恾,1, 僾儘僌儔儉峔惉恾
| 柤徧 | MIRS1104 僜僼僩徻嵶愝寁彂 |
|---|---|
| 斣崋 | MIRS1104-SOFT-0001 |
嵟廔峏怴擔:2011.1.23
| 斉悢 | 嵟廔峏怴擔 | 嶌惉 | 彸擣 | 夵掶婰帠 |
|---|---|---|---|---|
| A01 | 2011.12.19 | 栰郪 | 彑枖寬(媿娵) | 弶斉 |
| A02 | 2011.12.20 | 栰郪 | 彑枖寬(媿娵) | 椺奜偺捛壛 |
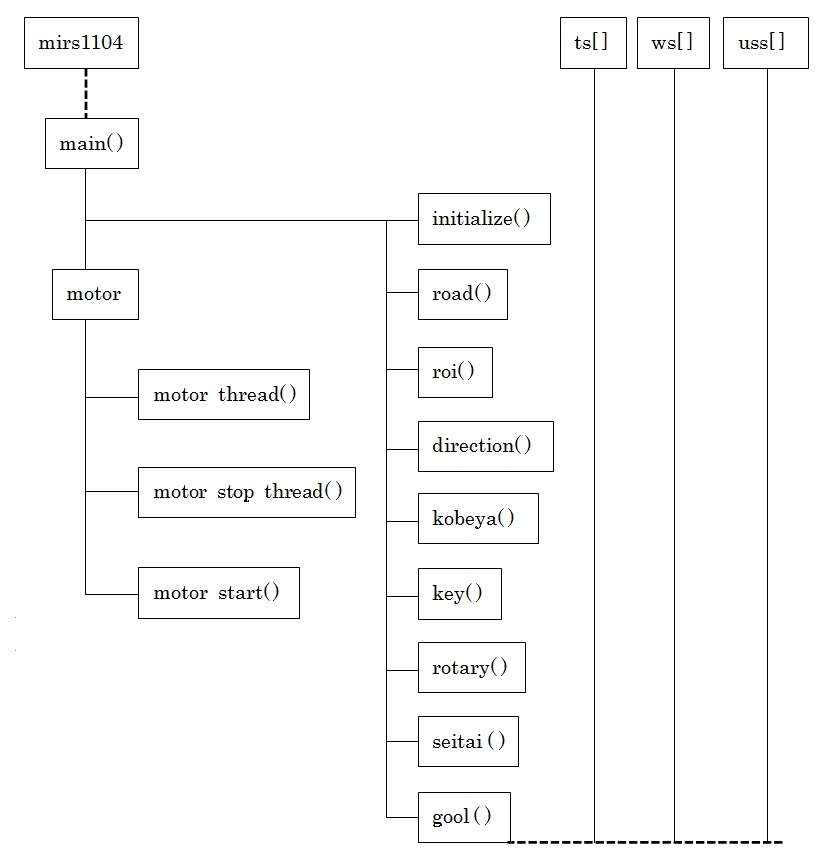
丂mirs1104偺僾儘僌儔儉峔惉恾傪壓恾偵帵偡丅
丂傑偨奺娭悢偛偲偵僜乕僗僼傽僀儖傪暘妱偟偰嶌惉偡傞丅
恾,1, 僾儘僌儔儉峔惉恾
丂mirs1104偺忬懺慗堏恾傪壓恾偵帵偡丅
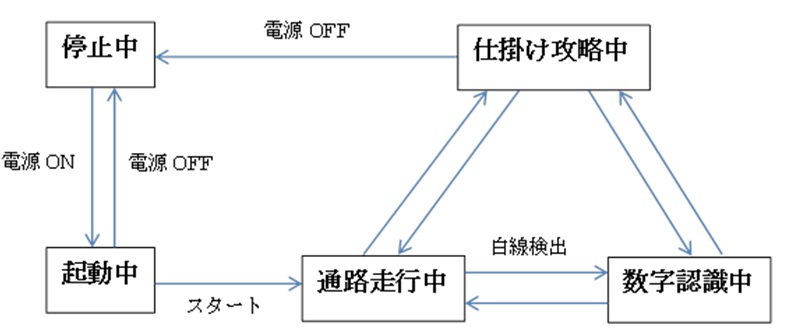
恾,2, 忬懺慗堏恾1
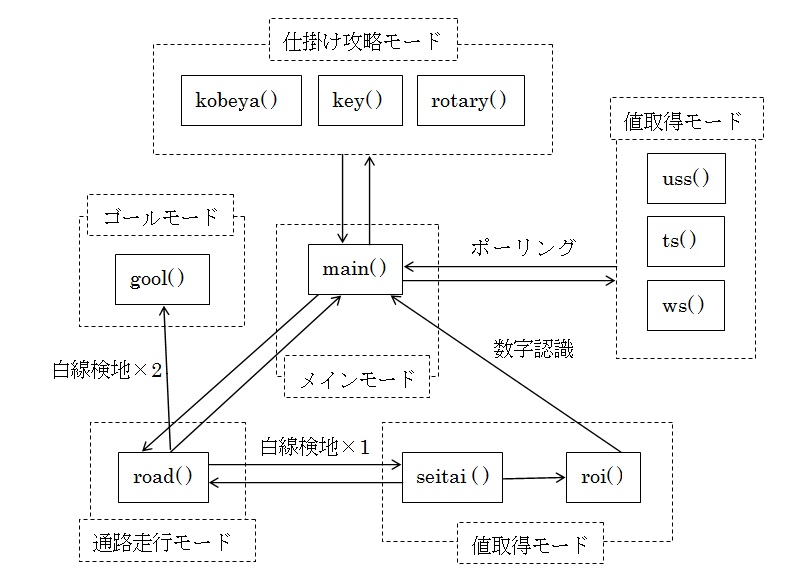
恾,3, 忬懺慗堏恾2