2. 設計コンセプト
3. システム構成
3.1. ハードウェア
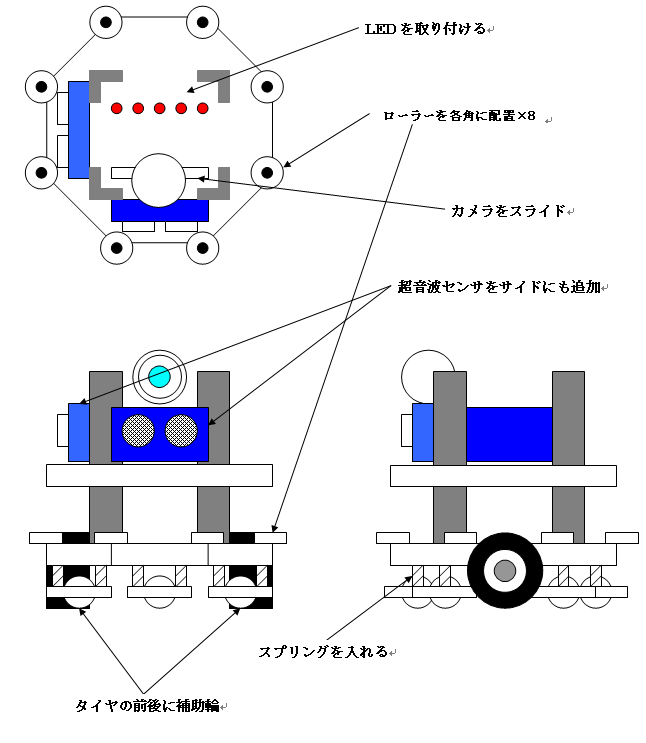
・ベアリングローラーの追加ローラーをボディに複数取り付けることにより、コーナーリング時、直進時に壁にぶつかった際に、走行をスムースにする。
・カメラのスライド
カメラによる画像認識は、数字を1つしか認識することが出来ない。そのため、カメラをスライドさせることにより、2つの数字
を認識するためにカメラをスライドさせ、これを可能にする。
別案として、カメラを側面につけることで、MIRSが前後進するだけで2つの数字を認識できるようにする。
プログラムで画像分割をするならこの機能は全く必要ない。そのうえ作るのは難しいと思われるので没の可能性が高い。
・補助輪の追加
タイヤの前後に補助輪を追加することにより、安定化を図る。これはシーソーからの落下防止策でもある。
・補助輪にスプリングを追加
補助輪の軸にスプリングを追加することにより、ステップ、シーソーをクリアする際に、衝撃の吸収、タイヤの浮上阻止を図る。
LEDによる現在動作の確認
LEDの点灯を各動作により変えることで、現在の動作を識別する。これにより開発時にプログラムのデバッグに役立てる。
LEDボード他の詳細はエレキの別資料を参照のこと。
超音波センサの詳細
超音波センサを3つ用いる。超音波センサの位置は、超音波センサの検出範囲を考慮してMIRSの前面に2つ超音波センサを設置し、側面につける。もしくは、前に1、左右1つずつ超音波センサを設置する。
場合によっては、側面に取り付ける超音波センサを、MIRSの端に内向きに取り付けることで、実際のMIRSと壁との距離が20cm以下でも距離の変化がわかるようにする。
3.2. ソフトウェア構成
Direction board
カメラを使い数字認識、画像を分割し、数字を判別する。その後ゴールとロータリーならゴール、のようにあらかじめ決めておいた優先度から進む方向を決める。
数字の認識方法は、パターン認識にした方が良いかもしれない。
何秒か数字認識を行ってもエラーが起こり認識できない場合は、諦めて左か右どちらかに進む。このときの進む方向は常に同じ方向にしておく。
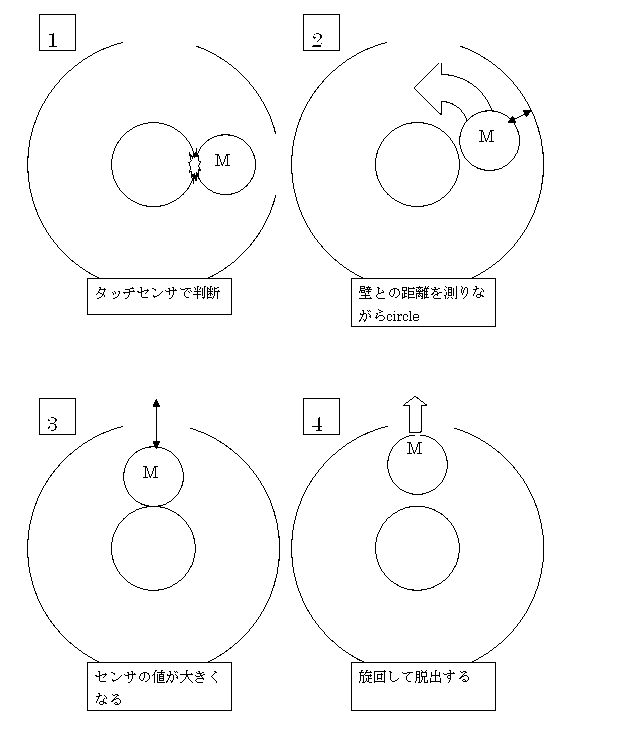
小部屋(コスモ)
小部屋に入ったことは超音波センサの値から判別する。壁づたいに移動し、側面につけた超音波センサの値が大きくなったとき(恐らく20cmを超えたとき)に、出口があるとして、脱出を図る。
ロータリー
小部屋と同じような方法でクリアする。ロータリーに入ったことはタッチセンサで判断する。