2.1 動作シナリオ
MIRS1503機体の動作シナリオを、フローチャートとして以下に示す。

Fig.1:フローチャート
Fig.1:フローチャート
2.2 基本動作
2.2.1 現場急行
目標タイム:6[s]以内
直進・回転をシーケンス制御を用いてダイレクションボードに接触するまで走行する。
直進・回転をシーケンス制御を用いてダイレクションボードに接触するまで走行する。
2.2.2 数字認識
目標タイム:10[s]以内
ダイレクションボードに接触後、後退、正体補正、数字認識、数字をサーバに送信する。
ダイレクションボードに接触後、後退、正体補正、数字認識、数字をサーバに送信する。
2.2.3 巡回・追跡
怪盗機と接触するまでの目標タイム:30[s]以内
怪盗機を発見、追跡動作を行う。
怪盗機を発見、追跡動作を行う。
巡回動作
直進・回転を行う。角を2回曲がるごとに正体補正を行い、美術品と壁との中央を走行するように制御する。
復帰機能
怪盗機の赤外線を1000[mm]以内で受信できなくなった場合、また赤外線を受信していない時にタッチセンサが反応した場合には、左手法(Fig.2)を用い、コースの中央に戻った後、巡回モードへ切り替わる。
前進し、前面のタッチセンサが反応したら、正体補正を行い、接触した壁と垂直となり通路の真ん中に来るように移動し、左に回転し前進する。これを繰り返してもとの巡回ルートに戻る方法を左手法とする。
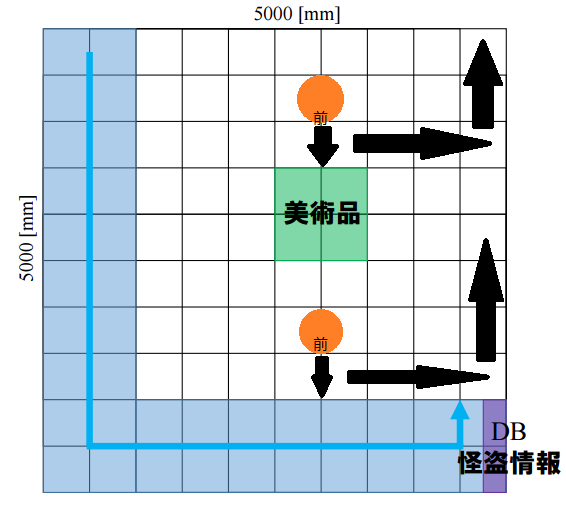
Fig.2:左手法の経路
前進し、前面のタッチセンサが反応したら、正体補正を行い、接触した壁と垂直となり通路の真ん中に来るように移動し、左に回転し前進する。これを繰り返してもとの巡回ルートに戻る方法を左手法とする。
Fig.2:左手法の経路
捕獲機能
怪盗機の発する赤外線を4つの赤外線受信センサで受信後、反応した赤外線受信機搭載位置を元に怪盗機の方向を割り出し、追跡する。
また、機体の直径を拡大させることで怪盗機との接触しやすくする。
また、機体の直径を拡大させることで怪盗機との接触しやすくする。