4.1 競技一回目
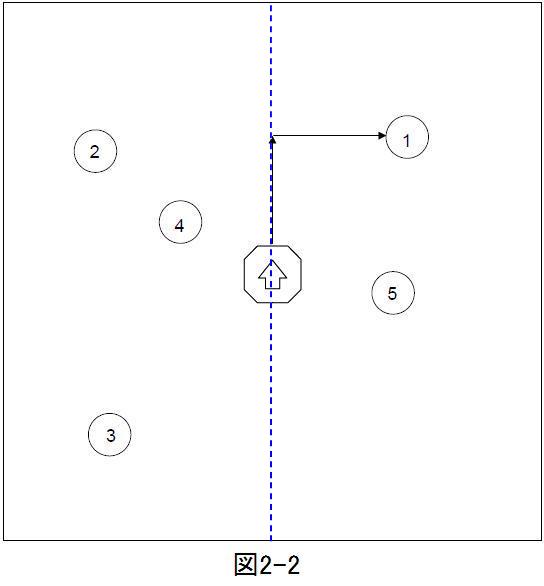
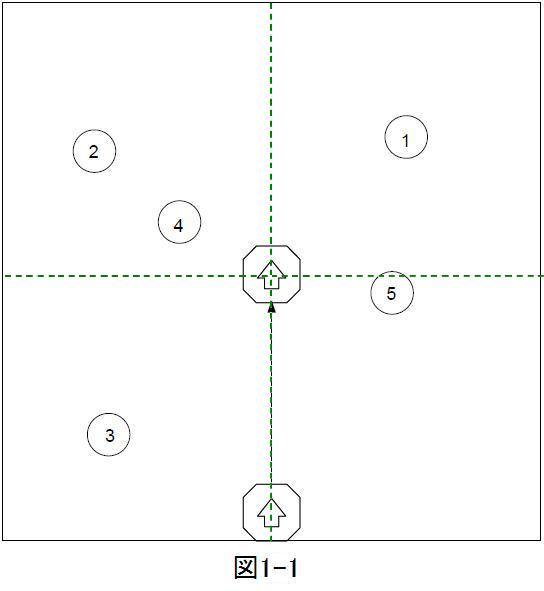
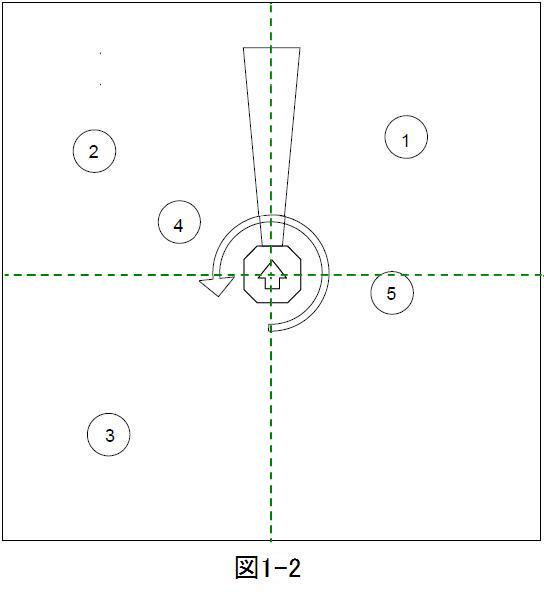
- (1).フィールドの中央へ移動<図1-1>、回転動作を行い超音波センサを用いてそこから発見できるポストを探索する<図1-2>。ポストとの距離・角度より座標を計算、記録する。
このとき、フィールドを<図1-1>のように4つに区切り、右上から反時計回りに第1象限、第2象限、第3象限、第4象限とする。
※このとき、すべてのポストを見つける必要はない。
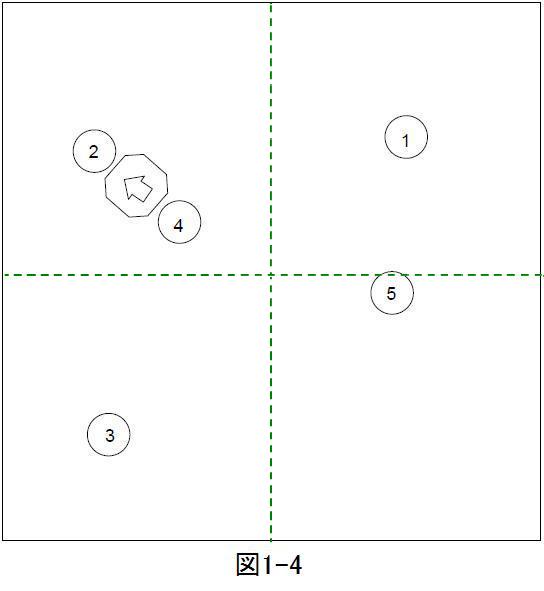
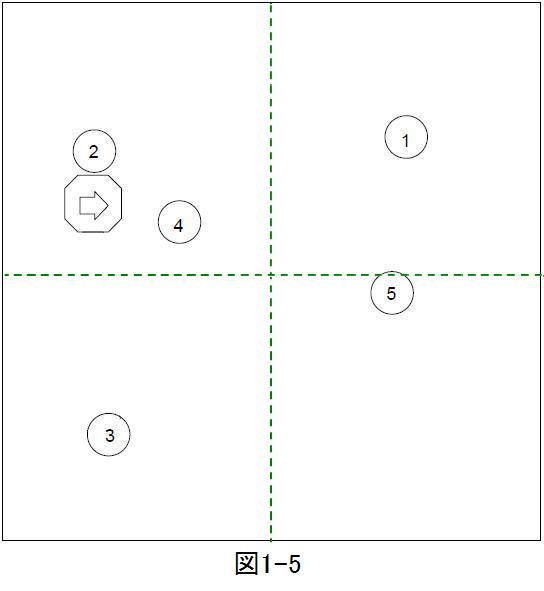
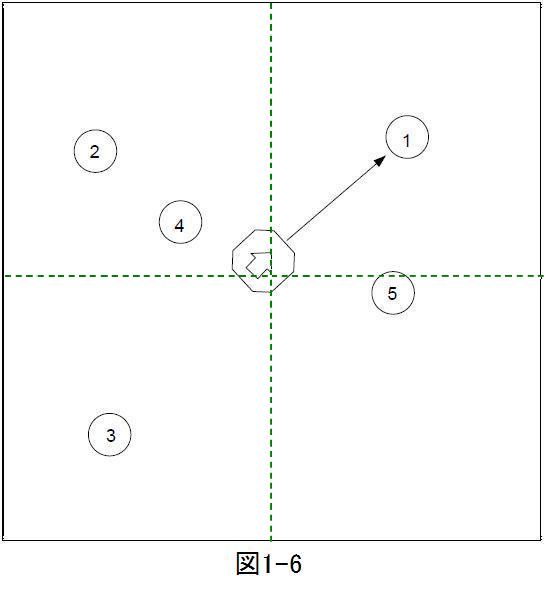
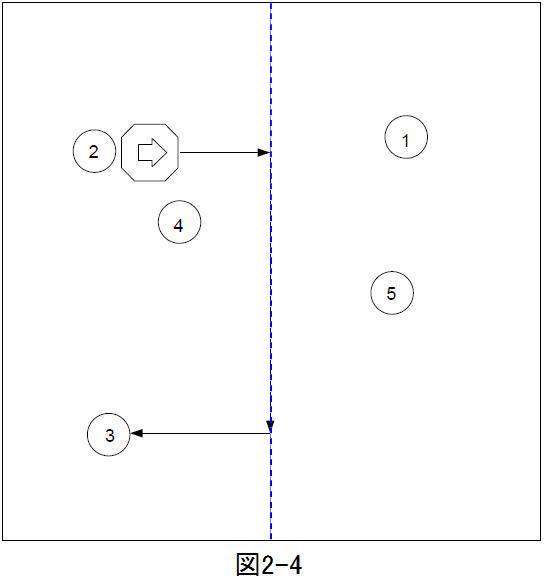
- (2).最も近い位置にあるポストへと接近、獲得を行う。その際、獲得のための周回動作と同時に側面に搭載した超音波センサを用いて、中央からは発見が困難な未発見ポストを探索する<図1-3> 。
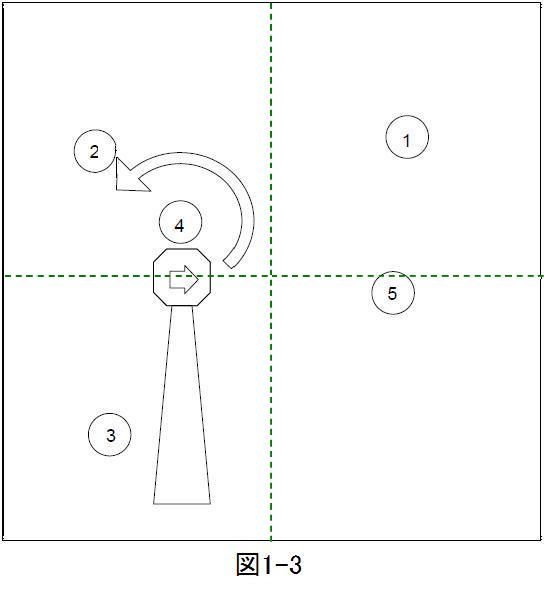
- (3).ポスト周回中に発見したポストは、現在周回しているポストを獲得した後、獲得に向かう。
このとき、ポスト間移動後のポスト(今回の場合ポスト②)ではポスト探索は行わない。
※ただし、現在周回しているポストと同じ象限に発見したポストが存在しない場合、座標だけを記憶し、獲得には向かわない。
(つまり、図1-3の場合は①,③,⑤番のポストは獲得には向かわない。)