| 名称 | MIRS1302 ソフト詳細設計書 |
|---|---|
| 番号 | MIRS1302-SOFT-0001 |
最終更新日:2013.12.17
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2013.12.18 | 山田,泉谷 | 初版 |
srcc++/ -Mirs/ メインプログラム(巡回、探索、追跡、補正) Mirs.cpp Mirs.h -Motor/ モーターとの通信を行う Motor.cpp Motor.h -MotorController/ 走行を制御する MotorController.cpp MotorController.h -Uss/ 超音波距離センサを扱う Uss.cpp Uss.h -FpgaIO/ FPGAを介した入出力を扱う FpgaIO.cpp FpgaIO.h -Img/ 画像処理を扱うスレッドを管理する Img.cpp Img.h -BallDetector/ ボールの認識を行う BallDetector.cpp BallDetector.h -NumberDetector/ 数字の認識を行う NumberDetector.cpp NumberDetector.h -Field/ 地図情報を扱う Field.cpp Field.h -Route/ 経路情報を扱う Route.cpp Route.h -Debug/ デバッグ用マクロの定義 Debug.h -Test/ テスト用のプログラム(端末のコマンドのように、対話しながらテストを行う) TestTalk.cpp TestTalk.h -Data/ 入力するデータと、出力したデータを置く。また、地図情報と経路情報を簡単に作るためのスクリプトを置く routemake.py fieldmake.py PatrolRoute.dat SearchRoute.dat Field.dat
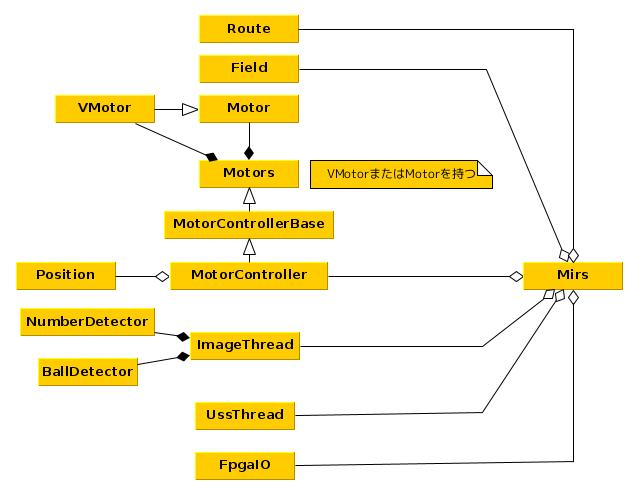
| Route | 経路情報をファイルから読み込み、扱うクラス |
| Field | 地図情報をファイルから読み込み、扱うクラス |
| Motor | モータ制御ボードと通信を行うクラス |
| VMotor | モータ制御ボードと通信を行っている振りをして、シミュレーションを行うためのクラス |
| Motors | モータ2つをまとめて操作するためのクラス |
| MotorControllerBase | 直進、回転など、移動を制御するための基礎的なクラス(機能は標準のものとほぼ同じ) |
| Position | 位置情報を扱うクラス |
| MotorController | 移動の制御と自己位置推定を行うクラス |
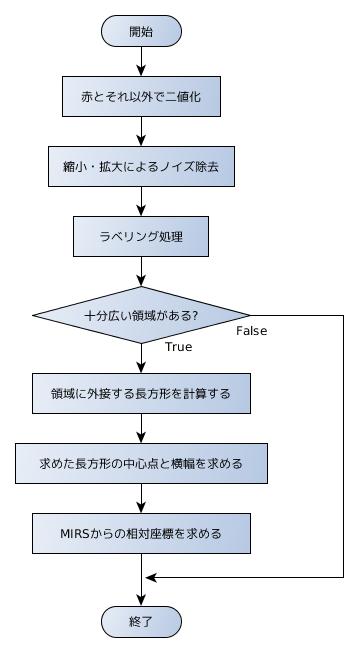
| NumberDetector | 数字認識を行うクラス |
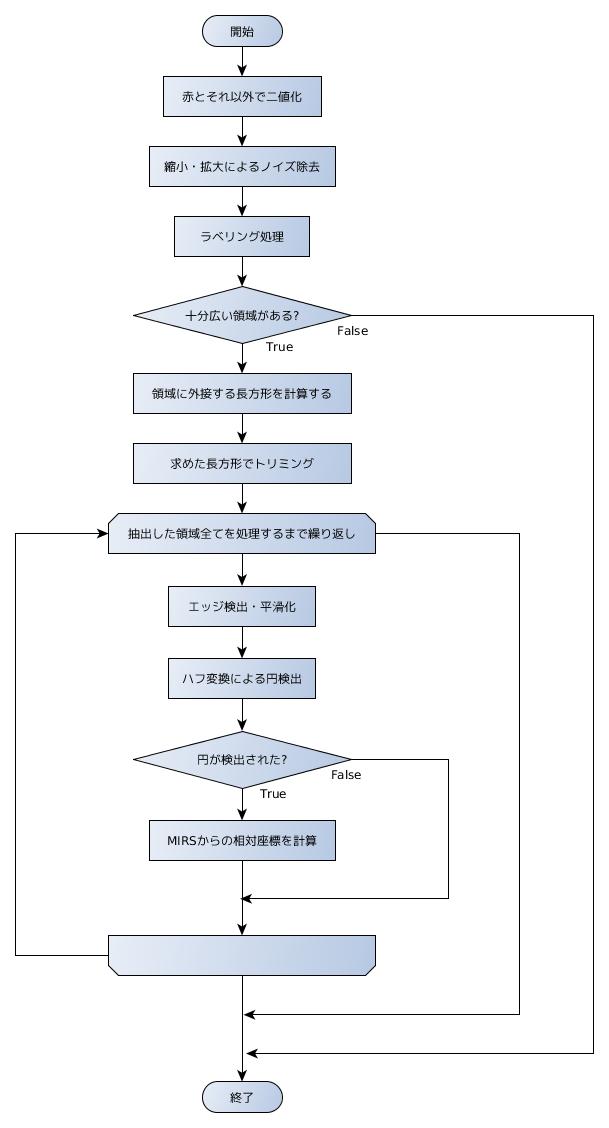
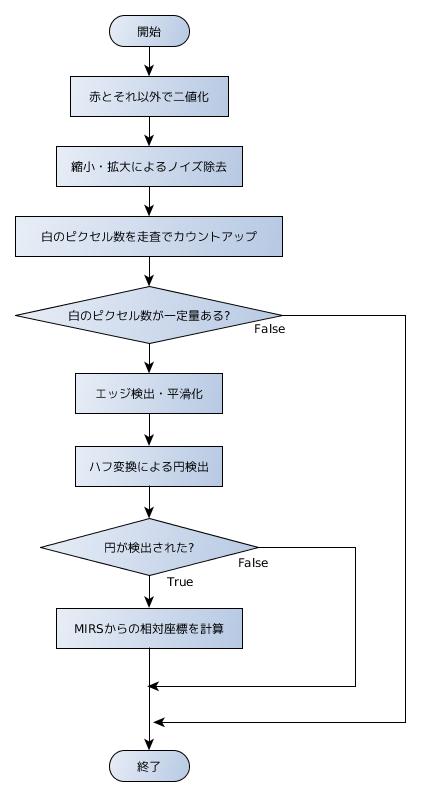
| BallDetector | ボールの認識を行うクラス |
| ImageThread | 画像処理スレッドを扱うクラス |
| UssThread | 超音波距離センサ用のスレッドを扱うクラス |
| FpgaIO | FPGAの入出力を扱うクラス |
| Mirs | 行動の制御を行う。メインのクラス |
| メインスレッド | 初期化、スレッドの生成、終了処理を行う。 |
| 画像処理スレッド | 画像処理を行う。 |
| USSスレッド | 超音波距離センサによる計測を行う。 |
| コントローラスレッド | 行動の制御を行う。 |
| object_name | parameter | 説明 |
|---|---|---|
| wall |
parameter1 : 始点のX座標を表す整数 parameter2 : 始点のY座標を表す整数 parameter3 : 終点のX座標を表す整数 parameter4 : 終点のY座標を表す整数 |
始点から終点までの壁を表す。 |
| column |
parameter1 : 中心のX座標を表す整数 parameter2 : 中心のY座標を表す整数 parameter3 : 半径を表す整数 |
円柱を表す。 |
| checkpoint |
parameter1 : 撮影ポイントのX座標を表す整数 parameter2 : 撮影ポイントのY座標を表す整数 parameter3 : 撮影対象のX座標を表す整数 parameter4 : 撮影対象のY座標を表す整数 |
カメラによる撮影ポイント・撮影対象を表す |
| 宣言 | 概要 |
|---|---|
| int main() | 初期化と終了処理を行う。srcc++/Mirs.cppの中で定義される。 |
| Mirs::Mirs(MotorController& mc, UssThread& uss, ImageThread& imagethread, FpgaIO& fpgaio, Field& field, Route& route) | Mirsクラスのコンストラクタ |
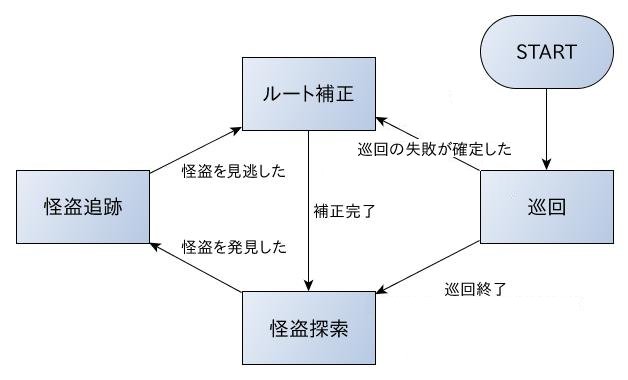
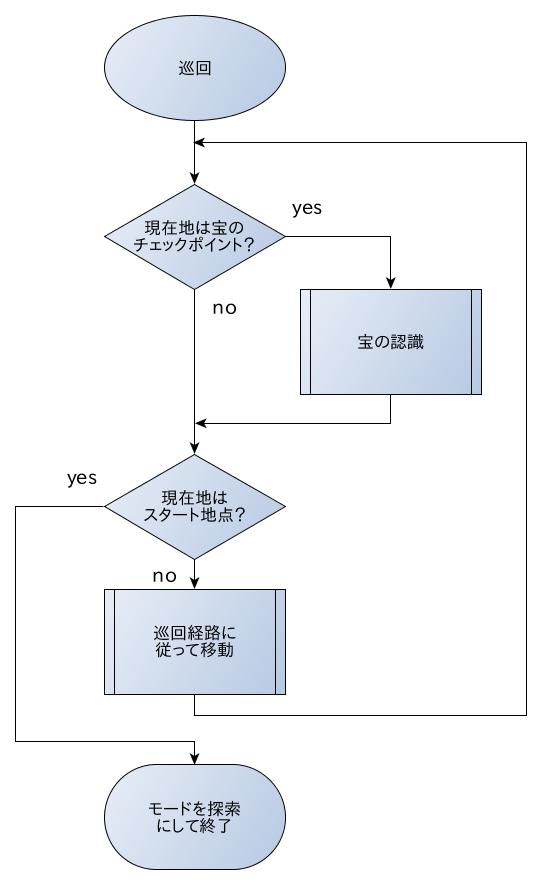
| void Mirs::start() | 巡回を開始する |
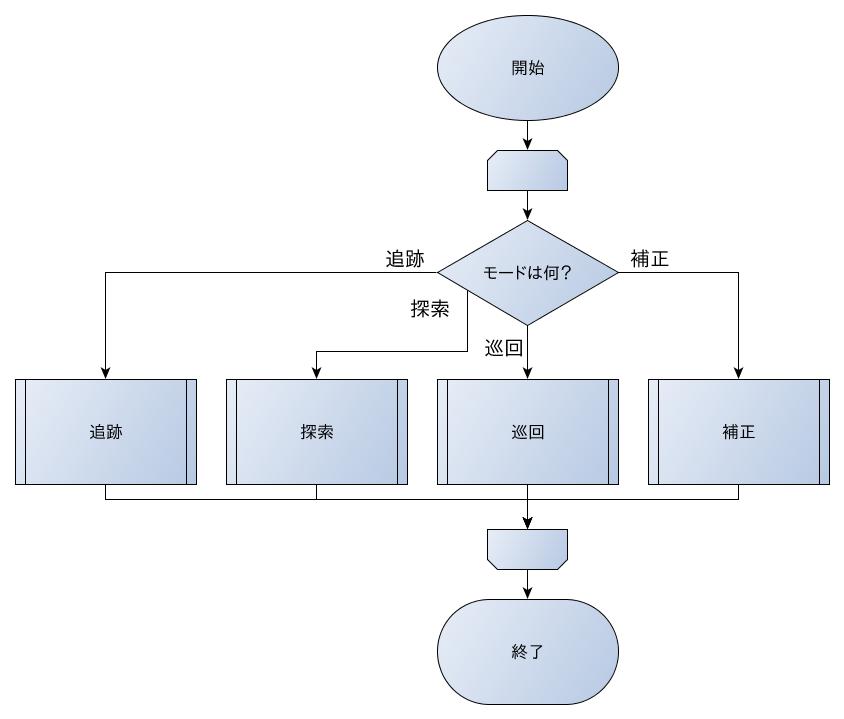
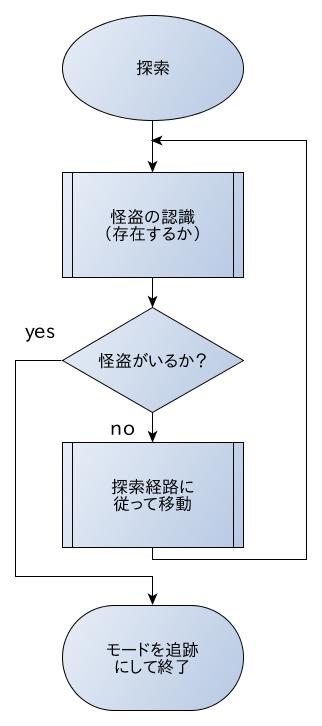
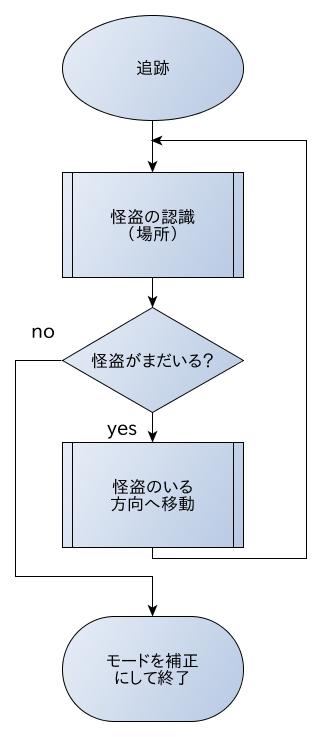
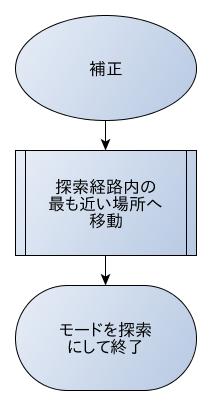
| void Mirs::controllerThread(MotorController& mc, UssThread& uss, ImageThread& imagethread, FpgaIO& fpgaio, Field& field, Route& route) | 行動決定を行う。 |
| Motor::Motor(const char* fd_path,double tire_radius=57.0,double axis_radius=5.5,double rotaryencoder_pulley_radius_ratio=3.85,double rotaryencoder_resolvingpower_deg=1,char kp=55,char ki=5) | Motorクラスのコンストラクタ。ファイルディスクリプタのパスを引数にとる |
| void Motor::update() | ロータリーエンコーダの値を取得して進んだ距離に換算したものをメンバ変数(distance)に保存する |
| void Motor::clear() | ロータリーエンコーダの値(総回転角度)をクリアする |
| int Motor::control(uint8_t speed) | モータのスピードを指定する。 |
| bool Motor::isComplete(int dest, int complete=5) | 進んだ距離が、dest±completeの範囲に収まっているかを判定する |
| void Motor::brake() | モータを停止状態(スピードを0)にする。 |
| double getDistance() | メンバ変数distanceの値を返す |
| Motors::Motors(const char* fd_path_l,const char* fd_path_r,const char* mode) | Motorsクラスのコンストラクタ。modeによってVMotorかMotorのどちらを持つか決定する。modeは、"virtual"または"real"を指定する。 |
| void Motors::update() | ロータリーエンコーダの値を取得して進んだ距離に換算したものをメンバ変数(distance)に保存する |
| void Motors::clear() | ロータリーエンコーダの値(総回転角度)をクリアする |
| int Motors::control(uint8_t speed_l,uint8_t speed_r) | モータのスピードを指定する。 |
| bool Motors::isComplete(int dest_l,int dest_r, int complete=5) | 進んだ距離が、dest_r±complete,dest_l±completeの範囲に収まっているかを判定する |
| void Motors::brake() | モータを停止する。 |
| MotorControllerBase::MotorControllerBase(const char* l_motor_fd_path, const char* r_motor_fd_path, double two_tires_distance=304.0, int maxspeed=100) | MotorControllerBaseクラスのコンストラクタ。左右のモーターのファイルディスクリプタのパスと2つのタイヤ間の距離、指定できる最大のスピードを引数にとる。 |
| int MotorControllerBase::straight(double speed,double dest,int accomplishment=20,double kd=0,double kp=0,double ki=0) | 直進走行(左右のスピードを一定に保つ)。while(!mc.straight(...));のようにして呼ぶ。D制御のみを行う。kp、kiはサブクラスのメソッドと同じ引数で利用できるようにするためにとってある。 |
| int MotorControllerBase::rotate(double speed,double deg,accomplishment_deg=10,kd=0,kp=0,ki=0) | 回転する。accomplishment_degに角度を指定して、その角度以内であることを終了条件とする。 |
| Position::Position(double x,double y,double theta) | Positionクラスのコンストラクタ |
| double Position::getX() | xの値を得る |
| double Position::getY() | yの値を得る |
| double Position::getThetaRad() | thetaの値を得る[rad] |
| double Position::getThetaDeg() | thetaの値を得る[deg] |
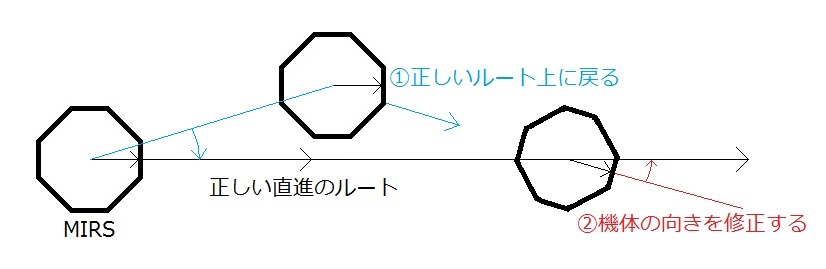
| int MotorController::straight(double speed,double dest,int accomplishment=20,double kd=0,double kp=0,double ki=0) | MotorControllerBaseのメソッドのオーバーライド。開始点から、角度を指定することで決まる直線に沿って、直進走行する。 |
| void MotorController::update() | Motorsのメソッドのオーバーライド。位置情報の更新も行うようにする。 |
| void MotorController::setStartPos(Position pos) | straightのための開始点の設定をする。 |
| UssThread::UssThread(const char *serialport,char uss_count) | UssThreadのコンストラクタ,ファイルディスクリプタのパスとUSSの個数を引数にとる |
| void Uss::startThread() | スレッドを開始する |
| void Uss::stopThread() | スレッドを終了する |
| int* Uss::getValues() | 距離計測の結果を要素数がuss_countとなる配列の先頭のポインタとして返す。エラー値は標準のプログラムと同じである |
| FpgaIO::FpgaIO(const char *fd_path) | FpgaIOのコンストラクタ |
| int FpgaIO::get(unsigned char num) | 指定した識別番号のセンサの値を得る |
| int FpgaIO::put(unsigned char* values) | 出力をvaluesにセットする。valuesは要素が4つの配列 |
| ImageThread::ImageThread() | ImageThreadのコンストラクタ。 |
| void ImageThread::startThread() | 画像処理を行うスレッドを開始する。画像処理の結果は、値取得用のメンバ関数を呼び出して、値を得る |
| void ImageThread::stopThread() | スレッドの終了処理を行う |
| void ImageThread::start(int mode) | スレッドが画像処理を行い始める。modeで"ball"か"number"を指定する。 番号はシステム基本設計書の定義に従う。 |
| void ImageThread::stop(int mode) | スレッドが画像処理を行うのを止める。modeで"ball"か"number"を指定する。 番号はシステム基本設計書の定義に従う。 |
| Position ImageThread::getBallPosFromMirs() | MIRSを原点としてMIRSの右方向をX軸正にとって、前方にy軸正をとったとき(相対座標系)の、ボールの座標を得る。 ボールが大きく異なる位置に複数存在した場合にはエラーとして、(0,0)を返す。 |
| char ImageThread::getNumber() | 数字認識の結果を得る。認識出来なかった場合には-1を返す。 |
| BallDetector::BallDetector() | BallDetectorのコンストラクタ。 |
| Position BallDetector::getPosFromMirs() | MIRSを原点としてMIRSの右方向をX軸正にとって、前方にy軸正をとったとき(相対座標系)の、ボールの座標を得る。 |
| void BallDetector::update() | ボールの認識を行って値を更新する。 |
| NumberDetector::NumberDetector() | NumberDetectorのコンストラクタ。 |
| char NumberDetector::get() | 数字認識の結果を得る。認識出来なかった場合には-1を返す。 |
| void BallDetector::update() | 数字の認識を行って値を更新する。 |
| Field::Field() | Fieldのコンストラクタ。 |
| int* Field::getObjectNear(const char* object_name, int x, int y, threshold_radius) | 半径threshold_radius以内でもっとも近い、名前がobject_nameであるデータを配列の先頭のポインタとして返す。なければNULLポインタを返す |
| Route::Route() | Routeのコンストラクタ。 |
| int* Route::get() | 次の行き先を得る。 |
| int* Route::next() | 経路情報を参照している行を1つ進める。 |
| int* Route::previous() | 経路情報を参照している行を1つ戻す。 |
| int* Route::getAndNext() | 次の行き先を得ると同時に経路情報を参照している行を1つ進める |
| int* Route::seek(int index) | 経路情報を参照している行を任意の行に移す。 |
| int* Route::searchNear(int x, int y) | 最も近い経路上の点を返す。 |
#ifdef NDEBUG #define debug_printf(...) #else #define debug_printf(...) printf(__VA_ARGS__) #endifを定義する。これは、デバッグ時以外はプログラムから削除される出力として使うことができる。