- コース攻略方針
- モーター上下移動機構
- ハードウェア改造・追加
- ソフトウェア改造・追加
- システム外観図
- スケジュール
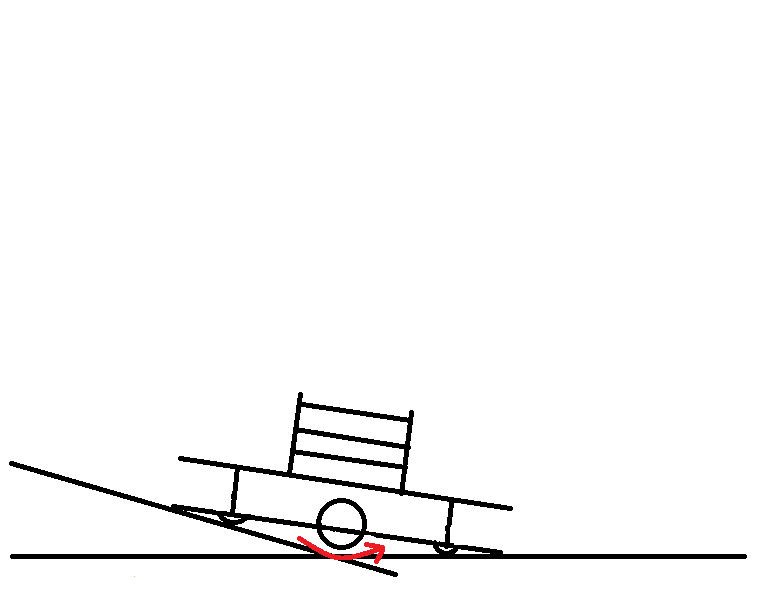
ゴールにたどり着くことを目標とする。しかし、既存のMIRSではスロープをクリアすることはできない。よってその対策としてモーター上下移動機構と水平検知センサの導入を提案する。
▼内容
-
現在のMIRSはシャーシが二段構造になっている。今回、私たちは下段をさらに二つに分解し、三段構造へと改造する。これを上から上段、中段、下段とし、下段にはモーターとエンコーダを配置する。また中段と下段の連結は固定せず、上下移動ができる構造にする。また、この間にバネをとりつけタイヤの床との摩擦力を強くする。
機構導入前はスロープを上る際、タイヤが空転してしまう。よって機構導入により、スロープを上る際に生じるタイヤと床との間の空間を無くすことが移動機構の目的である。
サスペンションに用いるバネは、あまり固すぎずまた、柔らかすぎないものを用いる。ダンパーを用いる可能性もある。
-
スロープを上るには二つの方法が考えられた。一つ目はモーターを動かす方法、二つ目はキャスターを動かす方法である。私たちは一つ目を選択したが、二つ目を選択しなかった理由としてはバネの硬さをきめることが難しいことにある。バネが柔らかい場合、MIRS移動時に水平を保つことができなくなる。バネが固すぎる場合、スロープを上る際にキャスターが縮むことができない。よって一つ目を導入することに決めた。
▼改造
-
・モーター上下移動機構(スロープ対策)
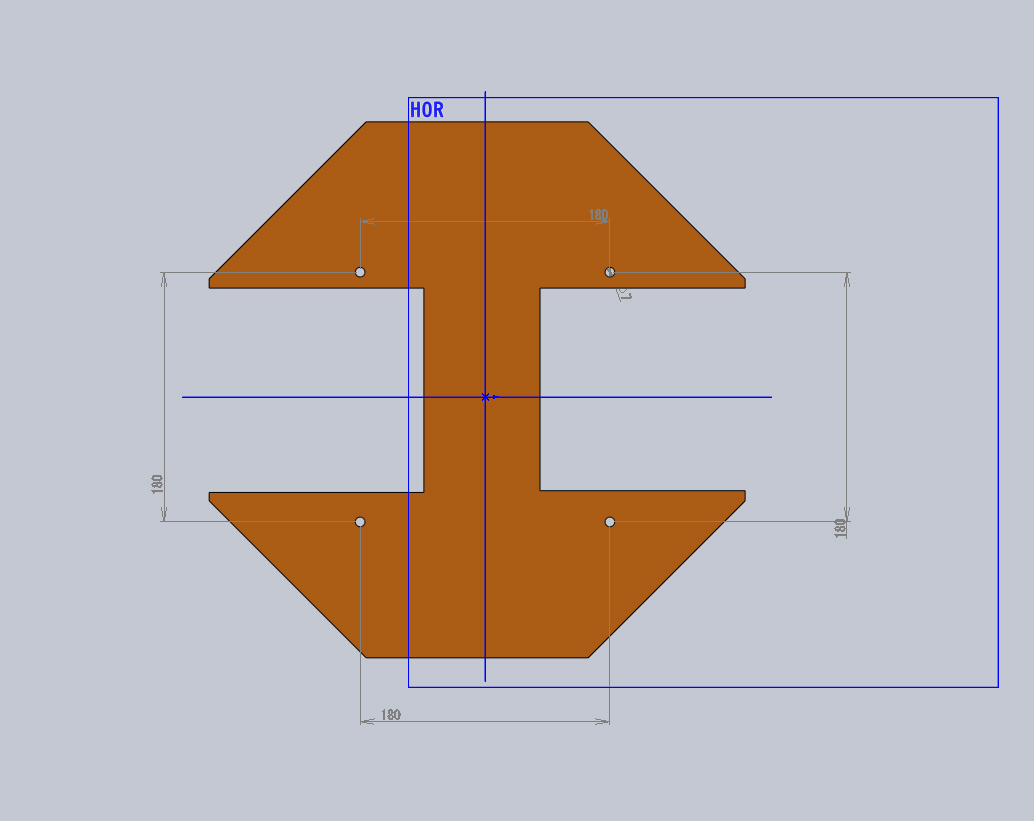
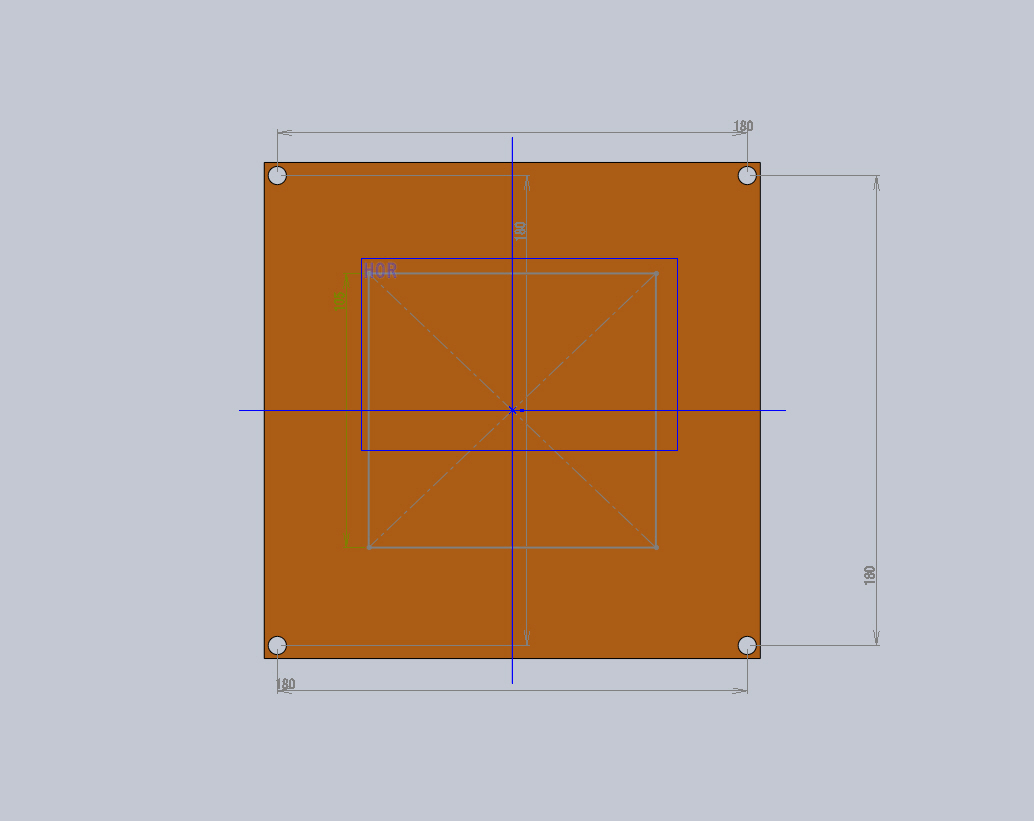
・シャーシ(上下移動機構)
・基盤の配置変更(基盤増設のため)
-
・フルカラーLED(状況表示)
PICによるダイナミック制御でフルカラーLEDの制御をおこなう。また、それに伴いフルカラーLED(状況表示)専用のボードを作成する。
・電子ブザー(状況表示)
LEDの状況表示基盤に実装できれば行うが、余裕がなければ行わない。
・ドータボードの改造 状況表示基盤の作成に伴い、ドータボード下段のポートを改造しなければならない。そこで可能であれば2枚のドータボードを 1枚に統合し、機能の高密度化を図る。 ・超音波センサ(子機)
戦略的に必要なので追加する。
▼追加
-
・スロープ対策
・状況表示
・各、新障害物対策
動画
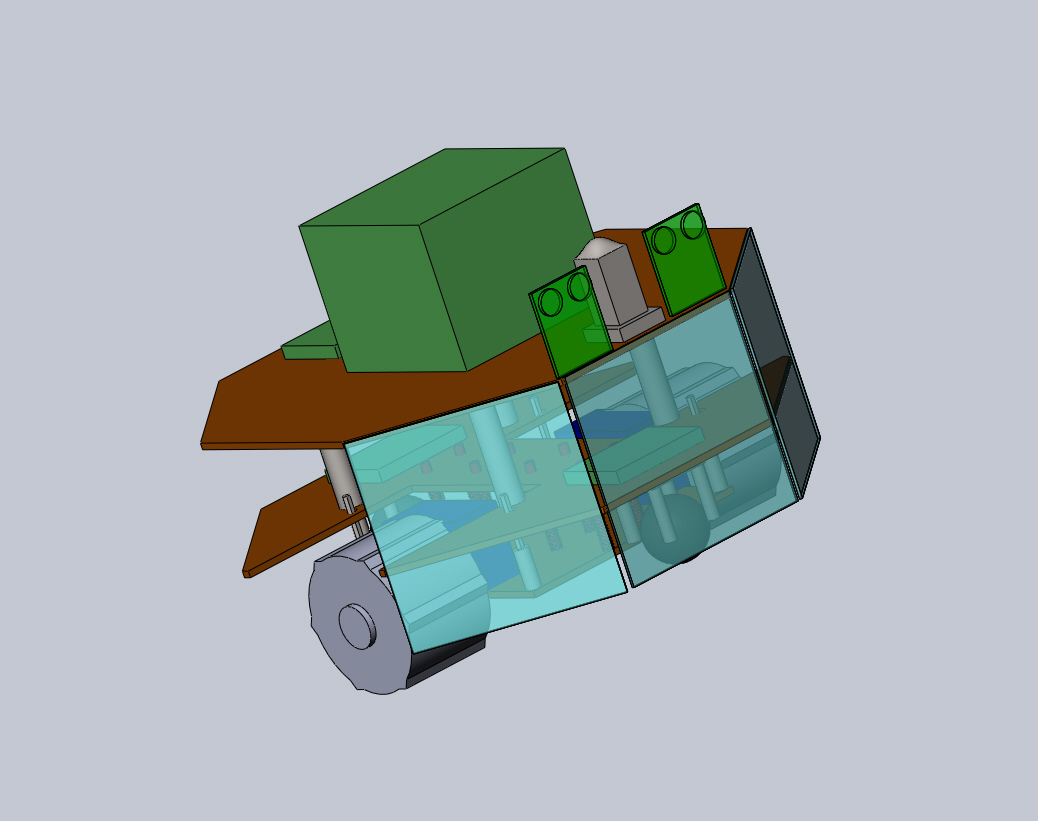
全体外観図
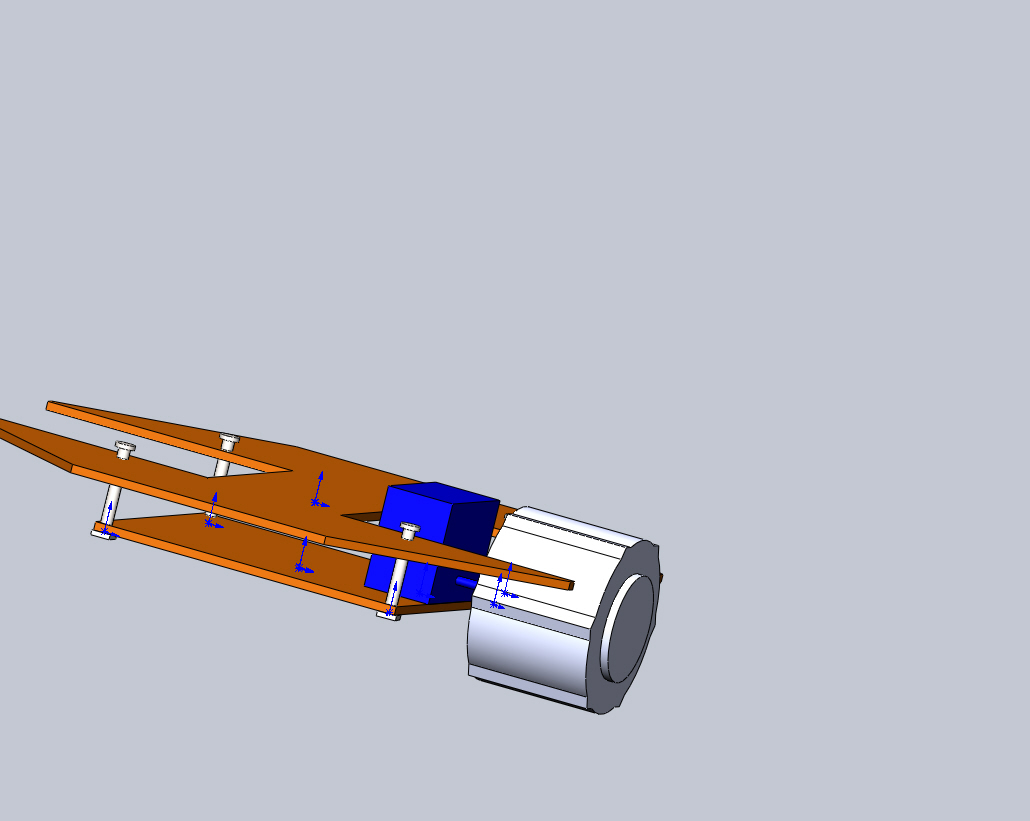
サスペンション外観図
・ハード完成予定 今年中
上下移動機構(坂本、松蔭、手島)
状況表示基盤(北川、志村、松蔭)
・ソフト完成予定 来年一月前半
吉田拓人、吉田拓馬また、ハードの作成が終わり次第順次ソフト作成を行う。
沼津工業高等専門学校 電子制御工学科