| 名称 | MIRS1503 システム提案書 |
|---|---|
| 番号 | MIRS1503-DSGN-0001 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2015.10.26 | 天野南月,飯塚直紀,遠藤幸一郎,遠藤真哉,大場春佳,菊澤雅哉,菊地祐太,田中宏明,山田怜央 | 初版 | |
| A02 | 2015.10.30 | 天野南月,飯塚直紀,遠藤幸一郎,遠藤真哉,大場春佳,菊澤雅哉,菊地祐太,田中宏明,山田怜央 | 小谷先生 |
第2版 一部改訂(改訂箇所はMIRS1503 システム提案書レビュー議事録を参照) |
| 変更点 | 目的・理由 | 担当者 | 考えられる問題点 |
|---|---|---|---|
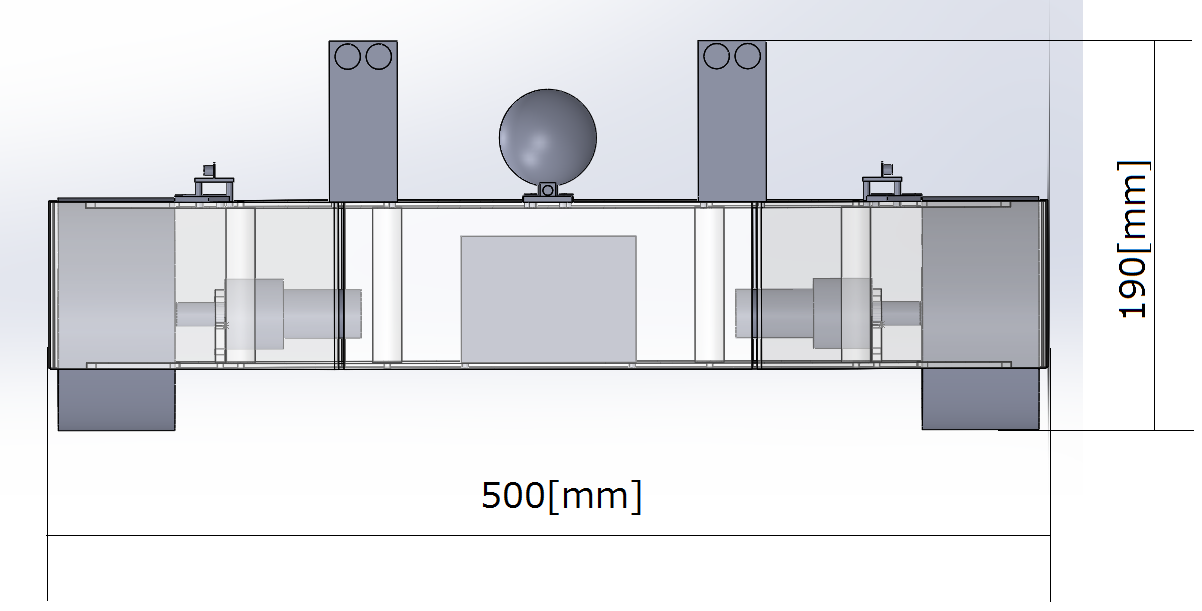
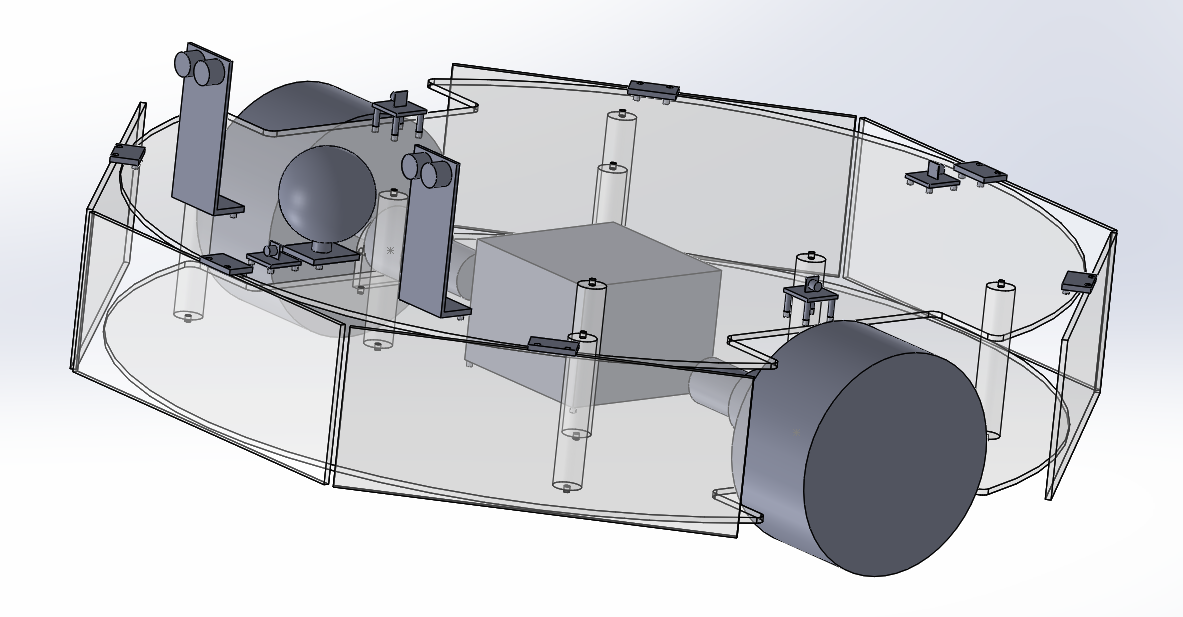
| MIRSの直径を350[mm]から500[mm]に変更する。 | MIRSの面積を大きくすることにより、怪盗機に接触しやすくするため。 | 菊澤・田中・天野・山田 | 走行プログラムの再調整が必要になる。また、アクリル板がたわみやすくなり、破損する恐れがある。 |
| 支柱の本数を増やす。 | 上下段シャーシのたわみを抑制するため。 | 菊澤・田中・天野・山田 | |
| モータとギアヘッドを変更する。 | 速度の上限を上げるため。 | 菊澤・田中・天野・山田 | 速度制御が難しくなる。 |
| 赤外線受信センサ搭載用の穴をシャーシに開ける。 | 怪盗機の方向を認識するための赤外線受信センサを、機体の前後左右に1つずつ取り付けるため。 | 菊澤・田中・天野・山田 | |
| バンパを3つ増設する。 | 機体後方にタッチセンサを3つ増設するため。 | 菊澤・田中・天野・山田 | |
| MIRSのシャーシの大きさに合わせ、バンパを再度製作する。 | MIRSの外形が大きくなったため。 | 菊澤・田中・天野・山田 |
| 変更点 | 目的・理由 | 担当者 | 考えられる問題点 |
|---|---|---|---|
| 赤外線受信機用の基板の製作。 | 怪盗機からの赤外線を受信するため。 | 飯塚・遠藤(幸) | 基板が増え、配線が複雑になる。 |
| 新規のケーブルを製作する。 | 現在のケーブルよりも長いケーブルを製作する必要があるため。 | 飯塚・遠藤(幸) | |
| タッチセンサを3つ増設する。 | 機体後方が壁と怪盗機にぶつかったことを認識するため。 | 飯塚・遠藤(幸) | |
| モータ制御ボードのダイオードを変更する。 | 新規に購入するモータに合わせ、定格電流が高いダイオードが必要であるため。 | 飯塚・遠藤(幸) |
| 変更点 | 目的・理由 | 担当者 |
|---|---|---|
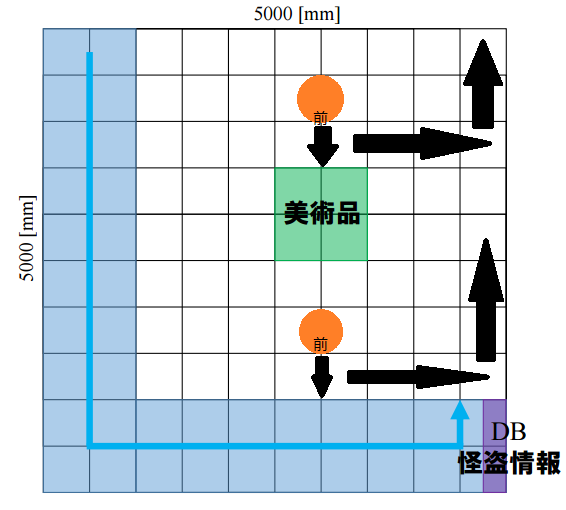
| 競技場内で巡回を行うためのプログラムを作成する。巡回時には通路中央を走行する。 | 怪盗機を探索、発見するため。 | 遠藤(真)、大場、菊地 |
| 競技場巡回中に機体の正対補正を行うプログラムを作成する。正対補正は競技場の角を2回曲がる度に行う。 | 競技場通路の中央を走行するため。 | 遠藤(真)、大場、菊地 |
| 赤外線受信センサを用いて、怪盗機がどの位置にいるのか特定するプログラムを作成する。 | 怪盗機の方向を推測するため。 | 遠藤(真)、大場、菊地 |
| 走行中に機体が壁にぶつかった際に、回避行動を行うプログラムを作成する。 | 巡回中に予定していた走行ルートを外れた場合に、正しい走行ルートに戻るため。 | 遠藤(真)、大場、菊地 |
| 怪盗機から発信される赤外線信号を受信し、怪盗機の位置を推測するプログラムを作成する。 | 怪盗機を発見、追跡するため。 | 遠藤(真)、大場、菊地 |
| 画像処理で認識した数字をサーバに送信するプログラムを追加する。 | サーバに数字情報を送信するため。 | 遠藤(真)、大場、菊地 |
| 物品 | 個数 | 要求 | 購入先 | 金額 |
|---|---|---|---|---|
| アクリル丸棒 | 支柱を新たに製作するため。 | アクリル丸棒 直径15[mm] 長さ1000[mm] アクリルアイ株式会社 |
820[円] | |
| アクリル板 | シャーシを新たに製作するため。 | アクリル透明板 サイズ995[mm]×1000[mm] 厚さ3.0[mm] アクリルアイ株式会社 |
3200[円] | |
| 赤外線受信センサ | 怪盗機から発信される赤外線信号を認識するため。 | ボールセンサー DER-542 株式会社ダイセン電子工業 |
1812[円] [453円/個] |
|
| ダイオード | 新規に購入するモータに合わせ、定格電流が高いダイオードが必要であるため。 | ショットキーバリアダイオード 40V2A SB240LES 秋月電子通商 |
200[円] [25円/個] |
|
| ギアヘッド | MIRSの機体の最高速度を向上させるため。 | AO-8048 タミヤギヤヘッド K36 タミヤ |
6480[円] [3240円/個] |
|
| モータ | ギア比の変更に伴い減少するトルクを、モータの出力向上で補うため。 | AO-8042 ギヤヘッド用 540モータ タミヤ |
4320[円] [2160円/個] |
紙粘土 | エンターテイーメント性を追求し、装飾を施すため。 | Home Assist |
594[円] [198円/個] |