 fig.1 構成図
fig.1 構成図
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2008.9.12 | 早苗 | 浦田 | 初版 | ||
| A02 | 2008.9.14 | 早苗 | 浦田 | モーター制御用ボードの回路図を追加 | ||
| A03 | 2008.9.18 | 早苗 | 浦田 | モーター制御用ボードの回路図、FPGAボードのピン割り当て変更 | ||
| A04 | 2008.9.19 | 早苗 | 浦田 | タイミングチャートの追加 | ||
| A05 | 2008.10.6 | 早苗 | 浦田 | モーター制御用ボードの回路図、一部説明文の修正 | ||
| A06 | 2008.10.24 | 早苗 | 浦田 | FPGAピン割り当て、購入部品変更 | ||
(1) この文章はMIRS0804のエレクトロニクスに関する詳細設計を記述したものである。
2.1 標準機から取り除いたもの
2.2 標準機から追加したもの
2.3 購入部品
3.1 標準機からの変更点
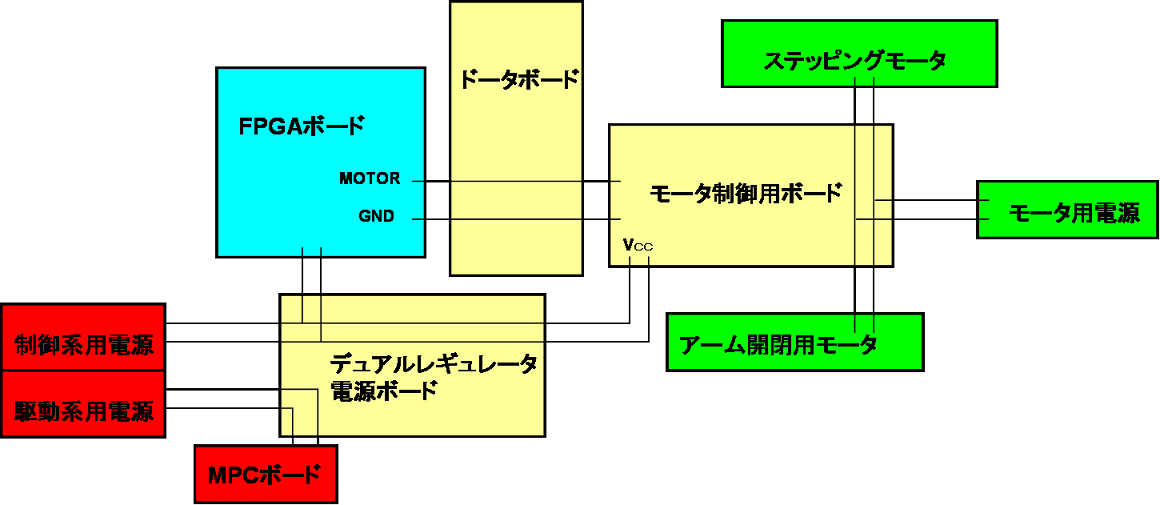
標準機に変更を加えた部分の構成図を以下に示す。
fig.1 構成図
3.2 ドータボード変更点
特になし
3.3 FPGAピン割り当て
標準機から変更した部分を色を変えて記述する。
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
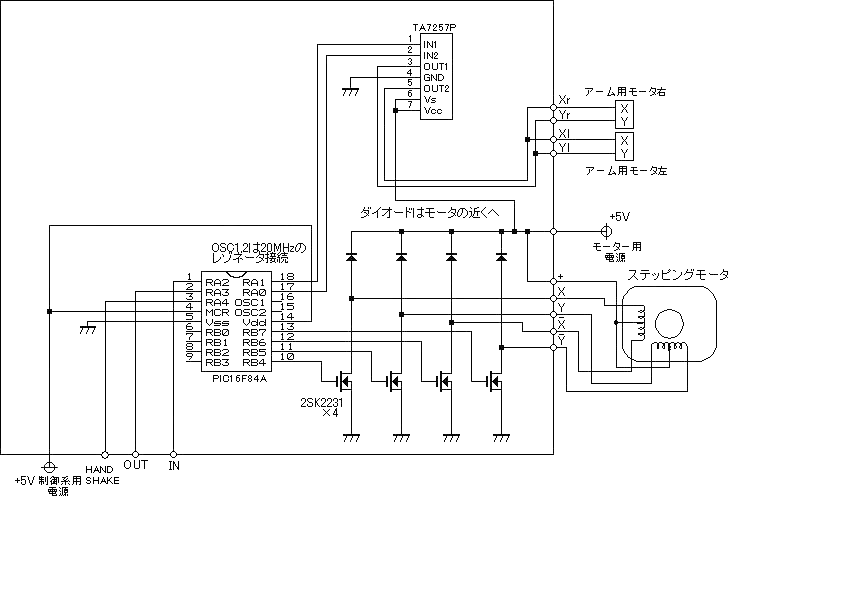
3.4 モーター制御用ボード回路図
モーター制御用ボードの回路図を以下に示す。
3.5 タイミングチャート
FPGAからのモーター制御パルスとモーターの動作についてのタイミングチャートを以下に示す
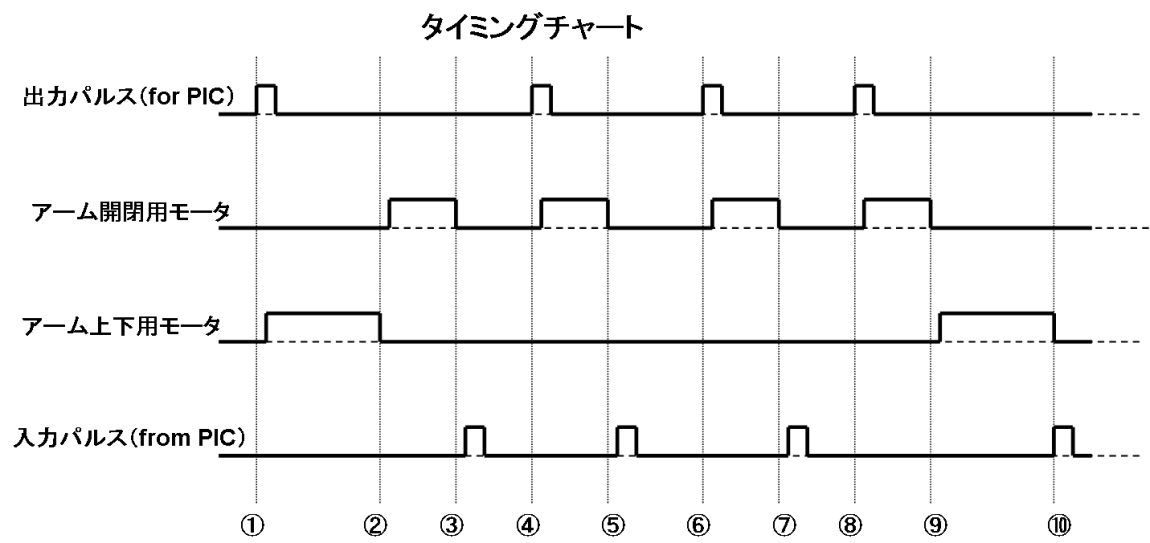
タイミングチャートの説明
① FPGAからのパルスをPICに送信する。 ①-② アームを下げる。 ②-③ アームを開く。 ③ アームが開いたことをパルスとしてPICから受信する。 ③-④ MIRSを前進させる。 ④ 前進し終わったことをパルスとしてPICに送信する。 ④-⑤ アームを閉じる。 ⑤ アームが閉じたことをパルスとしてPICから受信する。 ⑤-⑥ MIRSを前進、後退をさせポストを獲得する。 ⑥ 獲得動作が終わったことをパルスとしてPICに送信する。 ⑥-⑦ アームを開く。 ⑦ アームが開いたことをパルスとしてPICから受信する。 ⑦-⑧ MIRSを後退させる。 ⑧ MIRSが後退し終わったことをパルスとしてPICに送信する。 ⑧-⑨ アームを閉じる。 ⑨-⑩ アームを上げる。 ⑩ アームを上げ終わったことをパルスとしてPICから受信する。