|
沼津高専 電子制御工学科 |
||||||
|
||||||
|
改訂記録 |
||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||
|
A01 |
2007/06/26 |
細川 |
佐野 |
初版 |
||
|
A02 |
2007/06/26 |
細川 |
佐野 |
訂正・追加 |
||
目次
1.目的
本文書はMIRS0705の行動計画案についてまとめたものである。
2.システムの特徴
・移動、ポスト探索、獲得時に誤差が必ず出るものと仮定し、これを削除しながら動作することを目的とする。
・システムの特徴として、MIRS底部に白線センサを6個搭載する。それにより白線を用いて誤差修正を行いつつポスト探索、獲得を行う。動作の概要については下記参照。
・ポストナンバー取得にはより誤差の出にくい白線センサを用いる。
・ポスト獲得はプラ板を用いた帯(仮)を用いて、ポストを周回するだけで獲得できるようにする。
3.基本構成
<白線センサ>
白線センサはポストナンバー取得用に正面に4個、白線を用いた位置補正用に底部に6個搭載する。
ポストナンバー取得用はPICをかませて3bit、白線補正用は3bit出力にする予定(と言うより、それが限界)だが、ドータボードのポート数が足りないためそこをこれからの課題とする。
底部白線センサは位置補正の他に、MIRSが白線外に出ないよう制御する。
<超音波センサ>
超音波センサは前に2個左に2個搭載する。左超音波センサはMIRSからポストまでの正確な距離を測定する。
前方についている2つの超音波センサでポストにMIRSがポストに垂直になるようにする。
左側についている超音波センサで周回しているポストとの距離を保つ。
<タッチセンサ>
ポストナンバー読み取り機構に1個、左右バンパーに2個搭載する。
正面のタッチセンサがONで白線センサによりポストナンバーを取得する。
左右タッチセンサはポスト衝突時の緊急回避用として用いる。
<赤外線センサ>
ポストナンバーは上記のように白線センサを用いて行うので、赤外線センサを用いてナンバーを取得する必要が無いので搭載しない。
<ポスト獲得用プラ板(仮)>
ポストを周回するだけで獲得できるよう、MIRS左部に取り付ける。
競技開始前は規定を超えないよう格納できるようにし、スタートと同時に展開する。
<その他>
移動を安定させるためにデュアルレギュレータは搭載する予定である。
また、現在のMIRSの状況がわかるような表示をするLEDを搭載する予定である。
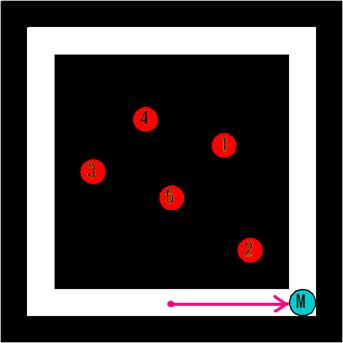
4.動作概要
・MIRS0705では白線を基準に動作を行うので、白線を太めに記載している。
・基本的に円運動をしたら白線の角を用いて位置の補正をかける。
競技1回目の動作を以下に示す。
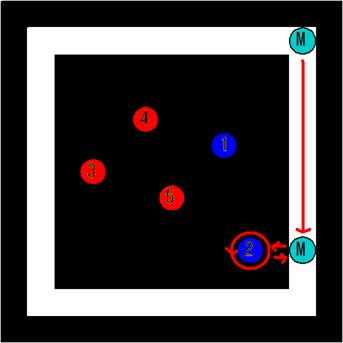
①
最初に白線に沿って右下角まで進む。
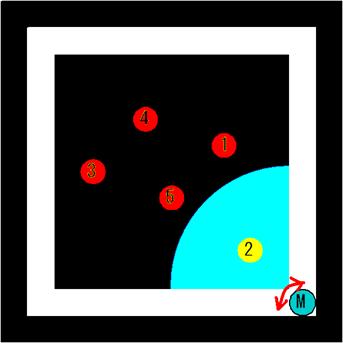
②
角を使って位置を補正し、ポストを90度回りながら探索する。
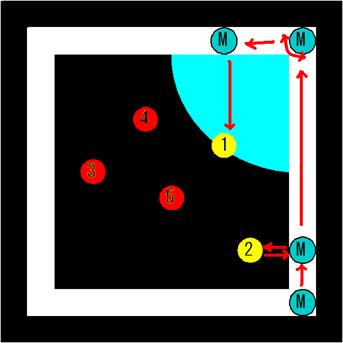
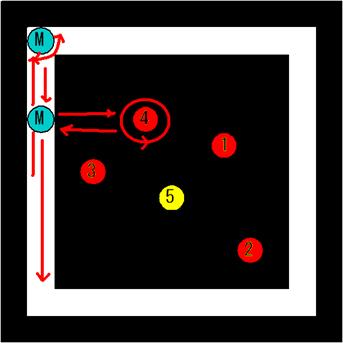
③
発見したポストに斜めではなく、xy方向の動きだけで接近しポストナンバーを取得。1番を確認するまで各角でこれを繰り返す。
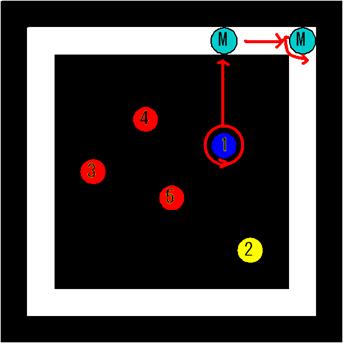
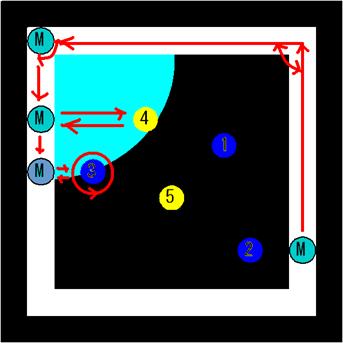
④
1番を確認したら獲得動作に移る。ポストを取るたびに角に戻り補正をかける。
⑤
以前に2番を確認していたら戻って獲得する。
以後、順番に獲得できるポストを獲得しつつ、まだ発見していないポストを発見・確認していく。
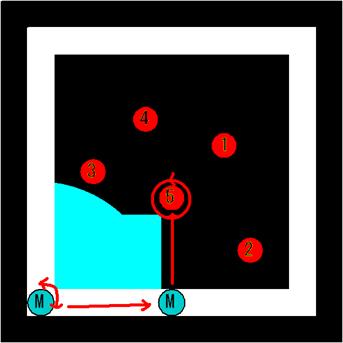
⑥
4つの角で探索しても全てのポストを確認できていない場合は、スタート位置からフィールドの真ん中を往復し残りのポストを発見・確認する。
この際、ポストにぶつかったらポストナンバーを確認する。その後まだ5個確認できていなかったら、このポストを回避して探索を進める。
①
全てのポストを確認したので順にとって行く。
※ 競技2回目は1回目に取った座標を使ってポストを順番どおりに取得していく。
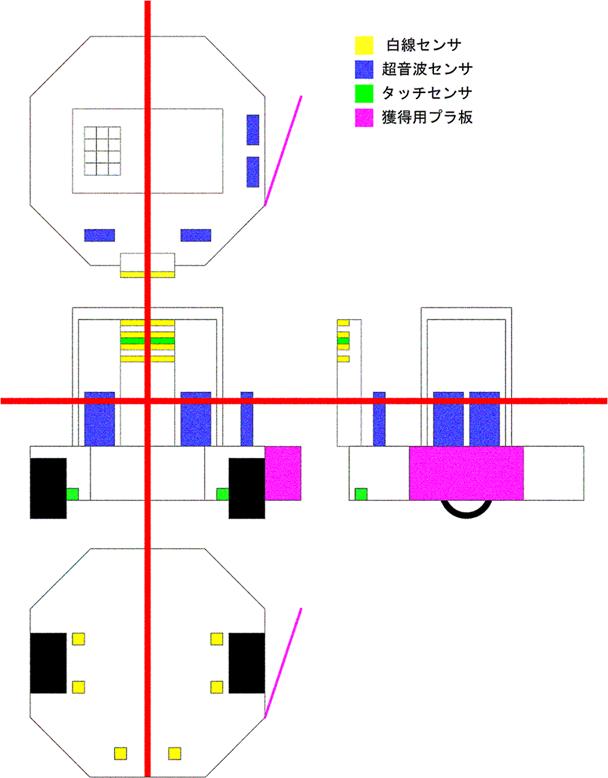
5.システム概観
MIRS0705に取り付ける各種センサ・パーツの位置を以下に示す。
6.システム問題点
・ポスト獲得に時間がかかる。
・白線センサ用のポートが足りない。
これらの改善をシステム開発と同時ないし、システム開発よりも優先して行っていく必要がある。
7.訂正箇所
・システムの特徴を一部訂正
・基本構成の赤外線センサの項を訂正
・動作概要の④の1つ目の図を訂正
・システム概観を大幅に変更(センサ取り付け位置の変化はなし)
|
参考資料 |
MIRS標準機システム提案書 (MIRSSTND-DSNG-0001)
ポスト識別機構 (MIRS0604-DSNG-0001)