|
沼津高専 電子制御工学科 |
||||||
|
||||||
|
改訂記録 |
||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||
|
A01 |
2007/07/13 |
細川 |
佐野 |
初版 |
||
|
A02 |
2007/07/24 |
細川 |
佐野 |
実現方法(位置補正用白線センサ)説明追加 |
||
目次
1.目的
本文書は開発提案書とプレゼンテーション時の質疑応答及び技術調査書をもとに、MIRS0705の基本開発についてまとめたものである。
2. システム概要
1.システム要求
・MIRS0705は移動時に生じる誤差を限りなく少なくし、また、生じる誤差を補正しながらポスト獲得を行うことを目標とする。
・要求を満たすために以下の機構を追加する。
・補正用白線センサ
・ポストナンバー読み取り機構
・ポスト獲得用有弾性アーム
詳しくは以下のハードウェアの項に記す
・ポスト獲得方法は以下のように変更する。
・動作は基本的に白線に沿って行い、誤差が出そうな動作をするたびに誤差修正を行う。この際、補正用白線センサを用いる。
・ポスト探索はフィードの4つの角で行い、すべてのポストを発見できていなかった場合は追加して中心でも行う。
・ポストナンバーは白線センサを用いて確認し、無駄な動作をなくすことで誤差を少なくする。
・ポスト獲得は、有弾性アームを用いることでポストを周回するだけで獲得できるようにする。これにより無駄な動きを削除し、誤差を減らす。
詳しい動作はMIRS07075(システム開発提案書)に示す。
2.ハードウェア
・補正用白線センサ
白線上で位置を完璧に補正するために、白線センサを底部に5個搭載する。
・ポストナンバー読み取り機構
ポストナンバー読み取りように白線センサを正面に4個搭載する。また、ポストに触れて読み込みを行うため、タッチセンサを1個搭載する。白線センサはPICを使って3bit出力にする。基本はMIRS0604のものを流用する。
・ポスト獲得用有弾性アーム
ポストを周回するだけで獲得できるよう、MIRS左部に取り付ける。
競技開始前は規定を超えないよう格納できるようにし、スタートと同時に展開する。
・各種センサ
<白線センサ>
白線センサは上記のように9個搭載する。ポストナンバー読み取り用は3bit出力、位置補正用はそのまま5 bit出力とする。このままではWSのポート数が足りないが、IRSのポートが空いているのでそこを用いる。
底部白線センサは位置補正の他に、MIRSが白線外に出ないよう制御する。
<超音波センサ>
超音波センサは前に2個左に2個搭載する。左超音波センサはMIRSからポストまでの正確な距離を測定する。
前方についている2つの超音波センサでポストにMIRSがポストに垂直になるようにする。
左側についている超音波センサで周回しているポストとの距離を保つ。
<タッチセンサ>
ポストナンバー読み取り機構に1個、左右バンパーに2個搭載する。
正面のタッチセンサがONで白線センサによりポストナンバーを取得する。
左右タッチセンサはポスト衝突時の緊急回避用として用いる。
<赤外線センサ>
ポストナンバーの取得は白線センサを用いて行うため、赤外線センサは搭載しない。
・その他(未決定事項)
移動を安定させるためにデュアルレギュレータを搭載する予定である。
また、現在のMIRSの状況がわかるような表示をするLEDを搭載する予定である。(余力による)
3.ソフトウェア
・白線に沿ったポスト探索を行うよう改良
・白線を用いた位置補正プログラムの作成
・ポストナンバー読み取りプログラムの修正
4.概観
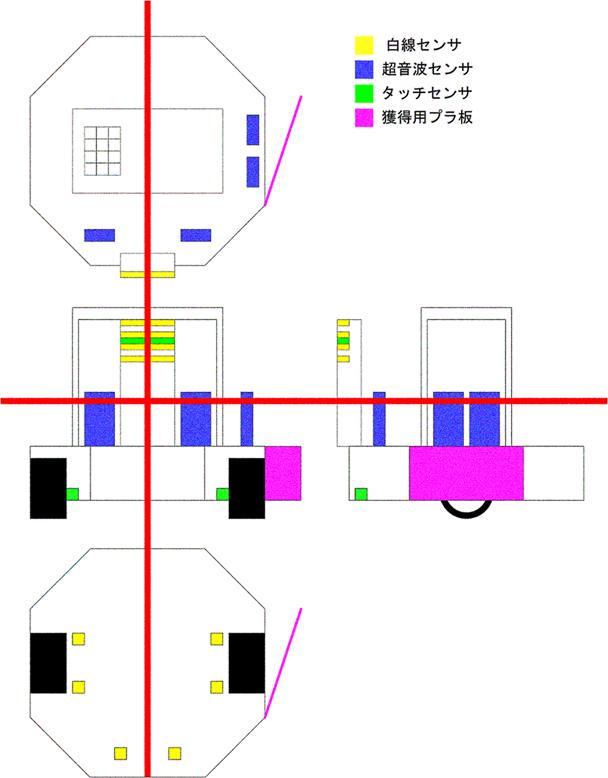
1.ハードウェア
・補正用白線センサ
シャーシ下部に白線センサを上図のように取り付ける。
これらの白線センサを用いて白線のどの位置にいるかを調べる。
センサ1,2を用いて白線の中心を走行しているかを確認する
センサ2,3,4,5を用いて白線に対して垂直に位置しているかを調べる。
・白線に垂直で、白線上
・白線より前
・白線より後ろ
センサ1,2,3,4を用いて白線の90度を測定し、フィールドの角にいることを調べる。
・白線の角上で正面前向き
・白線の角より右
・白線の角より左
・白線の角より上
・白線の角より下
以上のように白線センサ5つで正確な位置の補正を検出し、位置補正を行う。
・ポストナンバー読取機構
上記の通り、MIRS0604のものを流用する。
センサは、白線センサ4個とタッチ船さ1個を用いる。
読み取った値をPICを用いて、ポストナンバーを2進数にしたもので3bit出力する。
・有弾性アーム
MIRS0705では、MIRSがポスト獲得動作を行うことによる誤差をなくすため、周回するだけでポストを獲得できる独自のアームを使用することとする。
その製造法を以下に示す。
また、アームの材質は弾性のあるシリコンゴムを用いるため以後は有弾性アームと呼ぶ。
① 以下の図1はMIRS標準機のシャーシ上段である。
図中の○部分に図2の金具を取り付ける。
図.1
シャーシ上段
図.2
有弾性アーム取り付け金具
②
金具にネジでシリコンゴムを取り付ける。
シリコンゴムの寸法は、長さ220mm、幅14mmとする。
(市販のものを切って使用するため、厚さは購入の際に適切なものを選ぶこととする。)
図.3
有弾性アーム完成予想図
なお、上図のようにアームを取り付けるとMIRSのサイズが競技規定内に収まらないため、スタート時にはアームの先端に糸をつけ、それを下段シャーシに開いている穴から通し反対側のタイヤに踏ませることによってMIRS本体に巻きつけるような形で収納しておく。
これにより、競技開始時には規定内のサイズに収めることができ、MIRSが走り出したと同時にアームの弾性により自らが展開されるような形となる。
図4はスタート時のMIRS本体の簡略図である。
図.4 スタート時のMIRS本体間略図
2.ソフトウェア
・ポスト探索プログラム
動作に合わせたプログラムを作成する。
ポスト位置は極座標で発見し、それをxy直交座標に変換して記憶させる。これは、MIRS0705の動作は、ポスト探索を角で回転して行い、ポストへの接近は白線からxy軸に平行に移動して行うので、この方が都合がよいからである。
・位置補正プログラム
MIRSに対する白線の位置と、MIRS底部に取り付ける白線センサの値を比べて動作を決定する。
位置補正時にありうるすべての白線の位置を想定し、プログラムを組む必要がある。
ここが、MIRS0705のプログラムの肝なので、時間をかけて作成する。
・ポストナンバー取得プログラム
PICからの3bit信号を読み取り判別する。判別するタイミングは、ポストナンバー取得用白線センサ部に取り付けるタッチセンサの値が1になった時とする。
|
参考資料 |
MIRS標準機システム提案書(MIRSSTND-DSNG-0001)
MIRS0604(ポストナンバー識別機構)(MIRS0604-DSNG-0001)