| 名称 | プログラム詳細設計書 |
|---|---|
| 番号 | MIRS1103-SOFT-0001 |
最終更新日:2012.2.17
| 版数 | 更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2011.12.12 | 吉田拓人 | 北川琢真 | 初版 |
| A02 | 2011.12.16 | 吉田拓人 | 北川琢真 | フローチャートの追加 |
| B01 | 2011.12.19 | 吉田拓人 | 北川琢真 | ファイル構成の説明を追加 |
| B02 | 2012.2.17 | 北川琢真 | 北川琢真 | 名称変更 |
変更点
・小部屋攻略方法
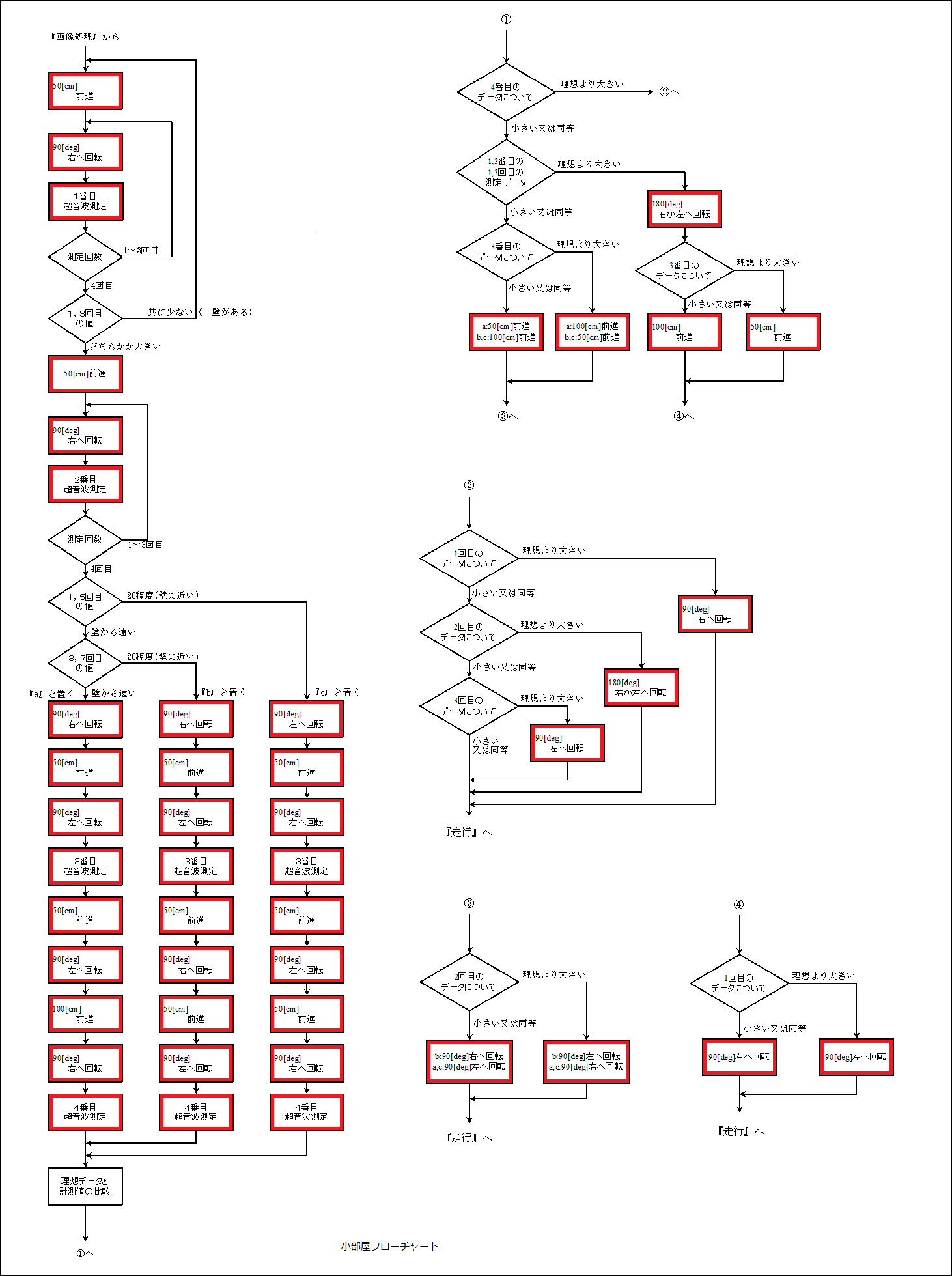
前期小部屋攻略方法(フローチャート)
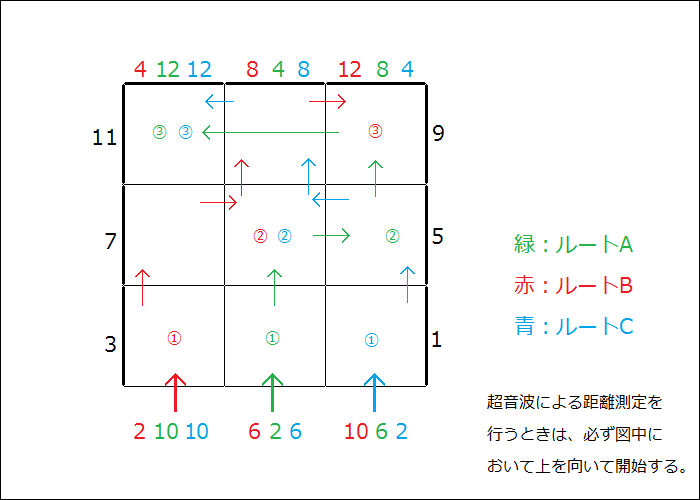
前期小部屋攻略方法(画像説明)
変更理由
1.スパゲッティプログラムとなりやすいと考えたため
2.小部屋攻略に時間がかかってしまうため
変更後
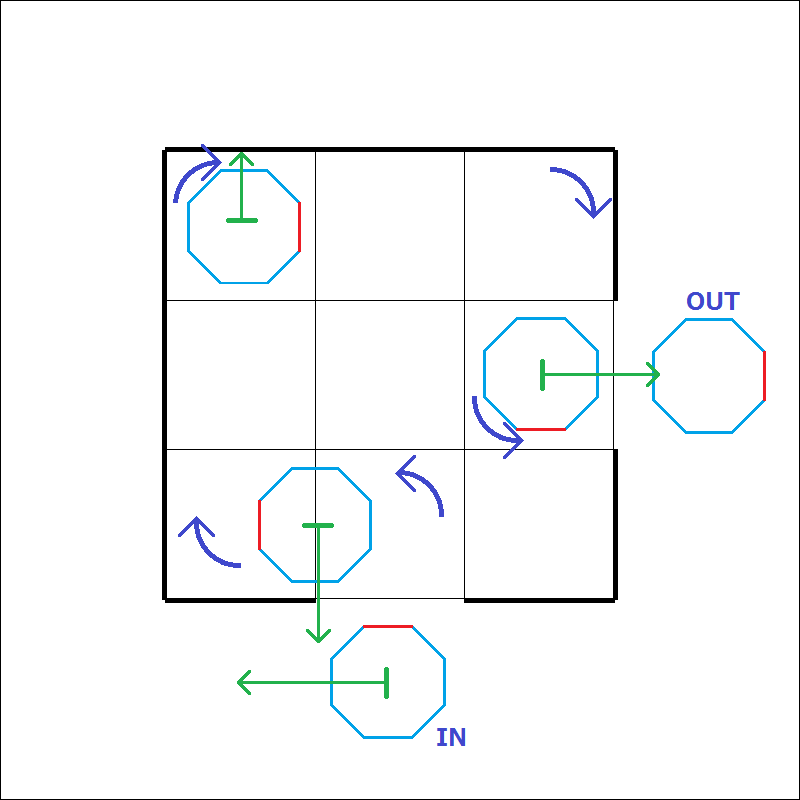
おもに、ロータリーエンコーダと超音波センサを用いた攻略法を行う
簡単な迷路での攻略法「右手(または左手)の法則」と言われている方法を用いて攻略に臨む
小部屋攻略方法(画像説明)
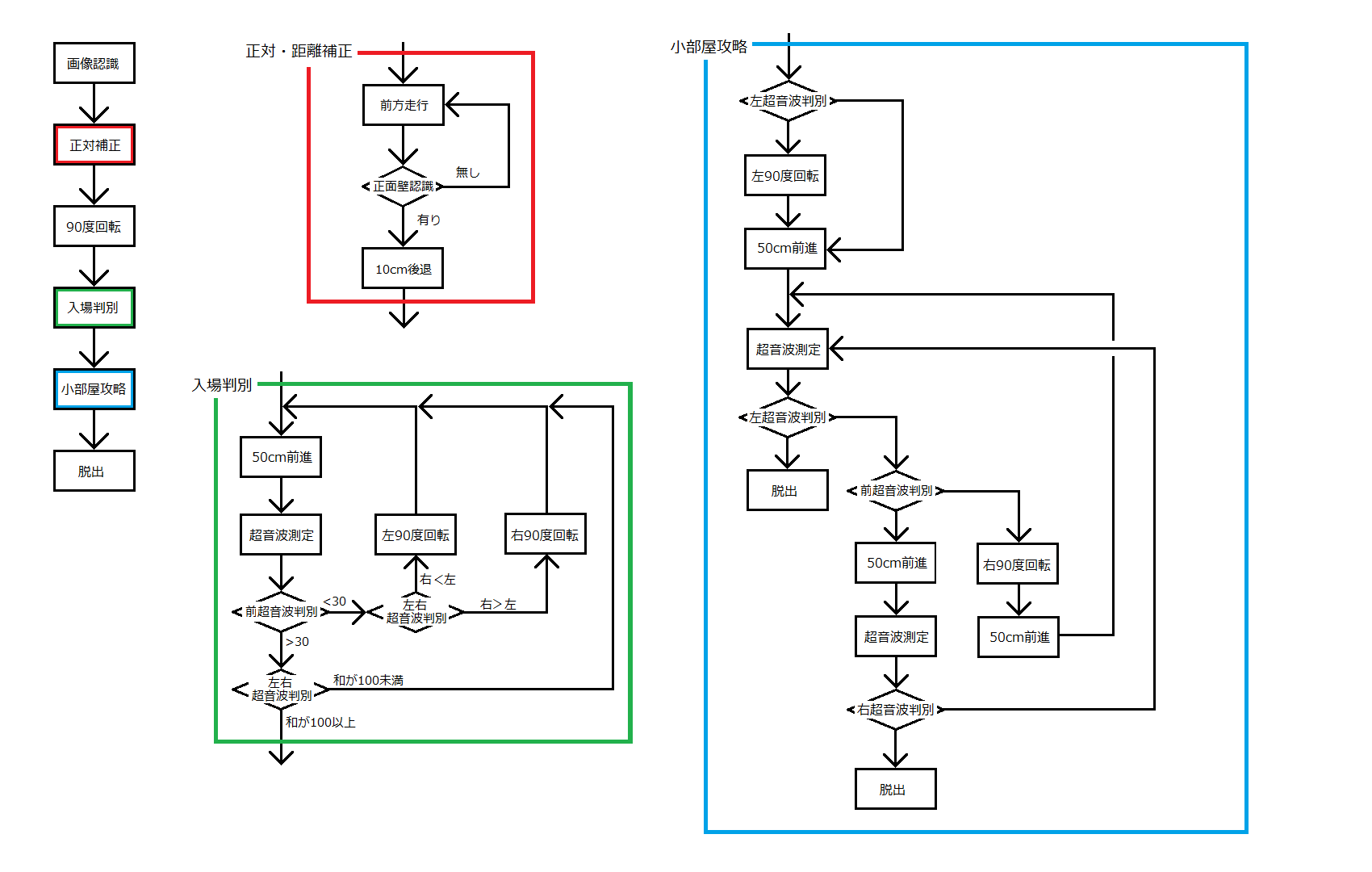
小部屋攻略方法(フローチャート)
ただし、部屋(障害)に入ったかの判断は前期プログラムと同じ方法で行う
※左右超音波センサの値の和が100〜120付近、かつ前方超音波センサの値が100付近を指すとき
この判断は方向転換をした際には適用しない
ファイル構成 以下に示すものは拡張子を除いたファイル名と役割である(すべて同じフォルダ内に置く)
追加機能
・ロータリーエンコーダの値を読み取り、現在の自分のいる場所を判断するプログラムの追加
直進走行時の補正
→現在位置と目標地点の座標との差を取り、その方向への変更を行う
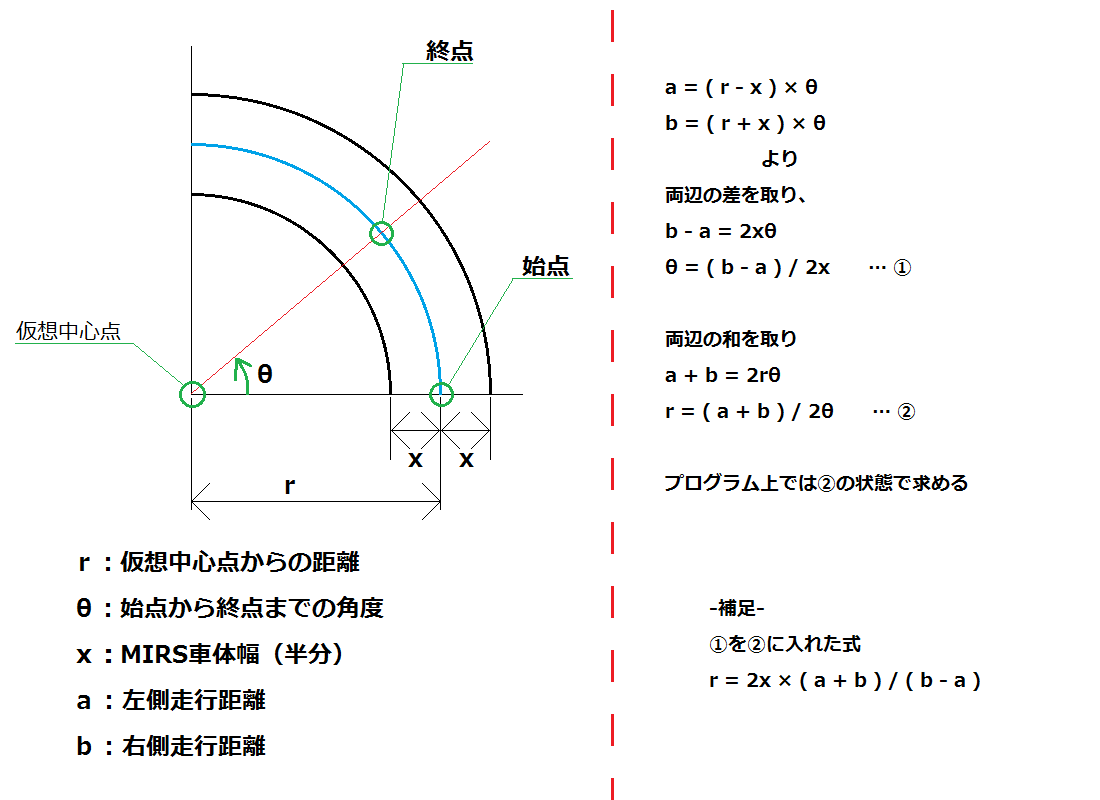
算出法(画像説明)
一例
一例(値)
・状態表示のLEDへの信号送信プログラムの実装
通常走行時、画像認識時などのプログラム実行時にどのような状態にあるのかの視覚化のために実装予定
3班北川・吉田、4班野澤、5班木村とともにプログラム作成しているが、完成しなければ使用しない予定
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}