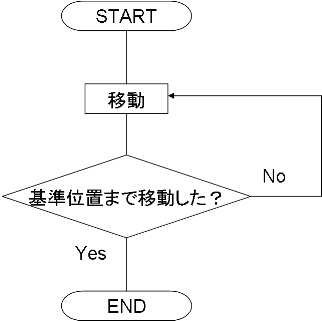
fig.1 フローチャート(基準位置移動モード1(move_1))
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2008.9.5 | 浦田・里見 | 浦田 | 初版 | ||
| A02 | 2008.9.18 | 浦田 | 浦田 | リンク切れの修正 | ||
| A03 | 2008.9.19 | 里見 | 浦田 | フローチャートの追加 | ||
| A04 | 2008.10.6 | 里見 | 浦田 | 動作モード遷移表をフローチャートに変更 | ||
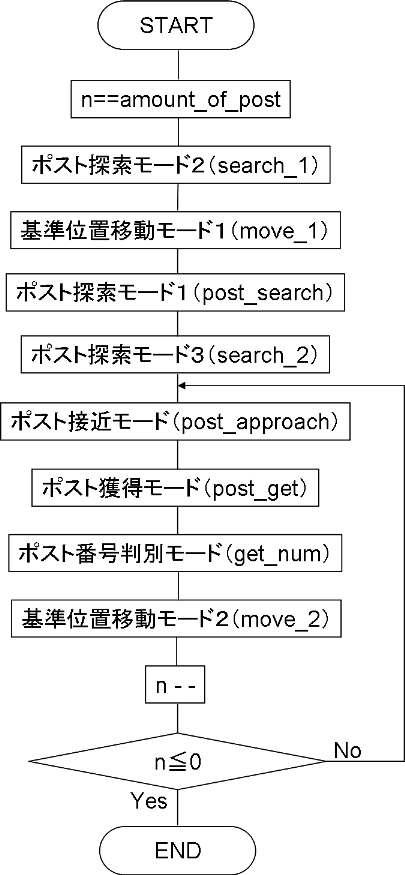
本ドキュメントではMIRS0804基本設計書(MIRS0804-DSGN-0002)に規定されたシステムを実現するために必要な動作モード、関数について必要な事項を述べる。
(1)基準位置移動モード1(move_1)
競技開始位置から、あらかじめ決定しておいた基準位置に移動する。
(2)基準位置移動モード2(move_2)
現在位置から基準位置まで移動し、補正をかけ、基準方向を向く。

(3)ポスト探索モード1(post_search)
360度自転を行い、超音波センサで周囲のポストを探索する。この際発見できたポストの数をamount_of_postという変数に格納する。競技場内の全ポストを発見するか、2回転しても新たなポストを発見できなかった場合にはモードを終了し、次の動作に移行する。
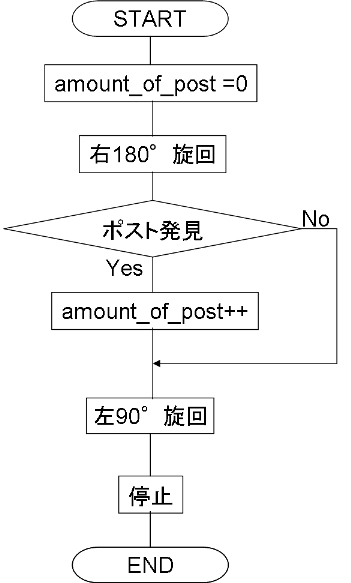
(4)ポスト探索モード2(search_1)
競技開始後、スタート位置で前方180度を本体側面の超音波センサで探索する。
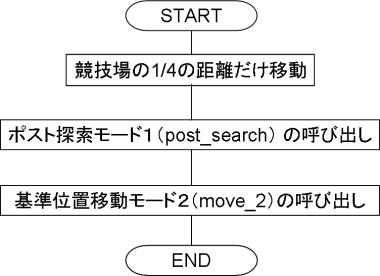
(5)ポスト探索モード3(search_2)
基準位置から競技場の1/4の距離だけ直進し、ポスト探索モード1(post_search)を呼出する。
その後、基準位置移動モード2(move_2)を呼出する。
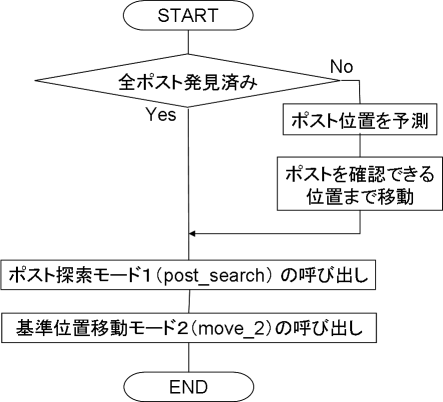
(6)ポスト位置予測モード(predict)
すべてのポストが確認できなかった場合に、競技規定とポスト同士の位置関係から最もポストが隠れている可能性が高い場所を予測して移動する。
その後ポスト探索モード1(post_search)、基準位置移動モード2(move_2)の順で呼出する。
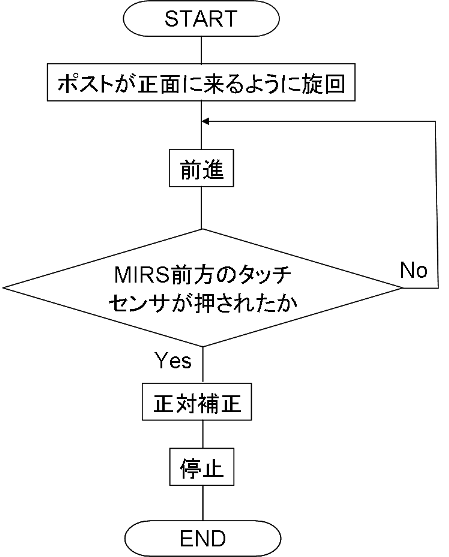
(7)ポスト接近モード(post_approach)
発見したポストを獲得するために接近する。
(8)ポスト獲得モード(post_get)
アームを展開してポストを獲得。ポスト獲得後にアームを収納する。
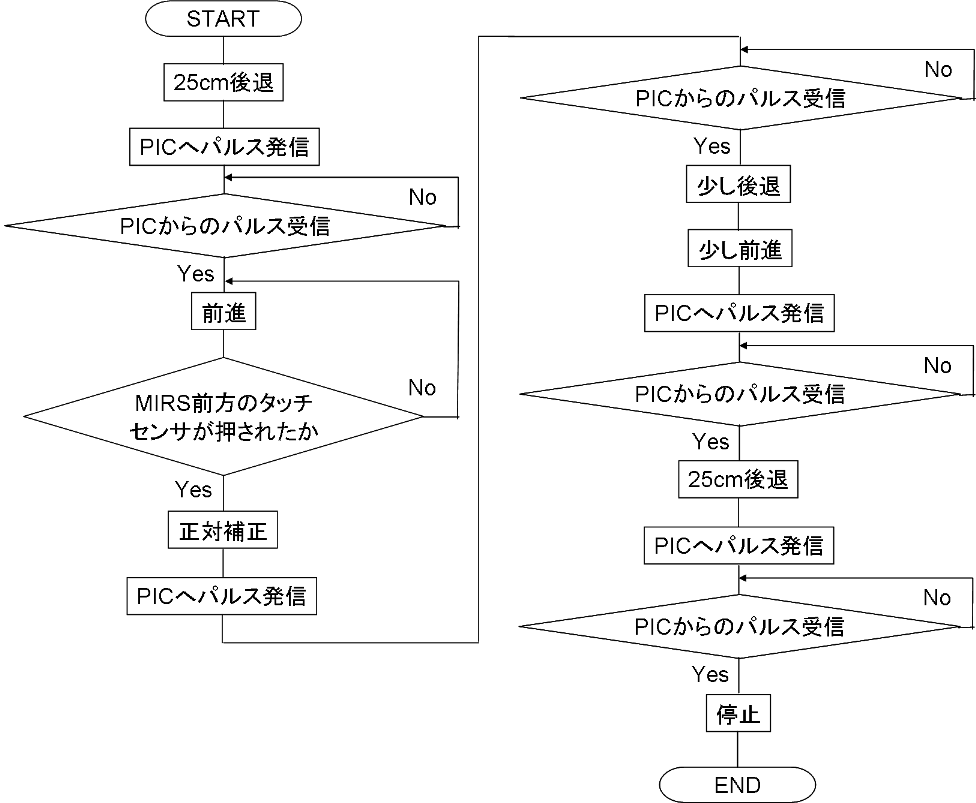
※fig.8中のパルスに関しては、MIRS0804エレクトロニクス詳細設計書(MIRS0804-ELEC-0001)を参照。
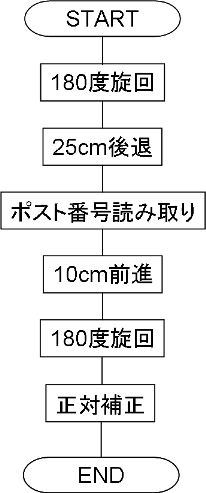
(9)ポスト番号判別モード(get_num)
MIRS本体背面に取り付けられた白線センサをポストに接触させ、番号を確認して記録する。