| 名称 |
MIRS1205 システム提案書 |
| 番号 |
MIRS1205-DSGN-0001 |
最終更新日:2012.11.12
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2012.11.12 |
佐野徳美 |
牛丸教員 |
初版 |
目次
1.はじめに
-
本ドキュメントは、MIRS1205オリジナルマシンのシステムを提案するドキュメントである。
2.システム概略
-
確実なゴールを目指すという目標をもとに開発をしていく。
ハードウェアに関しては、プレ競技会での結果をもとに、トラブルが発生しにくいハードの構成を目指す。
ソフトウェアに関しては、なるべく予期しない動作を発生させない堅実なプログラムの設計を目標とする。
以下に変更案を示す。
- メカトロニクス
- 下段シャーシにサスペンションの追加:
- ステップ、シーソー攻略の為。ただし、サスの高さに合わせて、モーターの位置を変更する。白線センサをフロントサスの先端につけ白線との距離を一定にする。また、重心位置が高くなるので、その点に気を付けた部品配置を考える。
- モーターの新規購入:
- 標準のモーターとロータリーエンコーダはゴムでつながっているため、劣化が起きやすく正確な値が取れないことが多々ある。そのためエンコーダ内蔵型モーターの購入を検討している。
- モーターのギヤ比の変更:
- MIRS1205班はシャーシの小型化、軽量化は行わない予定なので、初動や停止時の慣性によるエンコーダのズレを防ぐため、ギヤ比を変えてトルクを大きくする予定である。
- バンパーの変更:
- 現バンパーでは感知できない部分が存在するので、形状を変更する予定。具体的な形状はまだ決まっていないが、これからMIRSの動きをみて変更する形状を考える。
- エレクトロニクス
- 超音波センサの追加: 正対補正に使用する為。現時点で存在しないため新規制作する必要がある。
- 超音波センサの変更: より近距離を測定できる超音波センサの購入も検討している。購入する場合上記の追加は不要。
- MTCBとの変更: 電力供給を安定させるためにコネクタをDCジャックに変更予定。コネクタ接合部の基盤が傷んでいて接触不良が起きる場合、新規作成。
- ソフトウェア
- 各種関数の追加:関数の数は増えてしまうが、動作不良を防ぐために多少重複している部分があっても別関数として定義する。
3.システム外観図
-
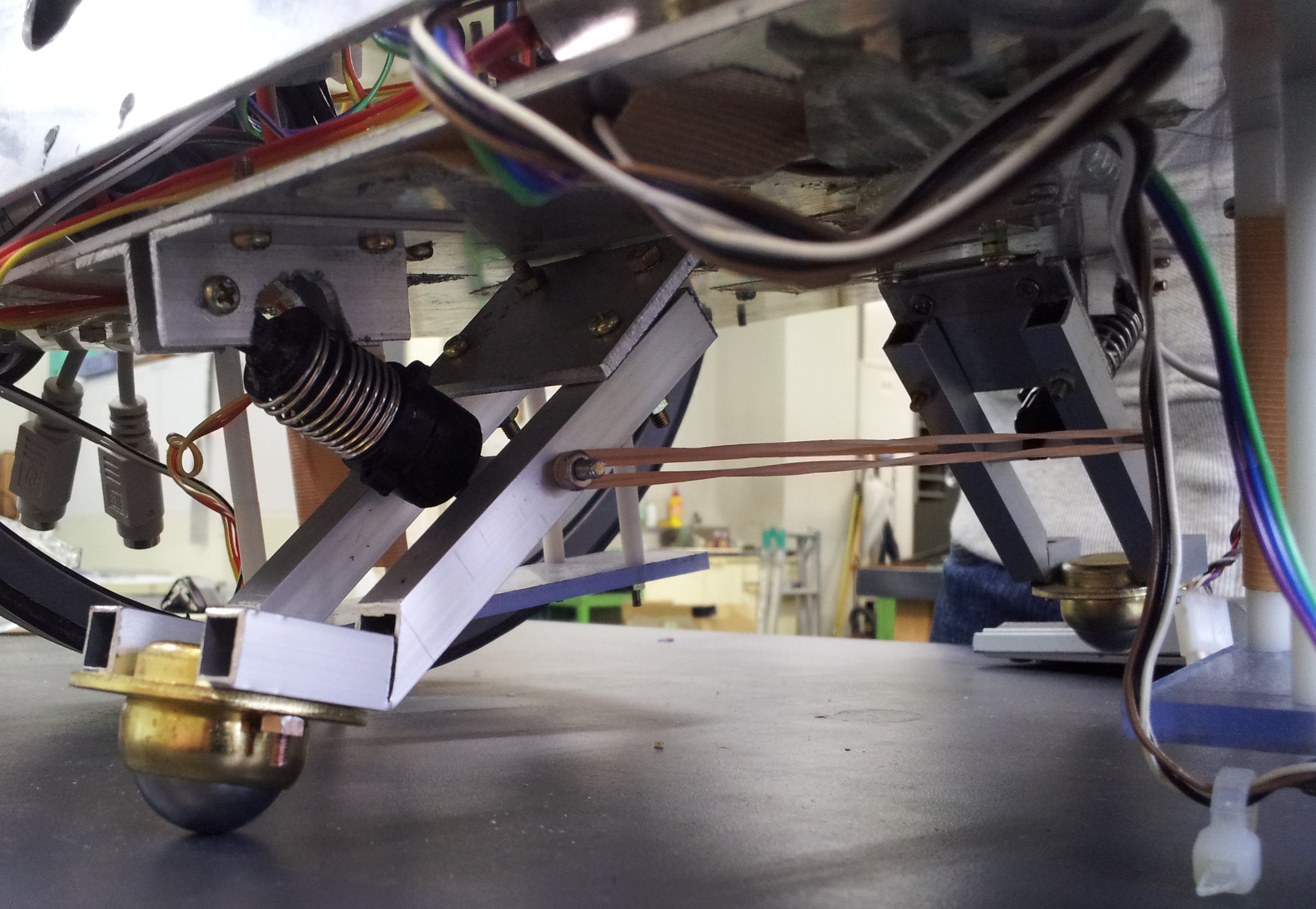
MIRS1205のMIRSが使用するサスペンションの機構は、MIRS1001のサスペンションを採用する。但し、寸法はMIRS1205に合うように変更する。
下に示すのは、MIRS1001のサスペンションの写真である。

|
|
|
図1 バネが伸びた状態(通常走行時)
|
図2 バネが縮んだ状態(シーソー乗り上げ時)
|
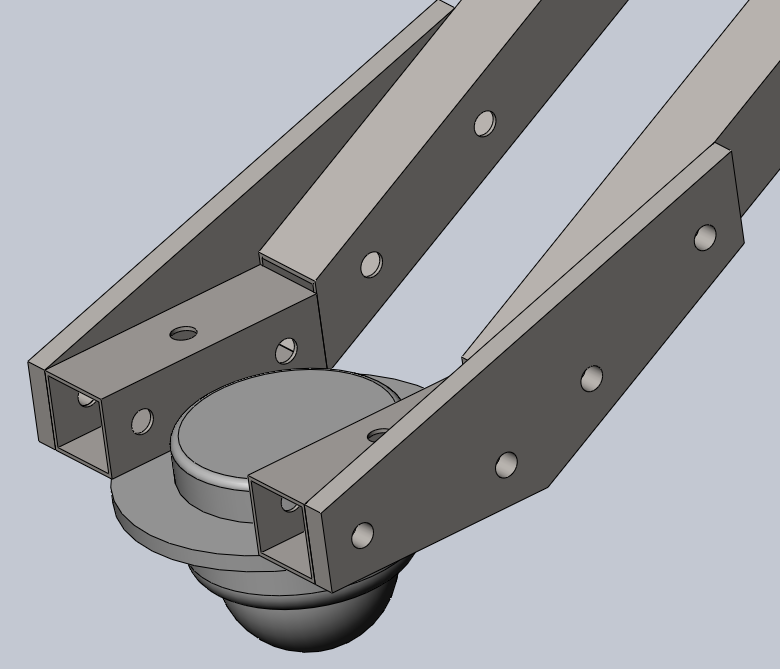
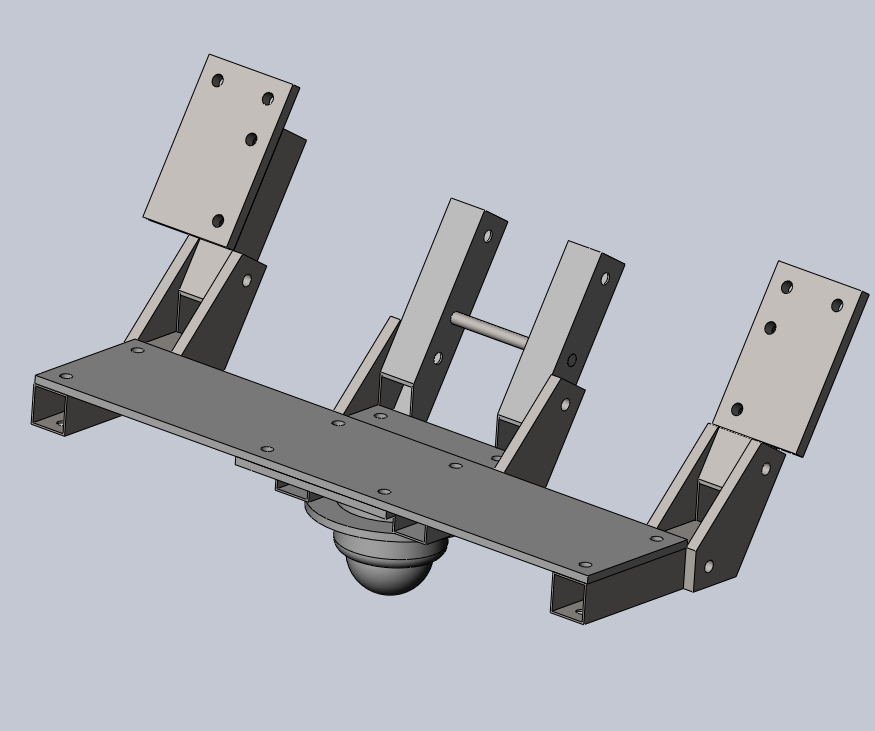
現存のサスペンションでは強度の不安がみられるため、補強を加えたサスペンションのモデルを以下に示す。
|
|
|
図3 補強を加えたフロントサス
|
図4 補強を加えたリアサス
|
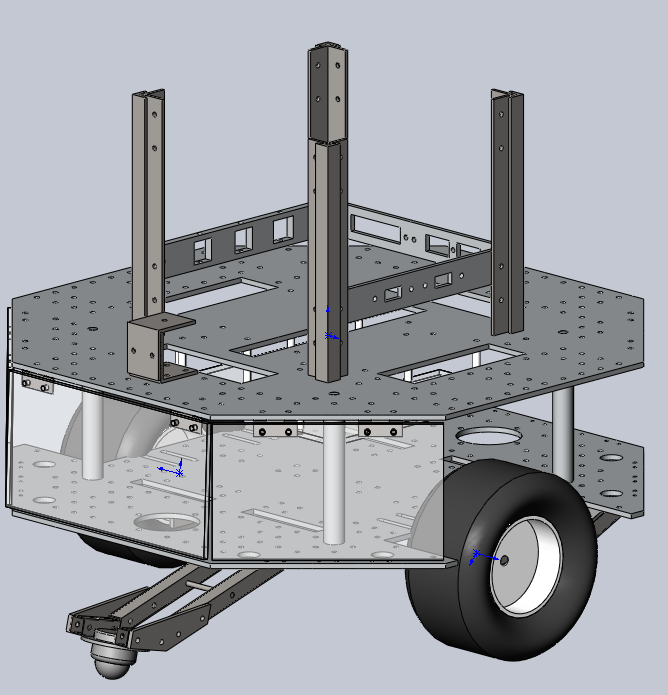
補強サスを組み込んだ全体の外観図を以下に示す。
|
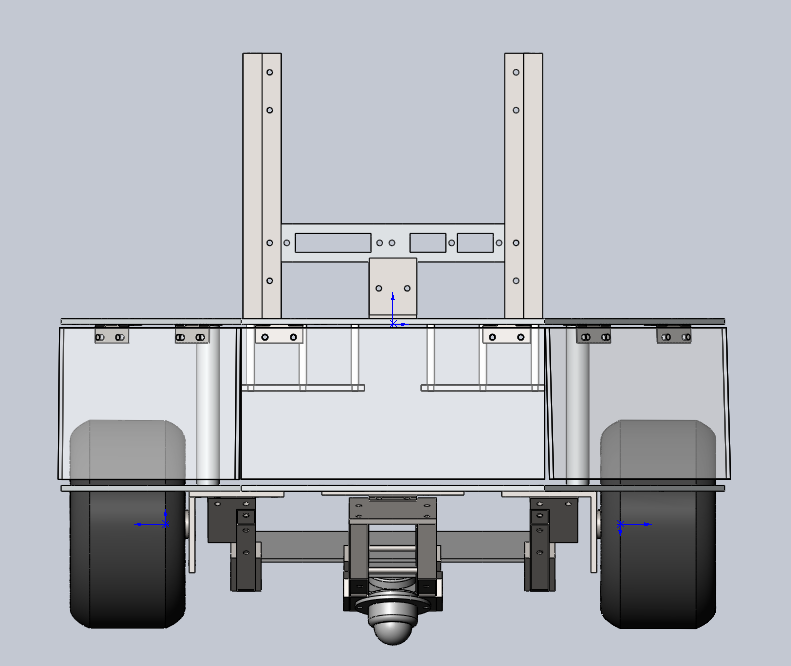
|
|
図5 全体の外観図
|
図6 全体の外観図(正面)
|
4.コース攻略方針
-
「確実にゴールする」
以下に「確実にゴールする」に基づいた攻略方針を示す。
通路・ステップ・シーソー
- エンコーダ、超音波センサ、タッチセンサを用いながら走行する。走行中超音波センサによる補正を行う。
⇒サスペンション、超音波センサの追加もしくは変更、モーター、エンコーダの変更(予定)
DB
- Webカメラを安定させるために、起動するときはすべてのスレッドを閉じる。
認識できるまで本体の位置を調整し、攻略する。
優先順位は、ゴール・扉・小部屋・ロータリー・鍵・行き止まりとする。
緊急走行
- カメラでの画像認識ができなかった場合を考えた保険としての走行関数の追加を考えている。次のDBまで左伝いに走行を行い、仕掛けをクリアする。
ゴール
- 領域内で停止し、パフォーマンスを行う。
鍵・扉
- 時間内のゴールを目指すために、基本的に鍵は攻略しない。
小部屋
- 壁伝いに出口を探しながら走行し、攻略する。
ロータリー
- 超音波センサで出口を探しながらロータリー走行をし、攻略する。ロータリーの場合、超音波の値がとびやすいので90°ずつ停止して超音波計測を行う。
行き止まり
- 画像認識で行き止まりは回避するようにする予定。
しかし画像認識が失敗した場合を考慮し、前タッチセンサが反応→後退して補正のループを繰り返す場合、行き止まりと判断して180°回転して通路走行に戻るアルゴリズムの組み込みを考えている。
5.関連文書
- 競技用ソフトウェア開発計画書
沼津工業高等専門学校 電子制御工学科