今回の開発スケジュールと実際の開発スケジュールのリンクを以下に示す。
開発スケジュール
実際の開発スケジュール
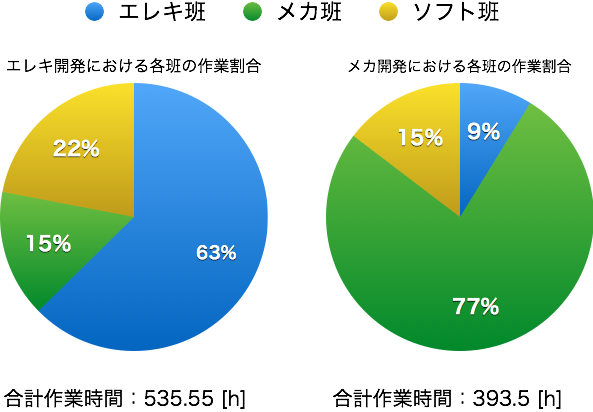
3.1 メカ
まず、システム提案書、システム基本設計書の作成の遅れでオリジナル機体作成のスケジュールが大きく遅れた。
そのため、メカ詳細設計書作成も遅れ、予定では後期中間テスト終了後から各部品の製作を始める予定だったが1週間遅れた。
針機構以外の部品の製作は上記より1週間ずれたがかかった期間は予定通り1週間程度だった。
針機構はシステム提案書の時点で難易度が高くなることが予測されていたので多めに3週間程度期間をとったが、
試作も合わせると冬休み明けからMIRS本番まで改良を加え続けていた。理由としては修正回数の多さと工場にシャーシなどの製造を発注したあとに、
エレキのFPGAボードの手伝いをしてもらっていて針機構の製造に期間が空いてしまったことの2つが挙げられる。
3.2 エレキ
メカと同様の理由でスケジュールが押していたので、こちらも予定では後期中間テスト終了後から各ボードの製作を始める予定だったが1週間遅れた。
ボード類の製作では、モーター制御ボードを新規作成することになったので、その試験なども含めて1ヶ月を要した。
その分FPGAのプログラム作成の時間を少なく取ることになった。FPGAのプログラムについては2月の第1週までの3週間と多めに取っていたが、
上記の理由で年度末までかかったが、合計の時間は予定と同じ3週間程度を要した。
ドータボードは最初プリント基板で作成したが、断線などの問題が起きたためユニバーサル基板に変えたり、ショートしていた部分の修正などに時間を取られたので
予定では1週間程度で終わるはずだったが計1ヶ月程度を要した。製作始めがモーター制御ボードの試験などで2週間程度ずれ、MIRS本番の1週間前までドーターボードの修正などをしていたので、
計1ヶ月を要した。
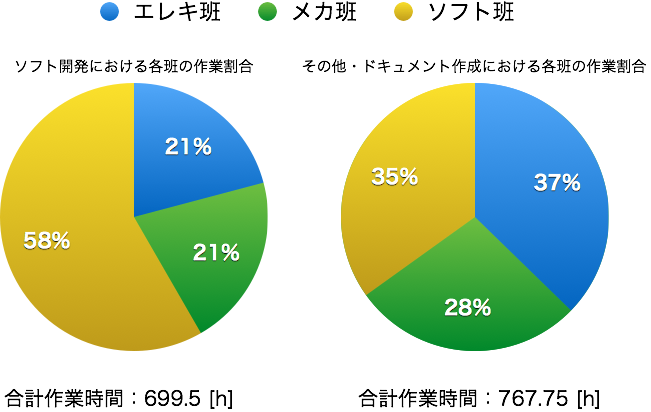
3.3 ソフト
メカ、エレキと同様の理由でスケジュールが押していたこともあり、予定では後期中間テスト前に詳細設計書が終わっていたが、実際は1週間程度遅れた。
期間は予定と同じ2週間程度だった。
モジュールの作成に関しては、ソフト班の2人が班の主力としてソフトだけでなくエレキなどにも着手していたので、
まとまった時間を当てることができなかった。そのため、直前になって急いで作ることになってしまった。
これは、2人に負荷が集中することが予測できたはずなのに対処しなかった私DMの責任である。
各モジュールのコーディングには1日程度でしかかからなかったが、単体試験に時間がかかったため、予定通り計1週間程度ずつは要した。
予定ではMIRS本番の1週間前から各モジュールの統合試験を始める予定だったが、上記の理由や単体試験に時間をかけたため、MIRS本番前日だけしかやることが出来なかった。
単体試験に時間をかけたことは、個々のモジュールの性能を上げることができて良かったが、統合試験に時間をかけることが出来なかったので、本番で思うような動作が出来なかった。
チームコンセプト「Search & Destroy」は守ったが結果には表れなかった。単体試験のレベルでは、「Search」も「Destroy」も競技でできる程度にはできていたが、統合してからの問題が競技会までに解決できなかった。
主な原因は「スケジュールの遅れ」と「設計段階での情報不足、練度不足」だと思われる。
スケジュールの遅れについてはシステム提案書、基本設計書がレビューを通るのが遅かったこともあるが、メカの設計が一人に集中してしまったことがスケジュールの遅れに大きくつながっていたと感じる。
エレキ、ソフトは自分(眞野)と各パートリーダーで話し合いながら設計をしていた。しかし、メカは自分がメカについて極端に弱いと言い訳をしてメカ班リーダーに丸投げしてしまった。
その為、エレキ、ソフトではあれがダメこれがダメと話しながら設計したため設計したとおりに大方できた。しかし、メカではメカリーダー一人のため、ミスを指摘しきれず、当初頭で考えていたものとはずれてしまった。それが車高が極端低くなったことや、タイヤが小さいことに表れてしまったと思う。
また、走行系がとても難しく、その修正に時間がかかり過ぎてしまったことも、統合試験が競技会前日しかできなかったことにつながっている。
設計段階での情報不足は、オムニホイールについての知識が乏しかったことである。3年のロボット工学演習で4輪のオムニホイールのロボットは作って制御もしたからあの感覚でいけるだろうと思っていた。
しかし、実際は3輪にするとで極端に難しい制御となった。理論上は変換行列を変えるだけである為、難しくはないだろうと思っていたが実際はタイヤが極端に滑り、その結果3輪と4輪とで大きな違いがあった。
走行系は行きたい位置に行き、怪盗を追いかける点では最低限の動きは出来ていたが、巡回動作となると、できたものではないものとなってしまった。
練度不足はアイデアがなかなか出ず、システム提案書が遅れてしまったことに表れている。みんなが、いろんなものに触れていたらアイデアはもっと出たと思う。しかし、学生であるがゆえに練度不足は当然だと思う。
みんなやれる範囲のことで頑張ってくれたと思う。
パートごとの連携について、メカがエレキ、ソフトとは孤立してしまった感がある。自分がエレキとソフトばかりをやっていて、メカにほとんど触れていないことに原因があると思う。申し訳ない。
また、メカ、エレキ、ソフトのやり取りも各パートリーダだけで行っていて各パートメンバーはさっぱりだっただろうと思う。
メカについては、メカリーダーを中心に地方分権になってしまった。しかし、メカリーダーの統率力で上手く回っていた。
技術的な面ではオムニホイールの選定が甘かったことなど、設計段階での不備はあるが、加工技術や3DCADでは良いものを発揮してくれたと思う。スケジュールから遅れてしまったのは設計にあると思う。
エレキは、エレキリーダーを中心に上手く回っていたと思う。設計する人、だるい作業を率先してやる人、細かい作業が得意な人と役割が大体決まっていて、かつ、メカ班が手伝ったのでボード作成で大きな障害はなかったと感じる。
強いて言えば、モーター制御ボードの試作試験の構想に無駄に時間をかけすぎたことが改善点。パトランプが動かなかったのは残念であるが、ボードも直接電圧をかけると期待通りの動きをして、FPGAのシミュレーションでも上手くいっていて、プログラムでもシステムからFPGAに書き込んだことが返ってきていたから原因がわからない。
ソフトはコーディングの9割9分(1分はメカリーダー)が2人になってしまった。人数が少ないため、終盤は大変だった。
しかし、2人でもver.管理が大変だった。ver.管理の方法をコーディングを始める前に話し合うべきだった。そうすれば、人を増やしても大丈夫だと思う。
6.1 眞野千輝(リーダ,ソフト)
MIRS、1年間ありがとうございます。MIRSを通して学んだことは多いです。特にエレキに関しては、最初はよくわからなかったけど、標準機を作る際に宇佐美にいろいろ教わり回路がそこそこ読めるようになりました。
今年の初め、リーダーなんて役職は自分には合わないだろうと思いながらの立候補でしたが全くその通りで、結果が出なかったのは技術的問題よりも自分の采配不足が大きいと思います。
結果は残念なものになりましたが、作ってるときは楽しかったのでまぁいいです。1つだけ残念なことは、メカに関して手が出なかったことです。
マップをもっと押してもよかったかなと思います。来年度以降、マップを引き継いでくれる班がいるとうれしいです。
もう一回MIRSやりたい。
- 五十嵐:画像処理とか最初わけわかんなかったけどコンパイルエラー直し手伝ってる時に教えてくれたおかげでいろいろできるようになった。Makefileもまとめなおしてくれたおかげで、やりやすかった。メカにも時々手をだしてて助かった。
- 西留:文系能力を発揮して日本語が変な文とかを訂正してもらった。ゲイン調整とか、ケーブル作り、はんだ付け等で各パートで補欠要員として働いてくれた。
- 尾関: はんだ付けのプロ。おかげで、太い配線と細い配線が混じってる部分等の難しい所をスムーズにやってくれたおかげでエレキの作業がはかどった。
- 佐野: 3DCAD出来たのがとても助かった。武ちゃんのお手伝いな感じで加工とかもやってメカを形作ってくれた。
- 宇佐美:この班の一番の功労者だと思う。エレキのセンス、知識が良い感じ。表には出ないけどいい仕事をしてる。
- たかふみ:主に針機構をやってもらった。寮の仕事と就職のと、いろいろ忙しい中、針機構を形作ってくれた。
- たけ:メカ全投げしてゴメンナサイ(/_;) メカを全部やった。佐野ちゃんと喬章を上手く使ってメカ班をまとめてくれた。
- TKI:広報担当。広報担当。僕の苦手なプレゼンを教えてくれた。高専祭とかHP運営で大活躍。エレキではケーブル作りをしてくれた。
6.2 五十嵐雄介(プロジェクト兼任,ソフト)
ソフトの担当として、プログラムを作成しました。
機体の作成、回路の作成を任せていた。がとてもきれいでよかったです。
画像処理についてはうまくできたが、カメラの使い方についてが苦戦しました。
オムニホイールによる3輪の制御は予想したいてものより難しく、
実際に走らせると、おもいどおりの動作をせず辛かったです。
試行錯誤とたくさんの調整をして、前後左右、ななめ、全方向に移動できるようにできたことは満足です。
特に横方向の移動ができたことと、ななめに移動したときに誤差を自動で直せることにはうれしかったです。
本番でその動きを見せるとこができずに残念です。
また、プログラムの後半は眞野君に任せていた部分が多く、自分が作ったプログラムを改良したりしてもらいました。
また、班員には、走行試験のために長い間手伝いをしてもらい、とても助かりました。
MIRS製作お疲れ様でした。
6.3 西留直人(ドキュメントマネージャ)
主にドキュメント管理台帳の整理、ドキュメントの作成を行った。また、いろいろな雑用業務もこなしました。
ドキュメントマネージャということで、スケジュールや予算の管理、物品発注などを主に行いました。
予算の管理や物品発注などの最低限の仕事はしたが、スケジュール管理という点ではまったくできませんでした。
最初のスケジュールの大幅な変更に対して対応することができなかったのが一番の後悔です。
雑用業務では回路の半田付けをしたり、組み立ての手伝い、パラメータ調整の手伝いなど多岐に渡ってやらせていただき、
MIRSの全体像をなんとなく掴むことができたので嬉しかったです。
6.4 尾関主馬(エレキ)
MIRSを終えて、自分のした仕事について思い出してみた。
私はユニバーサル基盤への部品実装と、コード(ケーブル)作りが主な仕事だったと思う。
正直、エレキ班のメンバーとしては能力に欠ける存在であったと思う。
しかし、自分の作ったものに特に不備や故障といったトラブルが出なかったのは自分のスキルが多少なりともあったということだろう。
この経験を将来どのように活かすかが、今後の課題だろう。
6.5 佐野友里花(メカ)
メカでシャフトやシャーシ、針機構を作ることになったので主に3DCADで図面を作ったり部品の加工をしました。
元々3DCADに興味があり、また、インターンシップで3DCADや半田付けを学んできたので実際にMIRSで知識が生かせてよかったです。
ほかの部品との兼ね合いで寸法を何度も変更したり大変なこともあったけど、やりたいことをやるのは楽しいし、失敗もいい経験になったと思います。
エレキではPINの付け根の接続が弱く接触不良になることがあったのでグルーガンでガチガチに固めました。
どんな小さいところの接触不良も後で動かなくなる原因になるので大切な作業だと思いました。
MIRSを通して今までやったこのないことが多く色々なことがわかりました。苦手なことや得意なことや興味があることに幅広く触れることができたので、
これからの進路や就職したときに少しでも経験を生かせたら意味のあるMIRSになると思いました。
カメラの不具合でいい結果は残せなかったけど、完成までの過程を班員で協力して自分たちなりに頑張れたのでよかったと思います。
個性あふれる班で楽しかったです。
6.6 宇佐美昴礼(エレキ)
エレキの方では、基板の作成に時間がかかり、早期からFPGAの知識を持ったメンバーを用意できなかったことが失敗だった。
FPGAプログラムの完成の遅れの結果として、走行試験の遅れが生じチーム全体に影響を出してしまった。
また、最後までパトランプのON/OFF制御が完成しなかったことが心残りだった。
6.7 伊藤喬章(メカ)
主に針機構の作成を担当しました。
最初構造が思いつかず、精神的に苦しかったが
完成したときはすごい達成感を感じました。
就職してからは絶対に使わない3Dプリンターや
エレキのFPGAボード作成に携われたのはいい経験になったと思います。
MIRSで一番経験になったのは精神的に追い込まれたことだと思います。
これはどこに就職しても一番必要な経験だと思っています。
6.8 渡邉武大(メカ)
メカ担当として一年間MIRSをやってきましたが、ほかにエレキ、ソフトにも多少触れていました。
メカ班として製作したものは、ドライブシャフト、シャーシ(上、中、下段)です。
エレキ班としては、モーター制御ボードを担当し、ソフト班としてはマッププログラムを担当しました。
メカ班は、部品発注が思ったより遅れたため完成が遅れてしまいました。ですが、部品自体の完成度は高く満足できるものでした。
メカ班の反省としては、多くのことがありましたがメカ開発報告書を参照してくれれば書いてあります。
エレキ班は、回路製作を手伝いました。
回路自体の設計は、メカ班と連携して設計するところがありシャーシとの兼ね合いについて話し合うことがありました。
ソフト班は、マップの作成を行いました。それ以外に、パトランプのプログラムを作成する予定でしたが時間がなく作成はしませんでした。
メカ班チーフとして、もう少し早くに部品を取り揃え加工をはじめたかったと思います。
部品の到着の日時をしっかりと調べていなかったので、少し後悔しています。
また、もう少し早めにソフト班に合流し手伝いたかったです。
競技会ではいい成績を残せませんでしたが、自分たちのやりたいことをやりたいようにやり、盛大に失敗した班だと思っています。
この班で一年間やれてよかったと思っています。MIRSの授業はとても楽しい時間でした。
6.9 高井悠(エレキ)
今回エレキ班として一年間頑張らせてもらいましたが、どっちかって言うと広報担当でした(笑)。
もちろんエレキ班としても自分に課せられた作業や、開発に意欲的に取り組みました。
その合間を縫ってプレゼン作成やムービー作成をやらせてもらって、自分のできることが格段に増えたように思います。
競技会の結果はデモ・本番ともによくありませんでしたが非常に有意義な一年間を過ごせたと思います。