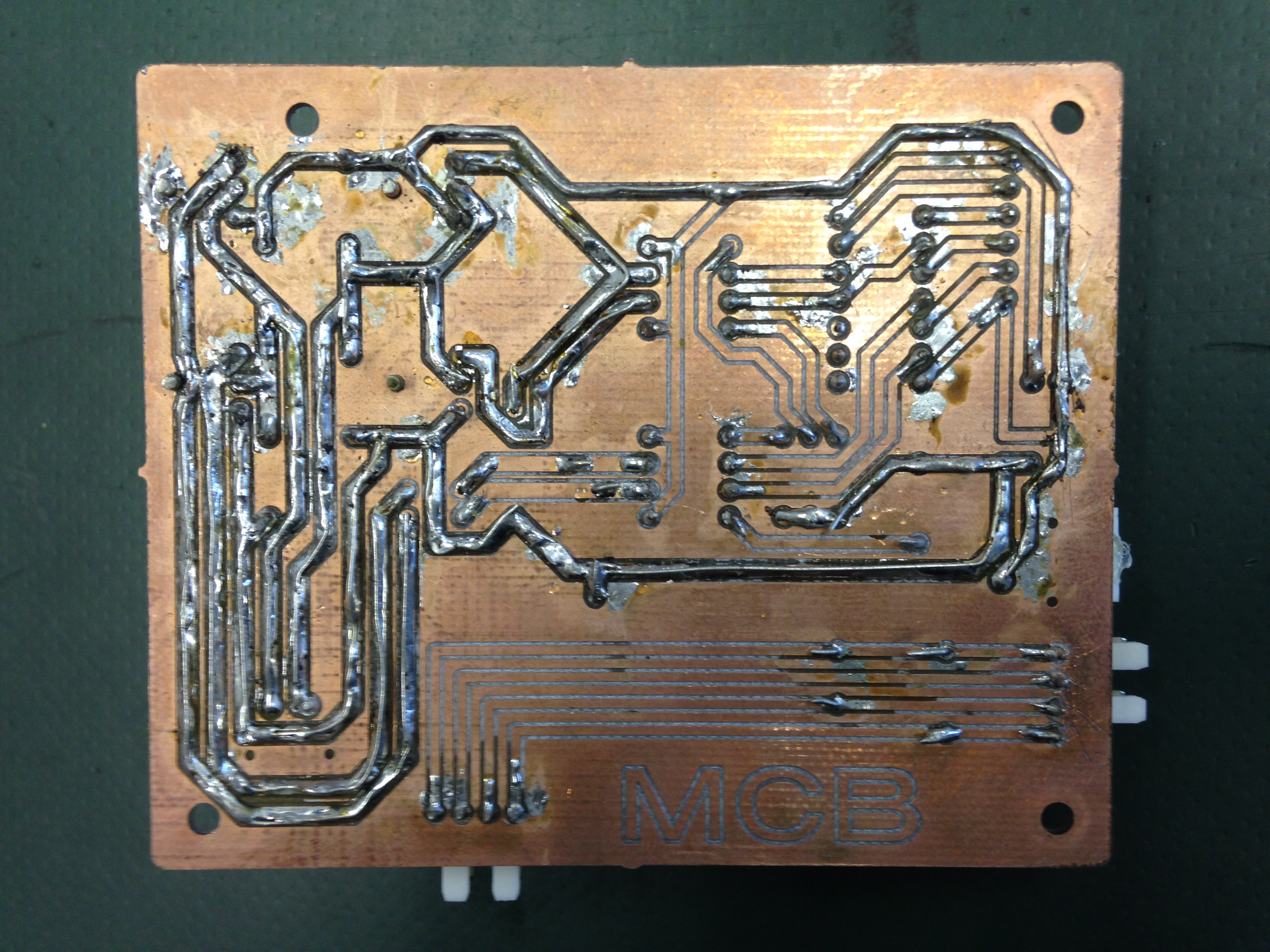
| Fig.1:上段表写真 | Fig.2:上段裏写真 |
 |
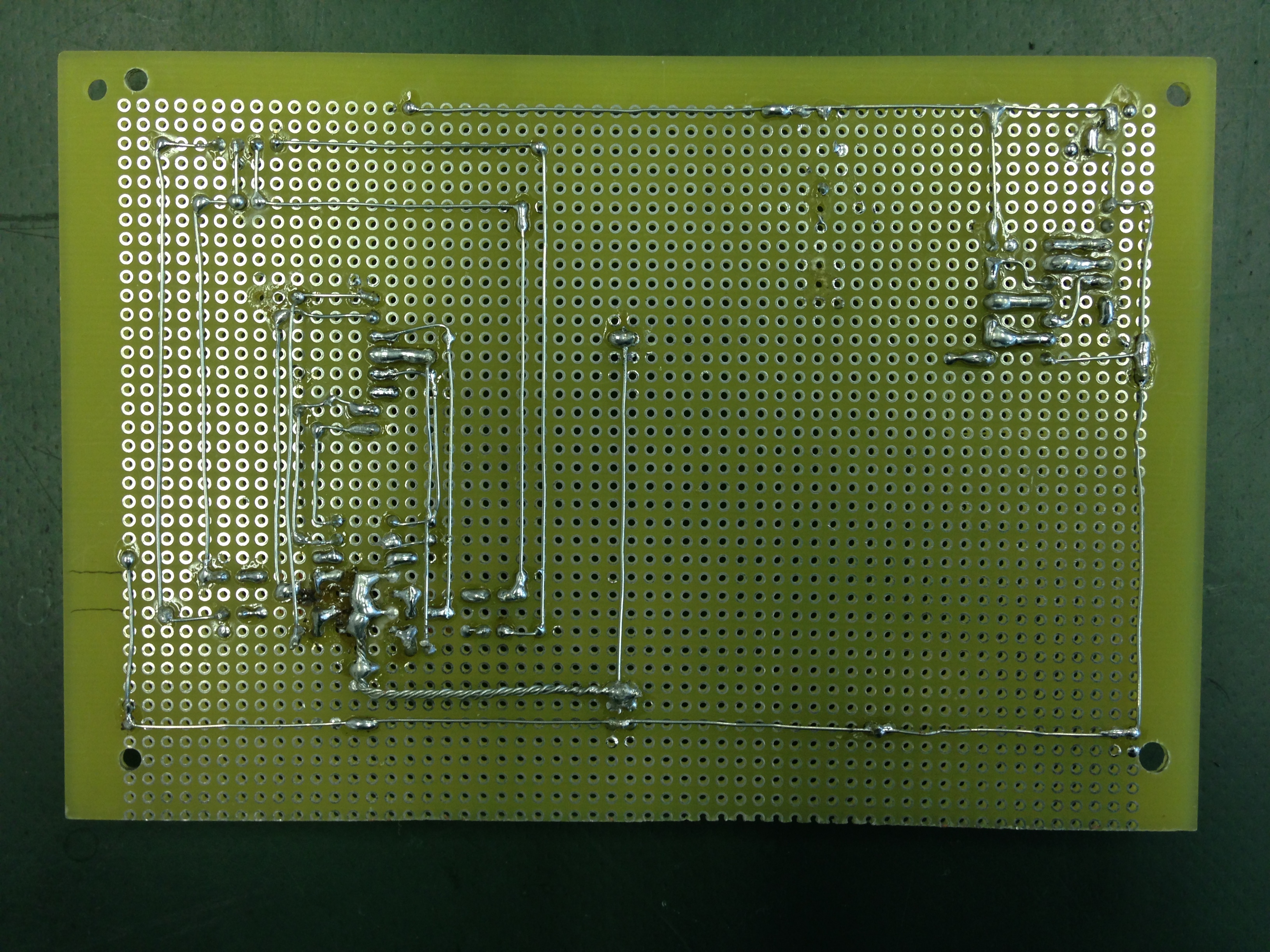 |
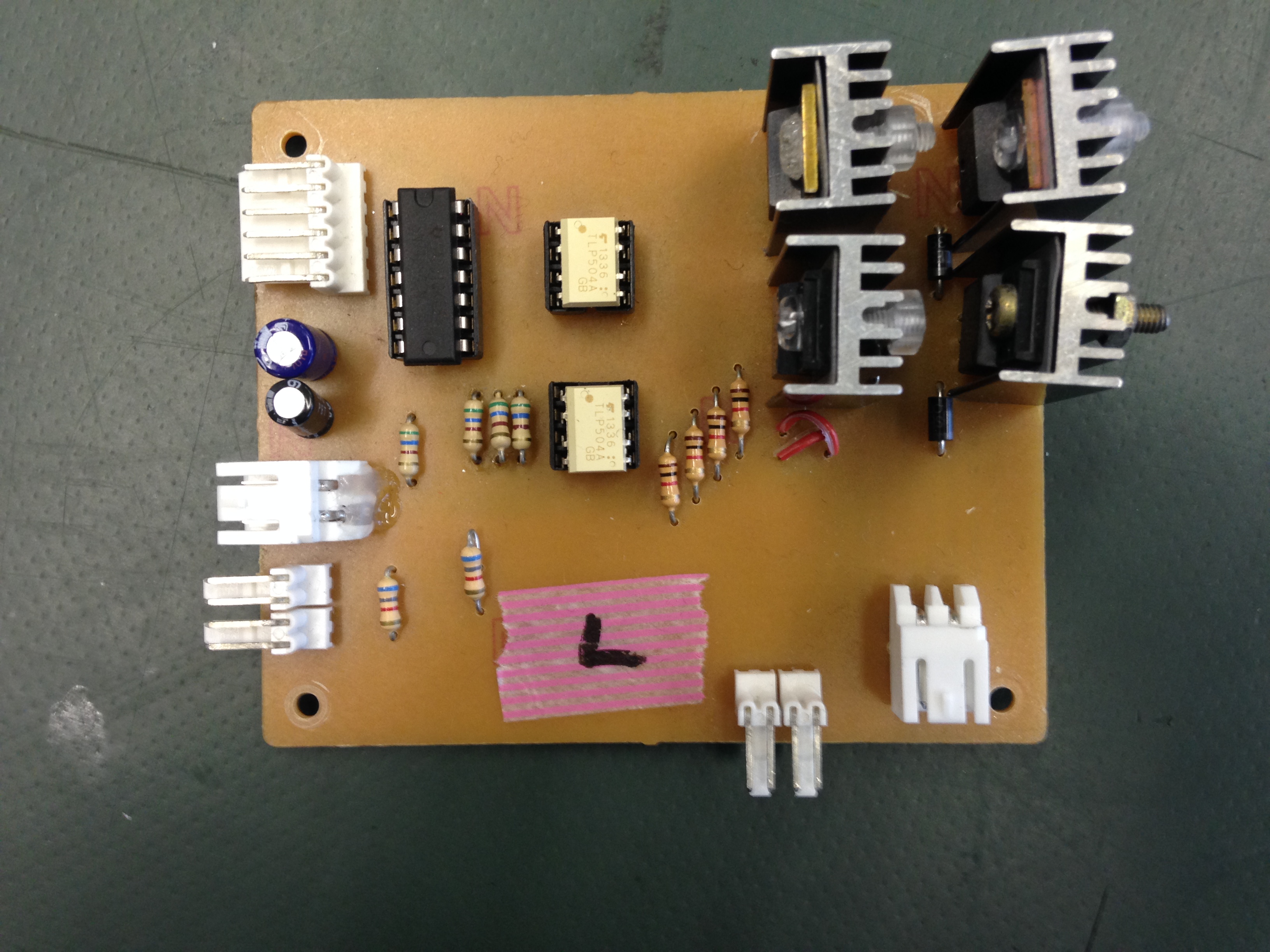
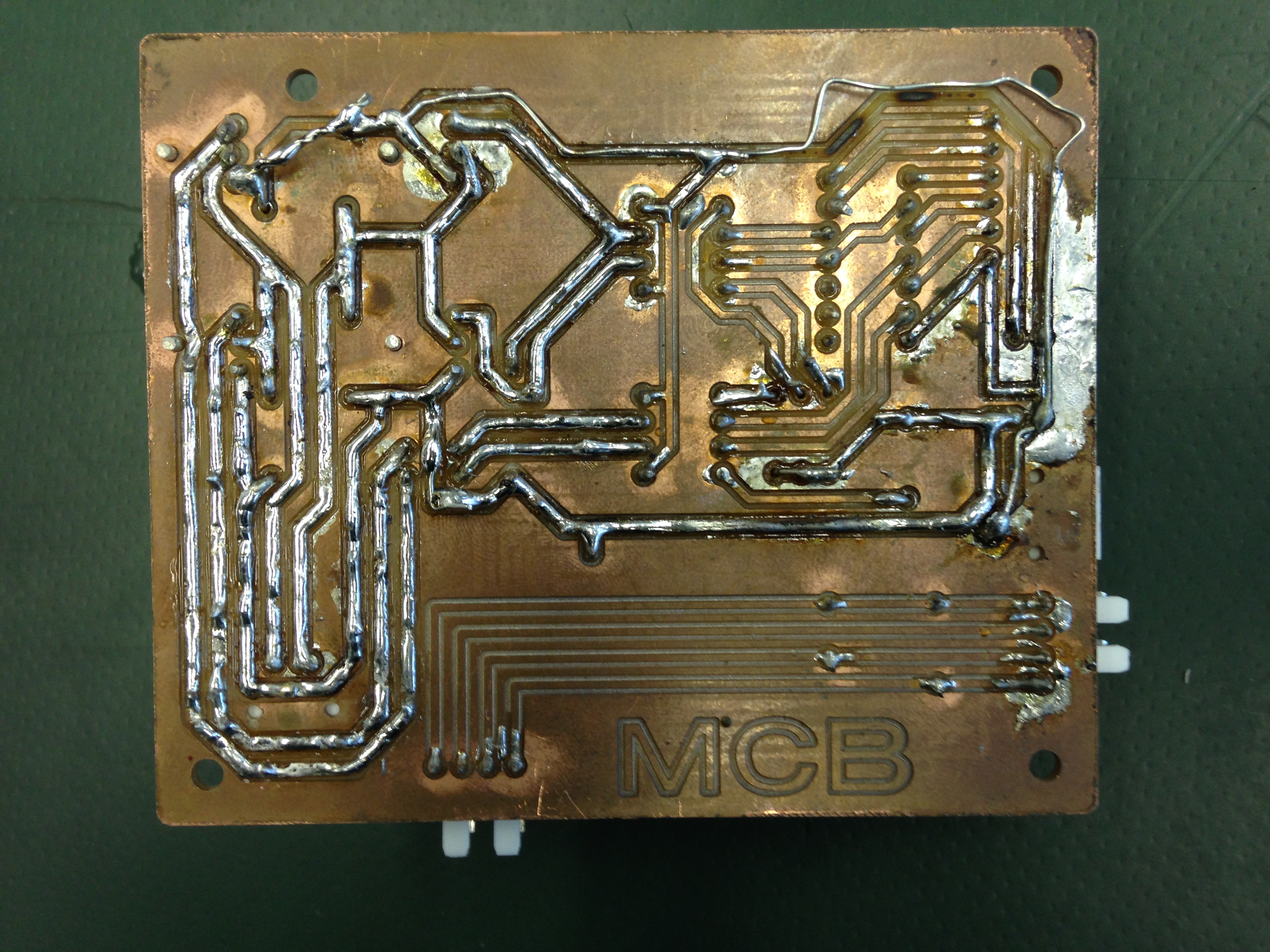
| Fig.3:下段表写真 | Fig.4:下段裏写真 |
・モーター制御ボード
ダイオードを変更して使用したところ大きな電流が流れ基盤が焼き切れるという事態が発生した。
MCBにはんだを盛って対応したが右側のMCBの基盤のほとんどが焼き切れ修復不可能な状態になっていたため右側のMCBを新規作成した。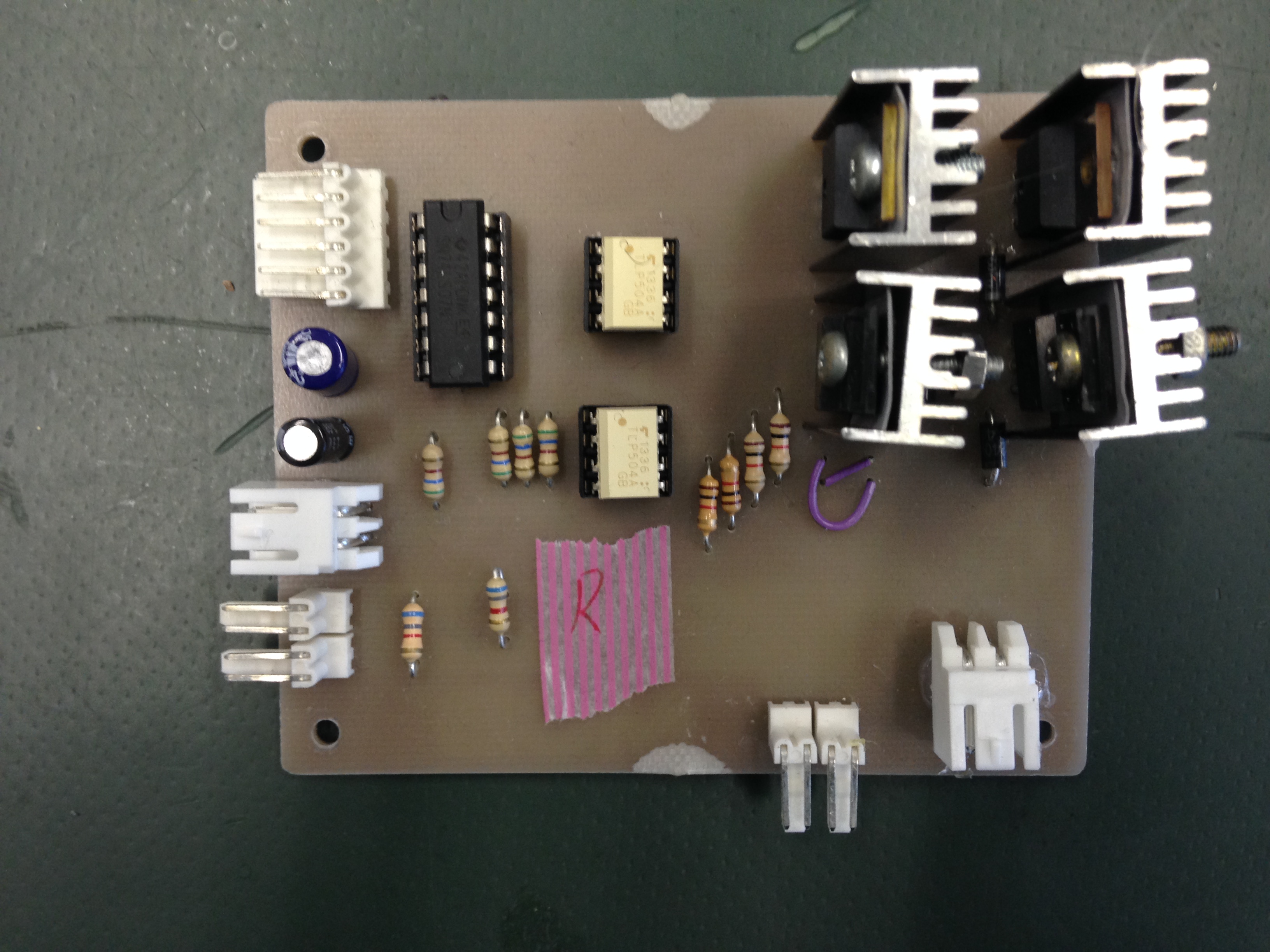 |
 |
| Fig.5:右MCB表写真 | Fig.6:右MCB裏写真 |
 |
 |
| Fig.7:左MCB表写真 | Fig.8:左MCB裏写真 |
・ケーブル
table2:製作したケーブル一覧
| 接続箇所 | 長さ(cm) | 個数 |
|---|---|---|
| タッチセンサからドータボード | 55,50,45 | 3 |
| タッチセンサから信号処理ボード | 55 | 3 |
| 赤外線センサから信号処理ボード | 30 | 4 |
| 信号処理ボードからドータボード | 45 | 1 |
| 信号処理ボードからFPGA | 40 | 1 |
| 電源からCPU,USS,信号処理ボード | 45 | 1 |
| 電源ボードからRMCB、LMCB | 20 | 1 |
3. テスト結果、評価
各部品のテスト結果を以下に示す。3.1 信号処理ボード
[テスト結果]
タッチセンサの回路は、どのセンサを押しても反応して正しい信号を確認できた。
四つすべての回路で基準電圧を変更でき、可変抵抗の調節によりヒステリシス特性の調整ができることを確認できた。
[評価]
すべての回路が予定通りの動作をし、部品実装においてもアクセスする部品や端子のみを上段基盤に実装できた。
3.2 モーター制御ボード
・RMCB
[テスト結果]
・導通チェックダイオードを変更して使用したところ大きな電流が流れ基盤が焼き切れるという事態が発生したため、MCBに実装されている抵抗300[Ω]を560[Ω]し、素子を実装した後基盤にはんだを盛って対応した。 MIRSMG3G モータ制御ボード詳細設計書のパターン図(Fig9)と作成したモータ制御ボードと照らし合わせた。
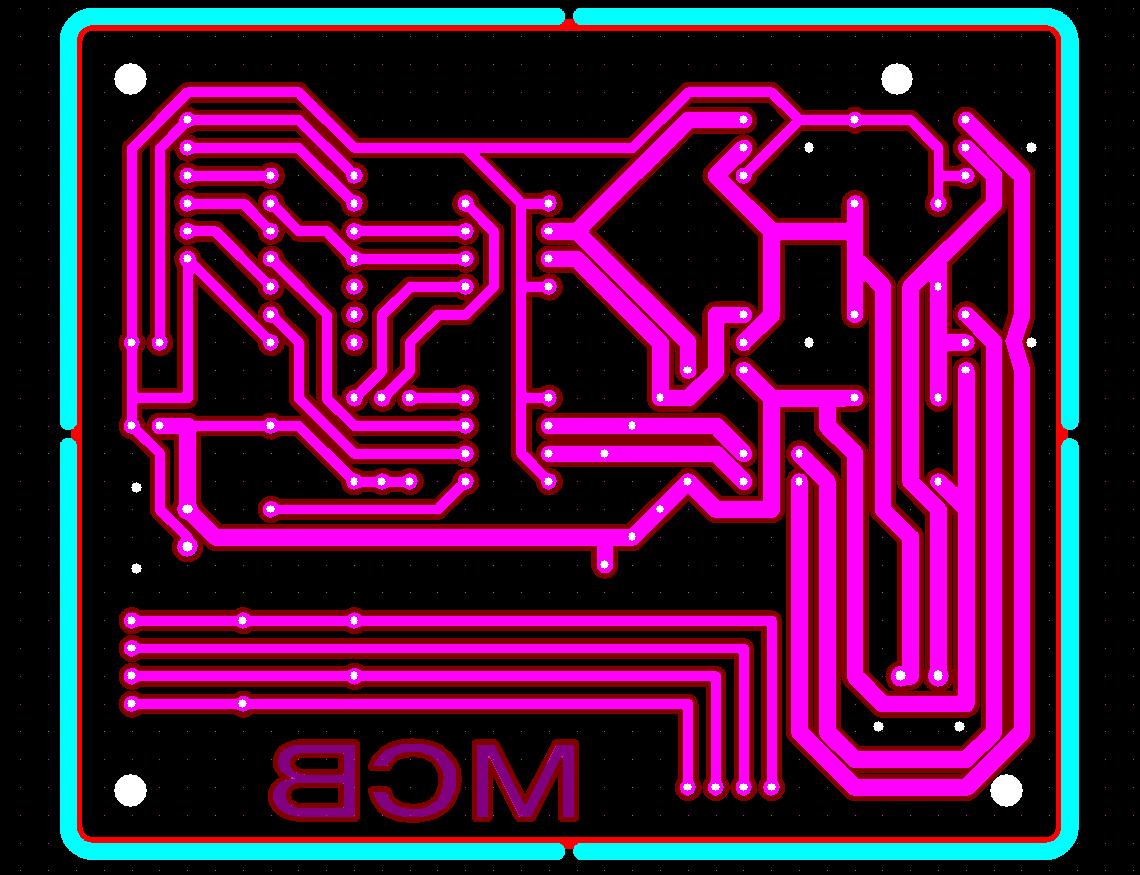
Fig9. モータ制御ボードパターン図
テスターを使用し各素子が繋がっているかとVccとGNDが短絡してないか確認した。
導通していなかった場合再度はんだ付けを行う。短絡していた場合ははんだ吸い取り線または、はんだ吸い取り機を用いてはんだを取り除いた。PチャンネルFETのヒートシンクを支えるアルミ芯の近くを走る回路がハンダで導通していため取り除いた。
・単体チェック
素子は旧RMCBで使用されていたものを流用したが、フォトカプラとFETが壊れていたため交換した。 MIRSMG3G モータ制御ボード試験仕様書を参照する。
オシロスコープを用いて出力波形を確認し、モータに繋げ正転、逆転、加速、減速が正常に行われることを確認した。
・統合チェック
MIRSに実装して問題なくPWM信号に従ってモーターが動くことを確認した。
[評価]
RMCBを新規作成することは元々予定になく、競技会直前での製作となったが問題なくPWM信号に従ってモーターが動いてよかった。・LMCB
[テスト結果]
・導通チェックRMCBと同様にチェックを行い問題がないことを確認した。
・単体チェック
変更点の少なさ、スケジュール調整などの理由から単体チェックは行っていない。
・統合チェック
大きな電流が流れ基盤が焼き切れるという事態が発生したため、大電流が流れるところにはんだを盛って対応した。
焼ききれた箇所は、鈴メッキ線とはんだを用いて接続しなおした。そして、流れる電流を考慮してMCBに実装されている抵抗300[Ω]を560[Ω]した。その後、問題なく動作した。
[評価]
機体実装後に基盤が焼ききれるという予測してない事態があったが最終的には問題なくPWM信号に従ってモーターが動いてよかった。3.3 ケーブル
[テスト結果]
製作後テスターを用いて導通しているか確認した。[評価]
すべてのケーブルで導通を確認したあと、運用したが特に問題はおきなかった。3.4 FPGA
[テスト結果]
ピン番号を変更した後、quartus上で信号を入力して、ピン番号が正しく変更されていることを確認した。
[評価]
ピン番号変更後問題がおきなかったのでよかった。
4. 総括
スケジュール遅延のため、LMCBの単体チェックを省いた。このため競技会に間に合わせることができた。スケジュール遅延理由と遅延した主な原因であるMCBについて以下に記す。
スケジュール遅延理由
・MCBに想定していたよりも大きな電流が流れ、ランドが焼ききれてしまった。これは大きな電流が流れた場合にどうなるか想定できていなかったため。・MCBからモーターに供給される電圧の波形が矩形波の形をしていない原因の調査、対応をしたため。
上記2つの対応にエレキ全員で対応していたので信号処理ボードが遅れた。
MCBの課題について
MCBが燃えた原因としてGNDに続く配線が細かったことが考えられる。Fig.10のように回路に流れる電流は負荷を通る前と後で同じだが、標準機のMCBは、太くしたのはvccに続く箇所のみで、電源のGNDに還る経路は、信号が流れる部分と同じ太さしかない。 これによって標準機のモータでは問題が起きなかったが、その倍の電流が流れるMIRS1503のモータの電流には耐え切れずランドが燃えてしまいそれによって作業が遅延した。この点は、再設計が必要だと考えられる。。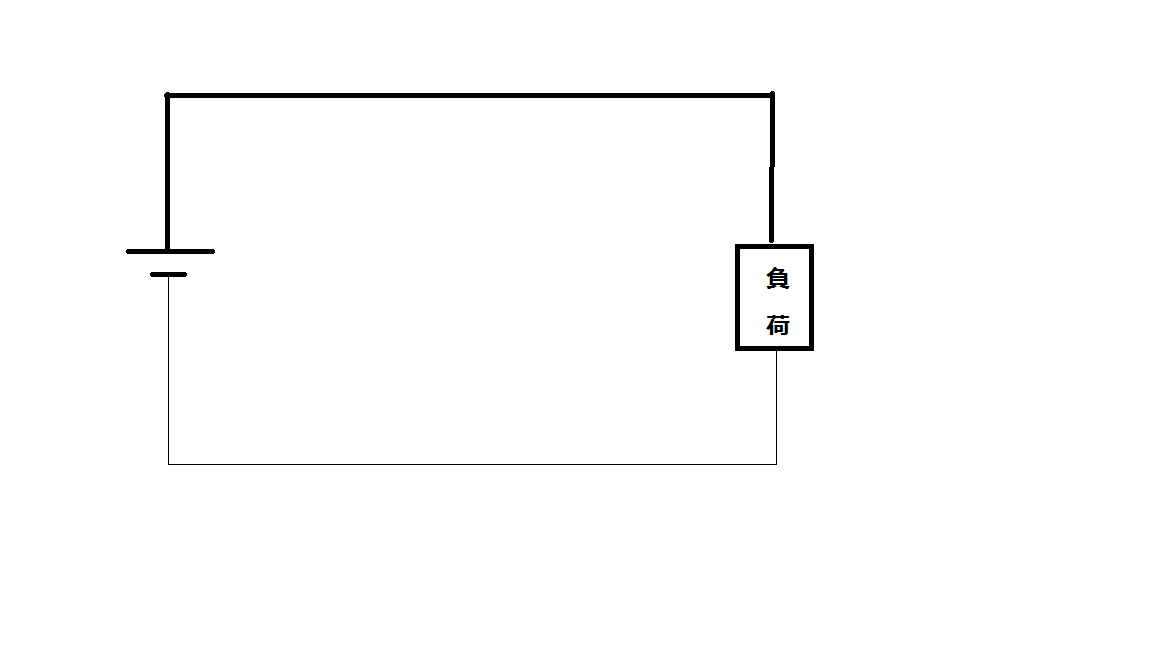
Fig10.MCB
沼津工業高等専門学校 電子制御工学科