4.1 競技一回目
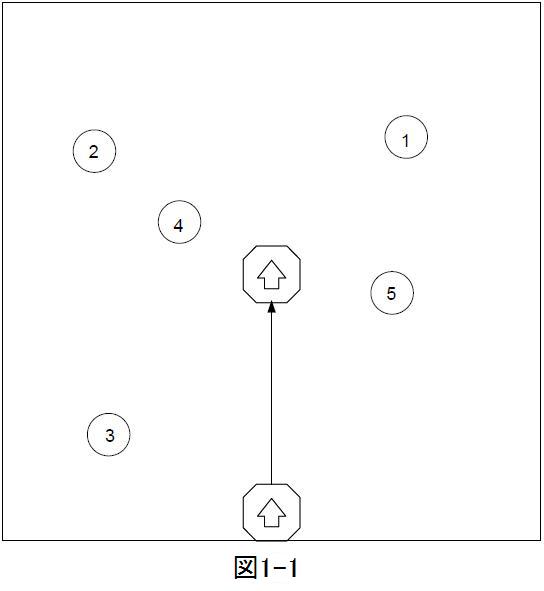
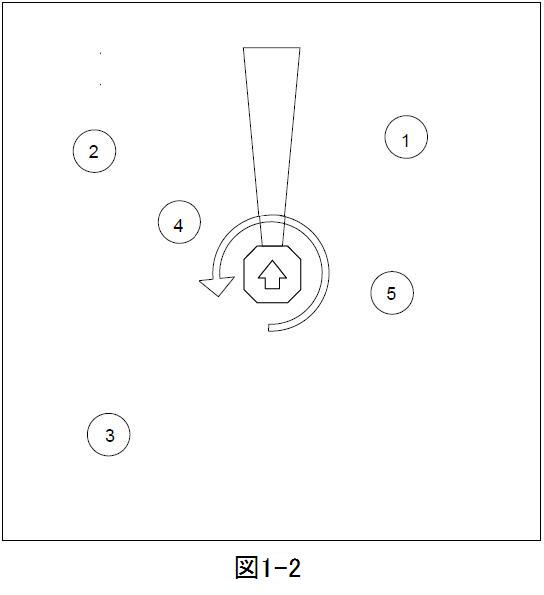
- (1).フィールドの中央へ移動<図1-1>、回転動作を行い超音波センサ・電子コンパスを用いてそこから発見できるポストを探索<図1-2>。ポストとの距離・角度より座標を計算、記録する。
※このとき、すべてのポストを見つける必要はない。
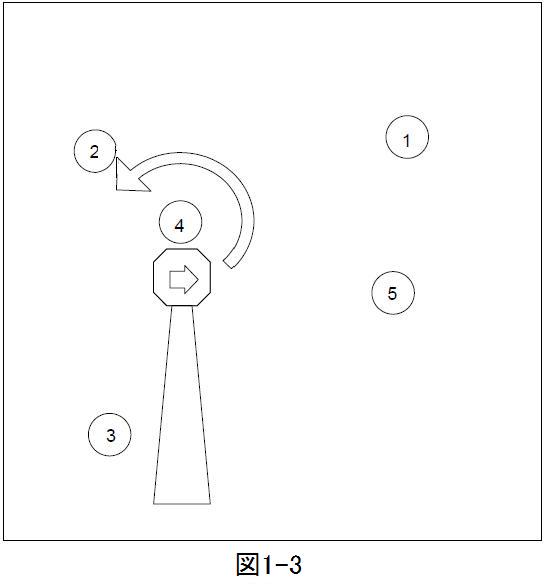
- (2).もっとも近い位置にあるポストへと接近、獲得を行う。その際、獲得のための周回動作と同時に側面に搭載した超音波センサをもちいて、中央からは発見が困難な未発見ポストを探索する<図1-3> 。
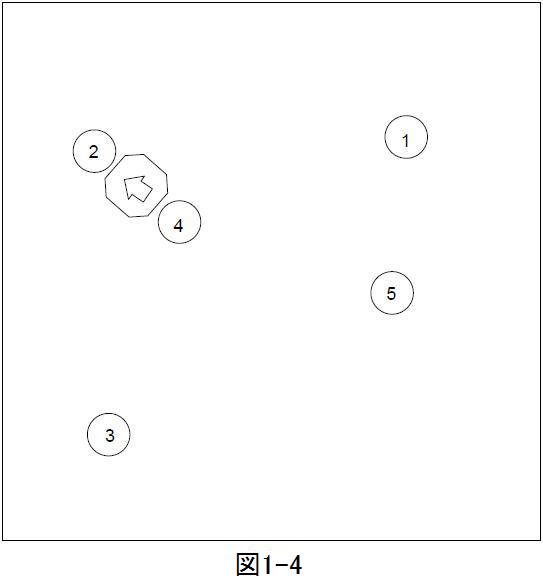
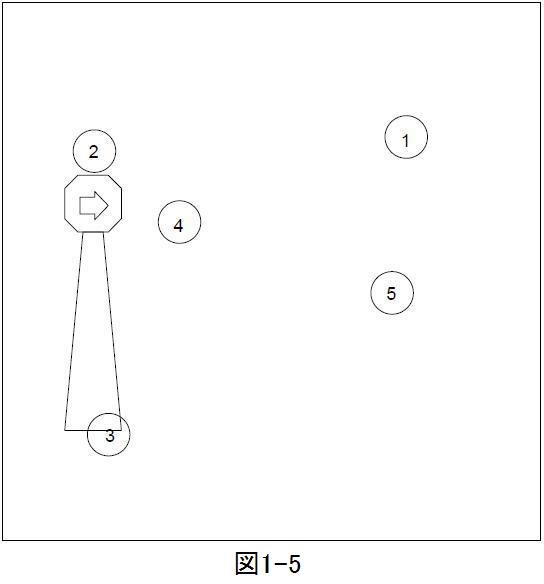
- (3).以上の動作を繰り返し、そのとき本体からもっとも近いポストを順次獲得していく。<図1-4><図1-5>
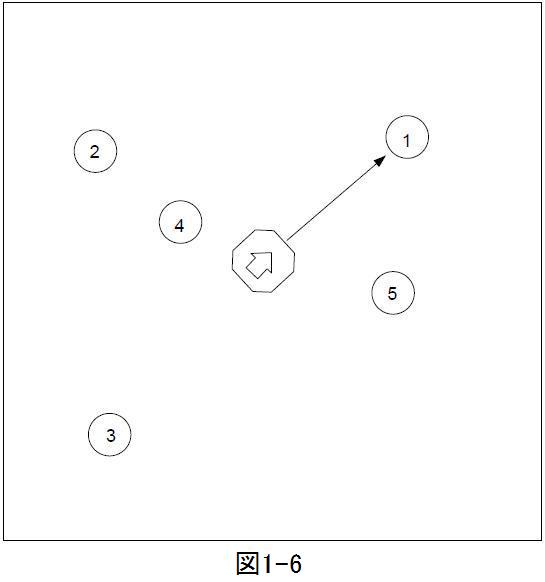
- (4).いくつかのポストが未獲得の状態であり、かつ、MIRS周辺にポストが存在しない場合は、一度中央へもどり、始めの回転動作のときに記録していたポストの座標を基に未獲得のポストへのアプローチを開始する。<図1-6>
4.2 競技ニ回目
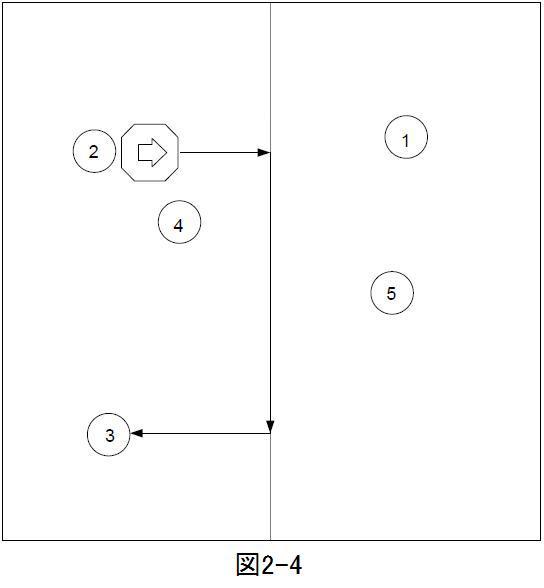
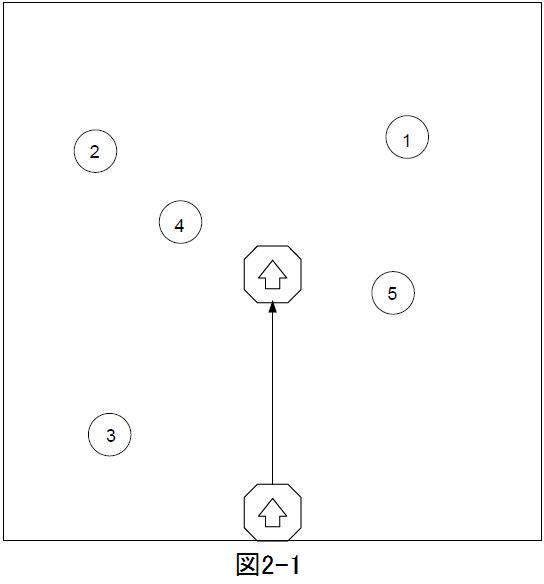
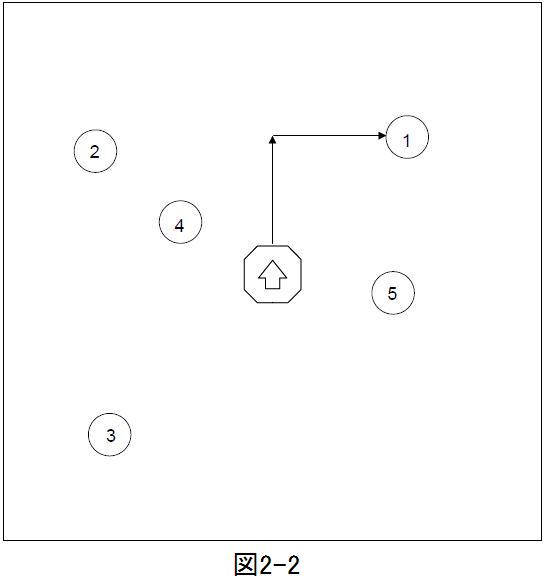
- (1).フィールドの中央へ向かい<図2-1>、一回目の結果からポストの番号と座標のデータを整理し、そのデータをもとに、ポスト番号順にy軸方向(図の縦方向)へ引いた直線を基準として、y軸、x軸方向(図の横方向)のみに移動して、その値周辺へ移動する<図2-2>。
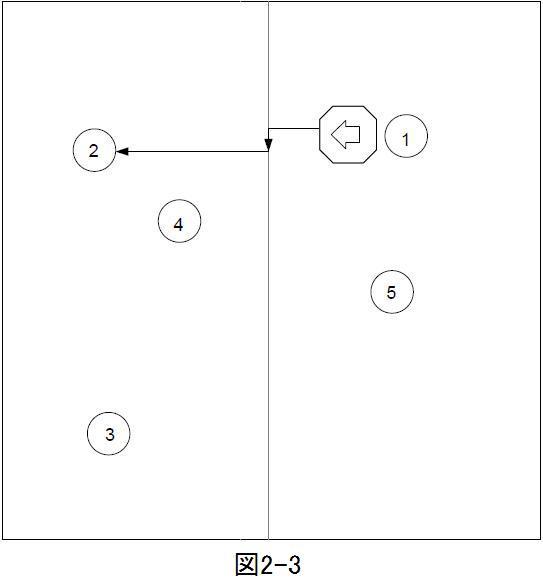
- (2).ポストを獲得後、一度、基準としているy軸に戻り、次のポスト獲得に向かう。
- (3).(2)の動作を繰り返し、全ポストを獲得する。