はじめに
本ドキュメントは、MIRS1301開発の分析と総括をまとめたものである。
結果
エレキ故障ゼロを達成しました
| 体験入学時の標準機競技 | 1位 |
|---|---|
| 高専祭でのポスター投票 | 1位 |
| MIRS競技会本番 | 1位 |
| 競技会アンケート |
1位(どの班のMIRSが気に入りましたか。) 1位(どの班のプレゼン・パンフレットがよかったですか。) 1位(どの班のアイディアがよかったですか。) |
開発スケジュール分析
今回の開発スケジュールと実際の作業記録へのリンクを以下に示す。
開発スケジュール
実際の作業記録
メカ (達成率 70%)
基本設計書で予定していたスケージュールでは冬休みまでに機体が組み上がる予定であった。
しかし実際には冬休み明けも仕様変更が続き、基板やカメラ、外装パーツ等の増設・位置修正が行われている。
加工にかかった時間は予定より短かったので、設計に当てた時間が不十分だったと言える。
設計の甘さが露呈した反面、仕様変更への高い柔軟性も確認された。
部品固定用のネジ穴を予め上段ラックに多数用意したことと、
基板を小型化しネジ穴間隔を統一したことが、主な理由である。
これにより、立体的な部品配置および設置位置の微調整が可能になった。
以上により達成率は70%と判断する。
エレキ (達成率 90%)
方針上のミスとして赤外線センサーを結局利用しなかったことがあるものの、
他の部分は概ね問題なく作業が進んだと言える。
基板作成の順番は予定していたものと異なる部分があるものの、
LEDボードを除いて全てのPIC基板のハンダ付けが予定より早く終了している。
なお、パターン図の設計までは予定通りのスケジュールか、むしろ予定よりも遅れており、
基板の加工と実装にかかった時間が予定より短かったことで巻き返すことができている。
競技会本番までエレキ面で大きな故障が一切発生しなかったこともあり、
PICプログラムのデバッグに時間をかけることができている。
以上により達成率は90%と判断する。
ソフト (達成率 60%)
画像処理プログラムは、宝認識プログラムの作成を中止し、
怪盗認識プログラムの改良とデバッグに時間をかけたため無事完成した。
一方で巡回・追跡プログラムは開発が遅れ、本番までに完成しなかった。
原因は、新規基板との通信プログラムに時間をかけすぎてしまったことと、
ソフトウェアの設計が不十分でソフト班内の作業分担がうまくできなかったことである。
巡回・追跡はできなかったものの、
通信・画像処理のプログラムは完成したので、
達成率は60%と判断する。
工数分析
担当別
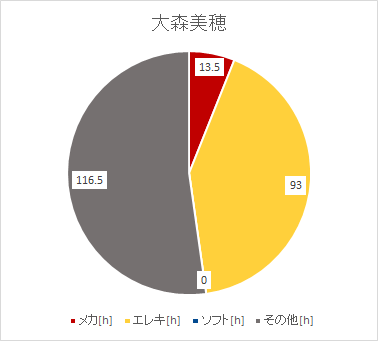
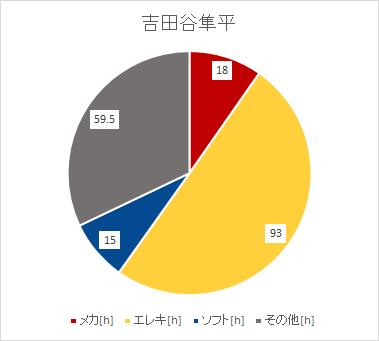
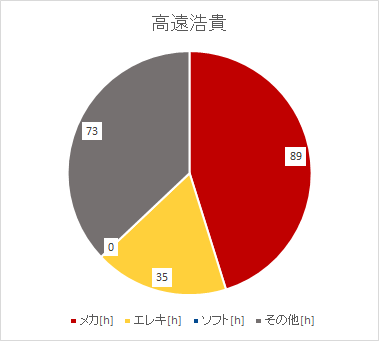
各班員の作業時間[h]を、
メカ・エレキ・ソフト・その他(外装・ドキュメント整備など)に分類して集計したものを以下の表・図に示す。
名前 担当 メカ[h] エレキ[h] ソフト[h] その他[h] 合計[h] 高原一真 ソフト・エレキ 57.5 134.5 277.5 79 548.5 筧雄一郎 ソフト 30 31.5 141 27.5 230 鈴木智也 ソフト・メカ 40 32.5 88 79.5 240 岩田大輝 エレキ 12.5 117 0 59 188.5 大森美穂 エレキ 13.5 93 0 116.5 223 吉田谷隼平 エレキ 18 93 15 59.5 185.5 高遠浩貴 メカ 89 35 0 73 197 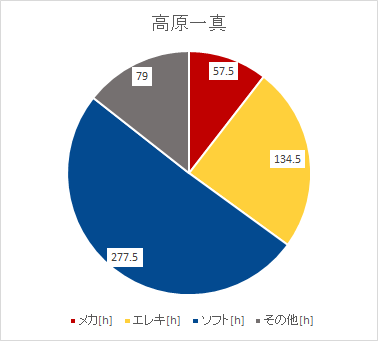
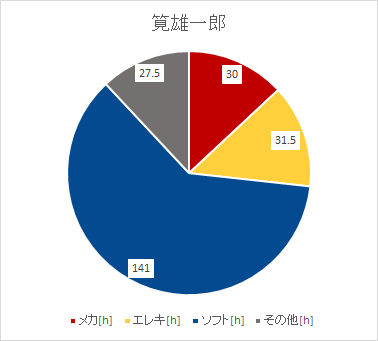
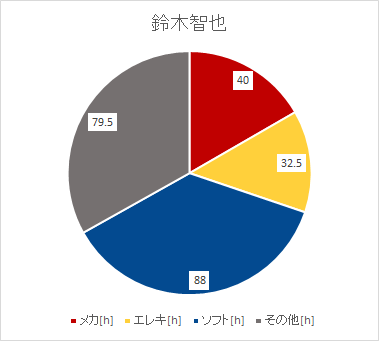
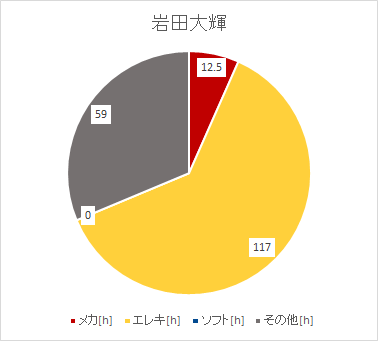
赤: メカ
黄: エレキ
青: ソフト
灰: その他作業時間を担当別でまとめたものを以下に示す。
なお、エレキ・ソフトのように担当を兼任している場合は、
エレキの作業時間をエレキ班に、ソフトの作業時間をソフト班に、残りは半分づつ分配してある。
個人別のグラフを見ると、それぞれの担当分野の作業時間が最も多くなっていることが分かる。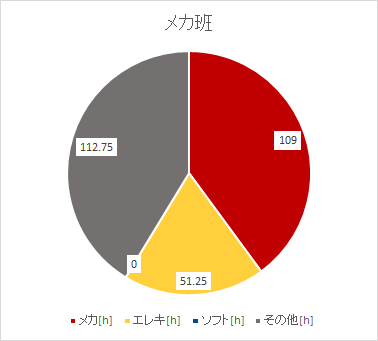
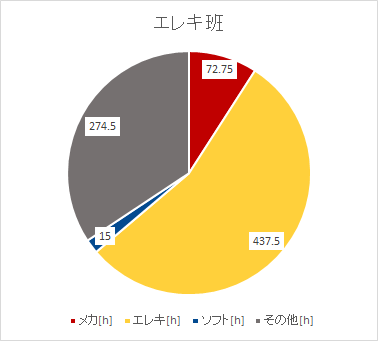
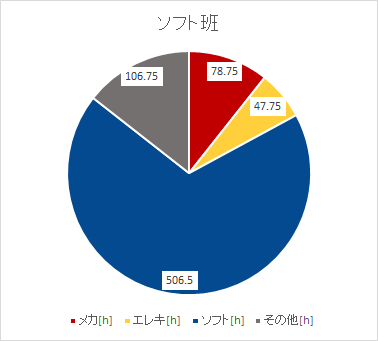
また班別のグラフを見ても、各担当分野の作業時間は他の分野のものの数倍の時間になっており、 分担は適切に行われていたと言える。
したがってメカ・エレキ・ソフトの3種類で見た時の分担は、正常に行われていたと言える。
なお、メカ班がエレキ関連の作業に費やした時間が若干多いものの、
純粋なメカ班はすでに一人しかいないため、これ以上の改善は難しいものと考えられる。
全体
MIRS1301班全体の作業時間の内訳を以下に示す。
このグラフを見ると、エレキとソフトの作業時間が同程度で、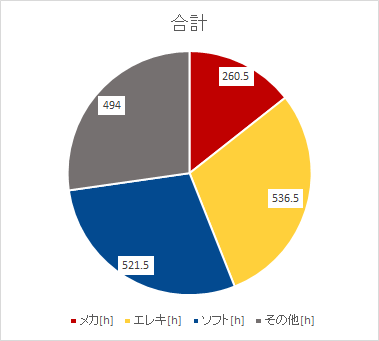
メカ関連がその半分程度の時間であったことが分かる。
この結果から、メカ1人、エレキ3人、ソフト3人の分担は妥当であったと判断できる。
総括
全体(マネージャー)
MIRS1301最大のアピール点である「通信革命」については、
全てのPIC基板がI2C通信に対応し正常動作を確認した時点で成功したと考えています。
重要視していた「拡張性」「流用性」「整備性」の向上についても、 実体験として確かめることができました。
またLED提灯などの装飾品が充実したこともあり、 競技会本番におけるエンターテイメント性も兼ね備えることができました。
結果として、こういった面においてはMIRS1301は成功を収めたと言えます。
一方、そのためにマネージャーがエレキ・ソフトの作業を背負い込む場面が多くありました。
これによりスケジュール管理に支障が発生し、 本番用のソフトウェアが完成しなくなる事態となりました。
スケジュール管理の結果には、改善の余地が多く残されていると判断しています。
人材管理は最終的にはうまく行きましたが、
各班員の自主性に頼りすぎたと感じています。
メカ
各部品の加工自体は特に問題なく進むことができた。
しかし、設計にかけた時間があまり多くなかったので、
エレキやソフトとの意見交換により、 穴の位置やシャーシを随時改善していくという結果になった。
今回は、シャーシが円形ということもあり、タッチセンサーを増やし、 バンパーを小さくし枚数を増やすという方法をとった。
すべてのタッチセンサーが無事動くことができよかったと思う。
また基盤取り付け用の板も、うまく基盤が取り付けられていて安心した。
改善点としては、設計に時間をもう少しかけたほうがよかったと感じている。
エレキ
通信方式をI2Cに変更したため、 電源ボード以外の全ての基盤を作り直した。
新たにI2Cマスターボードを追加し、 FPGAボード、ドータボードは必要なくなったので使用していない。
また、超音波センサは去年のMIRSからの引継ぎで既製品があったのでそれを使用した。
PICkit2/3をPICのプログラム書き換えに用いるために、 PICを使用している全ての基盤へ専用のコネクタを用意した。
これにより、PICを抜き差しすることがなくなり、 プログラム書き換えの時間短縮やPICの足が曲がってしまう等のトラブルを無くすことができた。
プリント基盤に開ける固定用の穴の間隔を15mmに統一することにより、MIRS本体への配置の自由度が向上した。
ケーブル作成について
丁寧なほど綺麗な仕上がりになって丈夫になる。
取り付けるコネクタの向きを統一すると、いざ繋いだ時の間違いが無くなっていいと思います。
MIRS1301ではGNDが必ず左端になっていたので、それに合わせてケーブルも作りました。
基盤加工、導通チェックについて
基盤加工機を使うときは、裏表が逆になってしまわないように注意する。
裏表逆でも案外気付きにくいので、実装した様子を思い浮かべながら確認する。
たとえ導通チェックで大丈夫だったにしても、 基盤加工で出る溝に入った屑はきっちりと落とすこと。
(やらないと半田付けした時にショートする可能性が高いです。)
プリント基板の外形のバリ取りは紙やすりが一番手早くできて仕上がりが綺麗です。
回路の溝のバリはカッターで削るかティッシュでこするといい感じ。
基盤実装
半田は細いやつの方が断然つけ易いです。
半田は熱い場所にしか流れないので、 ランドや素子の足に付かないと思ったらその部分を暖めると無事その場所に流れていきます。
ランドと素子の足を同時にしっかり暖めるのが半田付けのコツだと思います。
半田ごてで暖めるぐらいじゃランドは剥がれません。
ただ、半田を流し込んだ後にやたらといじくるとランドは剥がれます。
足が沢山あるコネクタやICソケットは真ん中辺りを一箇所半田付けし、
指で実装面からコネクタを押さえつつ半田付けした箇所の半田を再び溶かすと、 浮いてしまうことなくピタッと固定できます。お試しあれ。
ソフト
画像処理について
画像取得し、赤色(青色)抽出、二値化の順に処理を進めていく。
この後の処理にはいくつかあり、円検出、重心検出、ラベリングなどがある。
円検出やラベリングはシングルコアのCPUには負担が大きく、 処理時間が0.5秒以上かかってしまった。
怪盗機の発見には画像処理してから偏角を計算し、 モータを動かすので非常に速い処理時間が求められる。
その結果、二値化した画像の白色の部分の重心を計算し、それをボールの重心とした。
この処理だとパラメータに大きく依存し、さらに精度は正確ではなくなる。
しかし、精度より速さを重視した方が良いということで、できる限りプログラムを簡単にした。
PIC関連
今回はソフトウェアの面で通信エラー対策を行い、
コネクタの瞬間的な接触不良に対する耐性は完璧に近いものになりました。
通信方式の統一によりプログラムに統一感が出て、読みやすいコードになったと思います。
走行・巡回関連
競技会本番では、巡回途中で行動不能になってしまいました。
これは、タッチセンサーによる自己位置の補正に失敗したためです。
開発スケジュールの遅れによるデバッグ時間の不足が最大の原因だと考えています。
基本的な走行制御と、マップデータを使用した走行ルート算出のプログラムは完成しました。
追跡関連
画像処理プログラムと走行プログラムの統合が遅れたり、
追跡の前の巡回の時点で失敗してしまったりで、追跡することはできませんでした。
画像処理プログラムが余裕を持って完成していたので非常に残念です。
感想
筧雄一郎
MIRS1301ではソフトウェアを担当し、画像処理を主に任された。
他のソフトの人たちは通信革命を起こすための通信の制御、巡回のプログラムなどを作成していた。
マネージャーの高原はロボットの経験と知識が人並み以上で心強く、
じゅんちゃんはロボコンのソフト担当ということで、私のデバックに協力してくれた。
経験と知識が乏しい私がこのMIRS1301のソフト班として活動できたのは2人のおかげだった。
本当にありがとう。
画像処理は牛丸先生の実験で行っていたため、Opencvを使用すれば良いことは知っていた。
Opencvにはいくつかのバージョンがあり、バージョンが違うだけで互換性が失われたりすることが難点だった。
そのため、Opencvのリファレンスを何度も見て関数の理解を深めた。
また、MIRS実機の性能が低いので、複雑な処理をした際には非常に処理時間がかかってしまう。
マネージャーと相談した結果、パラメータに大きく依存する処理時間の短いプログラムを作成した。
処理時間は平均して0.15秒程度で、非常に早かった。
しかし、残念ながらMIRS競技会ではカメラデバイスの不具合により、カメラによる怪盗機発見は成し得なかった。
(この原因は後にUSBハブによるものだと予想された。)
競技会では高原のマッピングと方位センサの補正を用いた巡回プログラムのおかげで優勝することができた。
この優勝はリーダーシップのある高原、頼り甲斐のある班員がいたからこそ成り得たものだと思う。
みんな1年間お疲れ様。
鈴木智也
ソフト担当として1年間MIRSをやってきました。
作成したプログラムは超音波センサとLEDです。
超音波センサのプログラムはとても時間がかかりました。
あれがおかしい、ここがおかしいと、少しずつ改善しなからプログラムは完成しました。
しかし、テスト用にArduinoとI2C通信させることはできませんでした。
また、ロボコン部でも超音波センサのプログラムをやったことがありますが、
その時と今回のMIRSとを比べると、既製品はすごく便利だと思いました。
LEDに関しては吉田谷が点灯パターンのプログラムを書きました。
僕はそれらを指定するプログラムを書きました。これは特に悩むことはなかったです。
ただ、LEDをシフトさせていく動作がうまくいかず、直接指定することになったのが心残りです。
ソフト担当なのですが、雑用(という名のメカ作業やCPの手伝いとか)も結構やっていました。
特に、終盤あたりに多くなりました。ソフトとしてどうなのって思ったことはあります。
しかし、チームやMIRS競技会のためになったので悪いことではないと思います。
このMIRSを通じて得たことは、今後のことに活かせるようにしたいと思います。
同じMIRS1301のメンバーになったみんなと担当教員の青木先生、1年間ありがとうございました。
岩田大輝
私はエレキ担当として主に基盤や3PINのコネクタに使う配線などを作成しました。
正直なところ、私は回路設計が苦手で素子働きも忘れてしまっていて
役立ずのまま終わってしまうのではないかと心配していました。
ただ、考えていくうちに初歩的なことは思い出していき、
モータを初めどの基盤もある程度は理解することができました。
また、HTMLも3年で習ったときは訳がわかりませんでしたが、
今では1人でも詳細設計を書く事ができるようになりました。
モータコントロールボードをフォトカプラを二つ減らして制御するときは正直、
モータが焼けると思っていましたが大丈夫だったので少し安心しましたし、
大幅に回路のスペース削減に成功して嬉しかったです。
最初はこの班は高原がいなかったら成り立たないと思っていましたが
他の班も見ていてメンバーもそれなりにスペックが高かったので成功したんだと感じました。
大森美穂
頭は使わなかったけれど、とにかく手先を動かしている一年でした。
唯一の心残りはHPを外枠作って満足してしまって中身が作れなかったことです。
HP製作は初めてだったので、やりたいことを片っ端から検索しつつの作業でした。
いつか自分のHPを作ってみたいなと思いました。
HP、ポスター、パンフレット、リーフレット、MIRS装飾品などデザインばかりやっていました。
おかげ様でポスターなどの広告のデザイン、GIMP、powerpointを扱う力は1年前に比べて大分ついたと思います。
製作中は色々な人にお世話になりました。ありがとうございます。高専祭では無事1番を取れました。
細かい作業、紙とはさみを使って何かつくるのは元々好きで、オリジナルMIRSを作り始めてからは、
自分の好きな事しかやっていないようなものだったのでとても楽しかったです。
半田付けも綺麗にできるようになって、3年で苦労したのが嘘のようです。
今ならあの基盤も1日かからずにもっと綺麗にできる…。
LED提灯に関してはもう心残りも言い残すことも何もないです。
自分でもあそこまで提灯らしくなるとは思ってませんでした。
ずっと言っていた通信革命も達成できて、優勝もできて、良かったです。
MIRS開発という面では役に立たなかったと思いますが、私なりには満足できた1年でした。
ありがとうございました。
吉田谷隼平
まずドキュメントマネージャーとしての仕事を振り返ってだが、
ドキュメントの作成が決められてから管理台帳に上げる仕事はスムーズに行えた。
エレキの仕事については、I2Cに通信規格を統一する関係ですべての基盤を新規設計するという大仕事に臨んだ。
私は主に基盤加工機を使用した、パターン図の作成から加工までの仕事を担当した。
基盤加工機の使い方や回路図の読み方などは当初のほぼゼロに近い知識に比べたら格段にレベルアップしたと感じる。
特に、基盤加工機の使い方については他者に教えられるレベルにまで達した。
他には、はんだ付けの技術の向上があげられる。
最初に作ったドータボードは、はんだ付けに時間もかかり、また失敗やショート箇所も多かった。
しかし、多くの基盤のはんだ付けを通じて、より早く、正確なはんだ付けができるようになった。
最後に1年間のMIRS全体を通しての感想と批判をする。
私個人としては、授業外の作業時間が少なかったと感じる。
極力授業内に自分の仕事を終わらせられるように努力した成果でもあるのだが、
ほかの仕事の手伝いをして班員の負担を軽減するくらいのことはできたと思う。
自分で仕事を探す能力の低さを痛感した。
しかし、作成した基盤が後で壊れるということがなかったため、
自分の仕事はしっかりできたと自負している。
高遠浩貴
MIRSでは、1年を通して主にメカを担当した。
今回私たちのMIRSではあまりメカを改造しないということで一人でメカを任されることになった。
当初は加工のみということで、MIRSに残業もなく余裕をもって仕事をしていたが、予定が変更となり設計から行うことになった。
そのため、冬休み前後の活動がとても大変だった。
作業を行っているときは制御工学の再評価もあり地獄を見ているようだった。
設計書を主に一人で書き、一人でレビューをし、一人で罫書きをし、加工をすることは大変だがとても貴重な経験になったと思う。
そして、マネージャもこのぐらい大変なんだろうということを悟った。
だが、自分の作成したものが動いているところを見たときはとても感動した。また、やっていてよかったと感じた。
最後に、MIRS1301のメンバーは一年間本当にお疲れ様でした。
高原一真
MIRS1301のマネージャーを担当させていただきました。
いざ結果を振り返ってみれば、通信革命成功のみならず、
「体験入学の競技会」「高専祭のポスター投票」 「競技会本番」「競技会アンケートの全3項目」
で軒並み1位と、なんだか信じられないことになっています。
マネージャーとしての仕事以外では、新規基板の回路設計およびソフトウェア開発を主に行いましたが、
実を言うと夏休み明けまでは、今年はソフトに専念するつもりでした。
基本提案書で「全PIC基板をI2Cに対応させる」などと言い出してしまったのが全ての原因です。
高専祭のポスター発表で「絶対やります!」と盛大に啖呵を切った時から、
「できる限り頑張る」だった案が「全部やるしかない」という信念に変わりました。
高専祭のポスター発表と競技会本番のプレゼンテーションも、本当にいい経験になりました。
緊張による眩暈で妙な高揚感に包まれ、大勢の前で好きなものの話をすることの楽しさを知りました。
通信革命を打ち出したことに対して後悔は微塵もありません。大満足です。
ただ、一年間好き勝手やって班員を振り回して、かなり迷惑をかけたと思います。
特に、スケジュール管理を蔑ろにしてしまった点は言い訳のしようもありません。
本当にすみませんでした。反省しています。
最後にマネージャーから見た各班員について。
高遠 高遠は、予想通り要領の良さと作業の速さが頼りになりました。
唯一のメカ担当というのはかなりの激務だったと思います。
ケガキと加工をほぼ一晩で終わらせてくれたときは驚愕しました。
筧 筧は、画像処理関連の作業を一人でこなしてくれました。
情報収集・設計・コーディングまで全て任せきりにできたので、かなり助かりました。
せっかく高速化した画像処理のプログラムなのに、本番で活かせなくて申し訳ない。
岩田 岩田は、うちのエレキ班を体現しているような気がします。
与えられた仕事を要求より早く、質を落とさずこなしてくれました。
LED提灯の設計を含め、いつもいつの間にか仕事が終わっていました。
大森 大森さんは、ハンダ付けだけ見ても素晴らしい速さと精度でこなしてくれました。
しかし、なんといってもLED提灯や旗、バンパーなどの装飾品のデザインセンスが抜群でした。
どれもこれも圧巻の出来栄えです。
吉田谷 吉田谷は、基板加工機関連の仕事を一手に引き受けてくれたおかげで、
最終的にD4最高の加工機使いになりました。
与えられた仕事を定時までに終わらせる能力が高かったです。
鈴木 じゅんちゃんは、一緒に作業した時間が一番長いはずです。
USSボード以外に大きな担当が無かったので他の班から見ると活躍が目立ちませんが、
分野を問わずとにかくなんでもやってくれて、人手不足のときに頼りになりました。
メカ・エレキ・ソフトの独立性が高くなったMIRS1301において、
各分野の隙間を埋めるD科らしい活躍をしてくれたと思います。
全体的に見て、要領が良く作業の速いメンバーに恵まれた班だったと思います。
入学当初から憧れてきたMIRSのマネージャーとして、
このメンバーと一緒に優勝できたことを本当に嬉しく思います。
1年間ありがとうございました。お疲れ様でした。