5.摦嶌偺棳傟
僾儘僌儔儉偺僼儘乕僠儍乕僩傪壓恾偵帵偡丅MIRS1205偱偼丄奺婡擻傪儌僕儏乕儖壔偟偰丄昁梫偵墳偠偰屇傃弌偡宍傪庢傞丅奺婡擻偺摦嶌偺棳傟偼婡擻掕媊偱帵偡丅
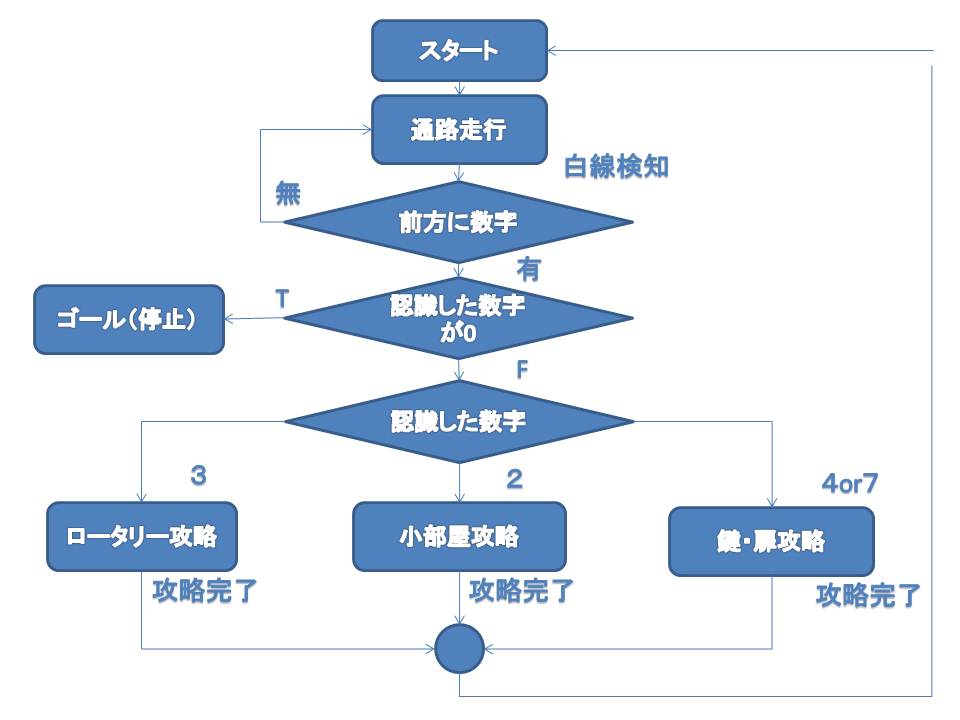
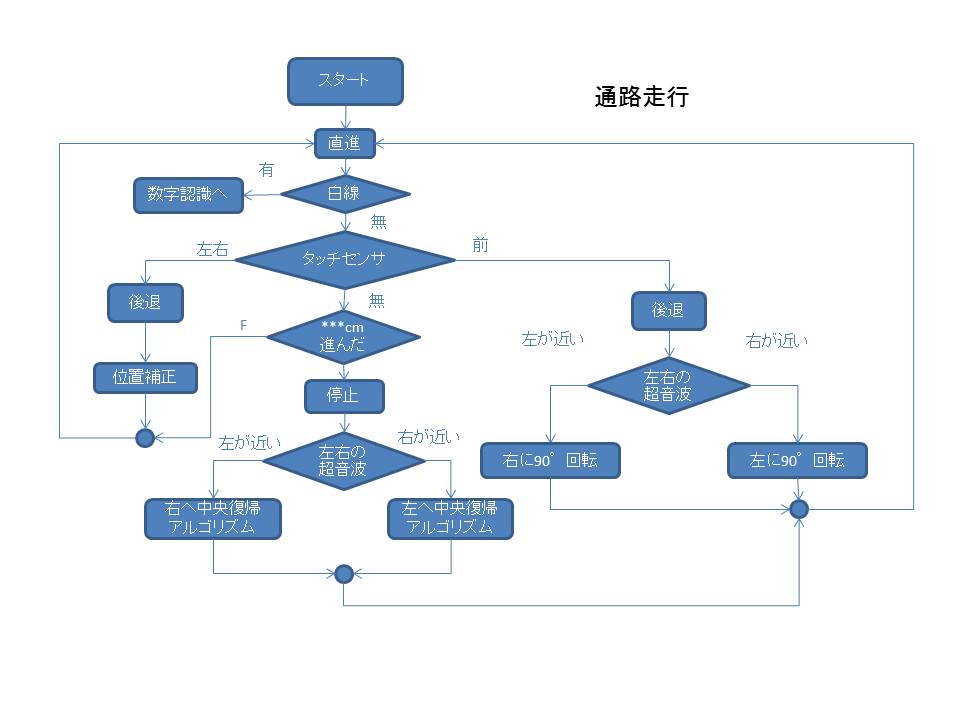
- 捠楬憱峴
- 慜曽偺僞僢僠僙儞僒偲挻壒攇僙儞僒偵傛傝T帤楬丒嬋偑傝妏丒峴偒巭傑傝傪専抦偡傞
- 嬋偑傝妏偺応崌偼丄偦偺応偱90亱夞揮偟丄憱峴
- 捈恑偺応崌偼丄挻壒攇僙儞僒傗儘乕僞儕乕僄儞僐乕僟側偳傪巊梡偟丄暻偵愙怗偟側偄傛偆偵憱峴偡傞丅
- 暻偵愙怗偟偨応崌丄屻戅偟挻壒攇寁應偱廃傝偺忬嫷傪寁應偟偰岦偒傪曄峏偡傞丅
- Direction Board
- 敀慄傪擣幆偡傞丅
- 夋憸傪惓妋偵庢摼偡傞偨傔偵惓懳曗惓傪峴偆丅
- 夋憸傪庢摼偟丄悢帤擣幆張棟傪峴偆丅
- 惓偟偔擣幆偱偒偨応崌佀5.偵堏峴
惓偟偔擣幆偱偒側偐偭偨応崌佀2.偵栠傞 - 偁傜偐偠傔寛傔偰偍偄偨桪愭搙偵廬偄丄峌棯偡傞巇妡偗傪慖戰偟捠楬摦嶌偵堏峴偡傞丅尞丒斷偺桪愭搙偼嵟掅偵偟偰偍偔丅
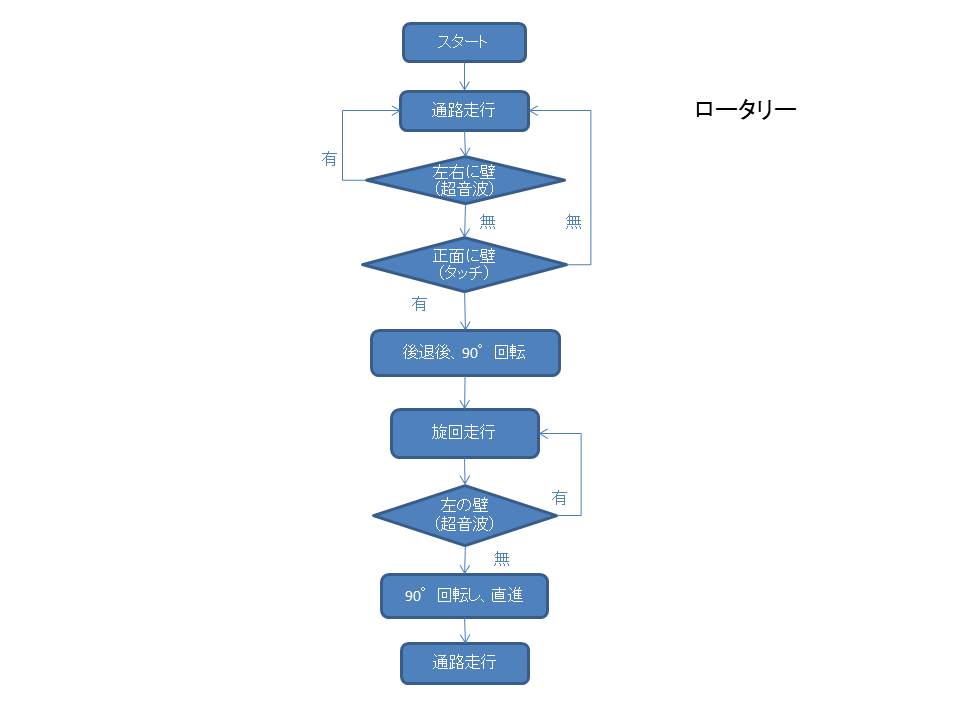
- 儘乕僞儕乕
- Direction Board偱幆暿屻丄儘乕僞儕乕偵怤擖偟偨偙偲傪挻壒攇僙儞僒偱敾抐
- 儘乕僞儕乕偵怤擖屻偦偺応偱90亱夞揮偟丄彮偟儘乕僞儕乕憱峴偡傞丅
- 挻壒攇僙儞僒傪梡偄偰丄弌岥傪扵偟側偑傜丄儘乕僞儕乕憱峴傪懕偗傞丅
- 弌岥傪敪尒偟偨傜90亱夞揮偟丄儘乕僞儕乕傪弌傞丅
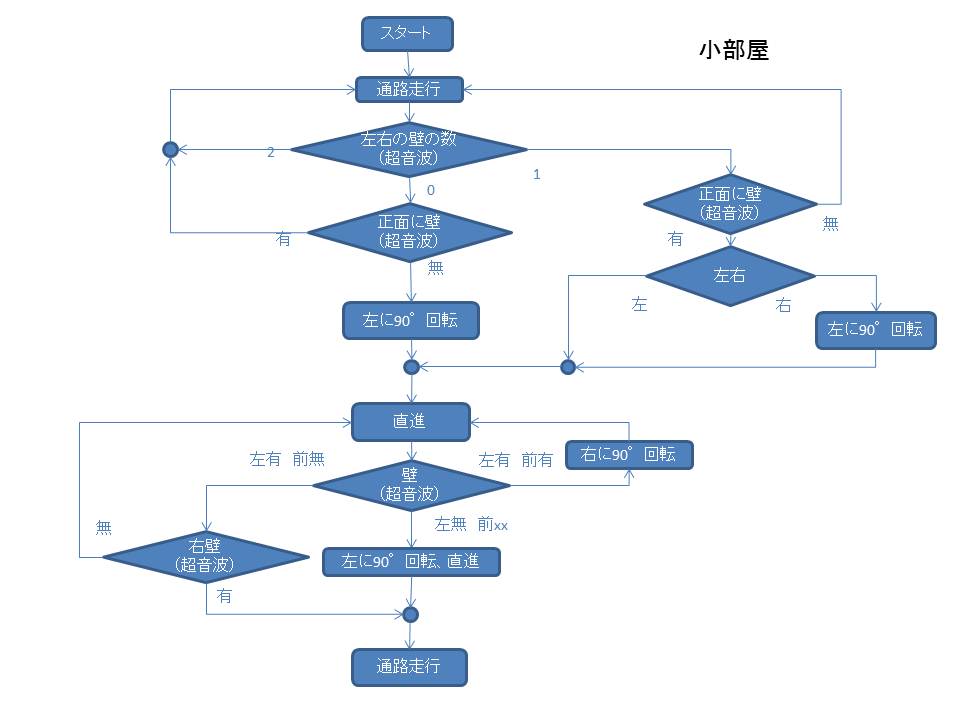
- 彫晹壆
- Direction Board偱幆暿屻丄彫晹壆偵怤擖偟偨偙偲傪挻壒攇僙儞僒偱敾抐
- 嵍偺暻揱偄偱丄弌岥傪扵偟側偑傜憱峴偡傞丅
- 尒偮偗偨傜弌傞 or 慜曽偺僞僢僠僙儞僒偵斀墳偑偁傟偽90亱夞揮偟偰嵞搙扵嶕偡傞丅
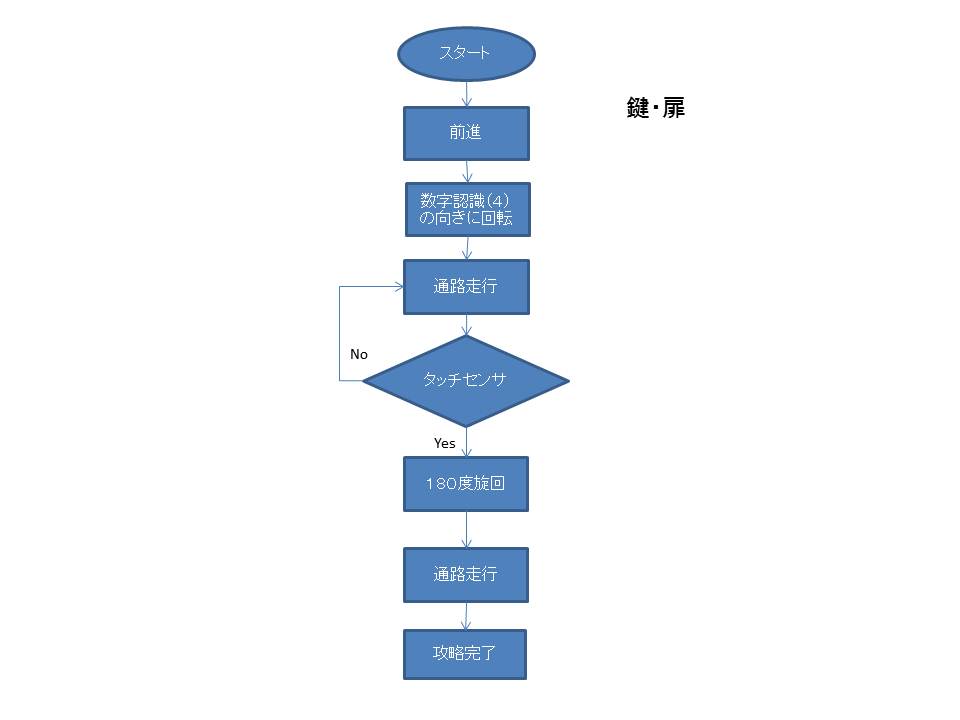
- 尞丒斷
- Direction Board偱幆暿屻丄尞偺埵抲傑偱堏摦偡傞丅
- 暻偵僞僢僋儖偟丄斷傪奐偗傞
- 斷傪捠傝丄師偺摦嶌偵堏峴偡傞丅