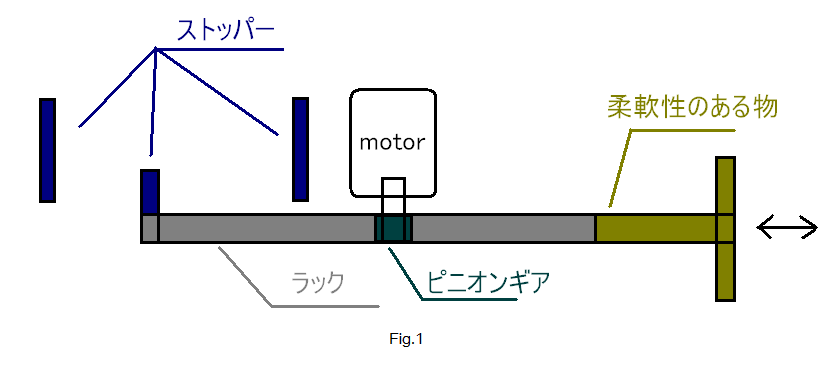
2.ポスト獲得用アームについて
動力はDCモーターを用い、一定以上アームを伸ばさないよう、ストッパーを設ける。
MIRSとポストの間隔は正確にはわからないので、アームに柔軟性を持たせる。柔軟性を持たせることは、
MIRSの位置をずらさないことにも役立つ。アーム伸縮機構のfig1を以下に示す。
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2007.7.10 | 小林優作・中島・渡辺 | 中島 | 初版 | ||
| A02 | 2007.7.20 | 中島 | 中島 | 3.ポスト探索用プロペラの項に説明文を追加 | ||
4.1.ステッピングモータの種類
ステッピングモータは主に2つの種類に分けられ、バイポーラ方とユニポーラ型に分けられるが、4.2.ユニポーラ型ステッピングモータの使い方
普通、個人での工作等に用いられるものはユニポーラ形である。
MIRS0703でもユニポーラ形のステッピングモータを用いる。
ステッピングモータはインダクションモータやDCモータとは異なり、モータにただ単に電源を接続するだけでは回転しない。4.3.励磁の種類
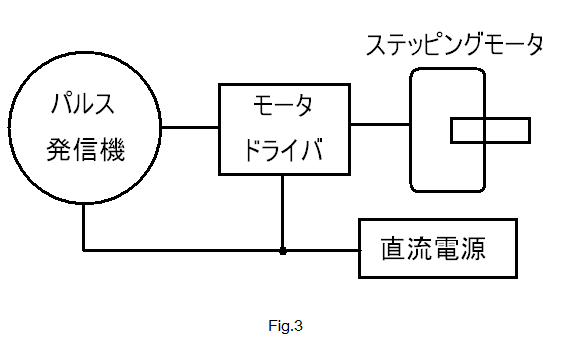
モータを駆動する場合、回転速度や回転角度を決めるパルス発信機、巻線を流す電流を順次切り替える駆動回路(ドライバ)、
回路およびモータを駆動させる直流電源が必要になる。使い方について模式図をfig3に示す。
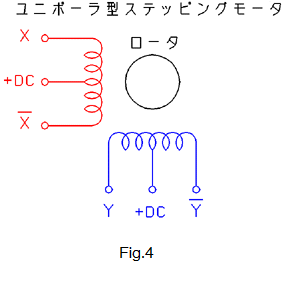
ステッピングモータはDCモータと違ってケース側に巻き線コイルがあり、これをステータと呼んでいる。
一方回転する方はロータと呼ばれている。ステータ側は[X]と[Xバー]によるコイルと、[Y]と[Yバー]によるコイルの
2つのコイルからなる。ユニポーラ型では、それぞれのコイルの中間点からタップが立っていて、そこから電源を供給して
[X]、[Xバー]、[Y]、[Yバー]に対して決まった順番に電流を流すことによってロータを回転させるための磁化を行う。
これを励磁(レイジ)と呼んでいる。
ユニポーラ型ステッピングモータでは、fig4のように6本のケーブルが出ている。
ロータを回転させるための励磁の方法にはいくつかの種類がある。
いずれもパルス信号で+DC端子からその他の各端子(相)に対して電流を流す。
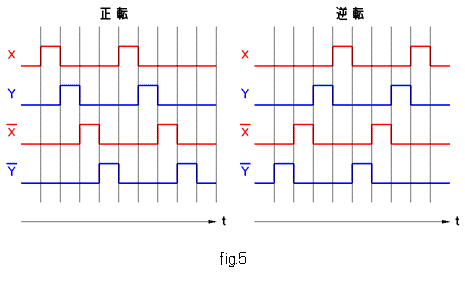
下の各タイミングチャートでは、パルスが出力されている状態(ハイ状態)にそれぞれの端子に対して電流が流れていることを示す。
4.3.1. 1-1相励磁4.4.ステッピングモータを用いる利点
一番簡単な励磁方法で[X]→[Y]→[Xバー]→[Yバー]の順に電流を流していく。4.3.2. 2-2相励磁
逆の順番で電流を流せば逆転する。トルクが小さくあまり安定性が良くなく、実用ではほとんど利用されていない。
1-1相励磁の模式図をfig5に示す
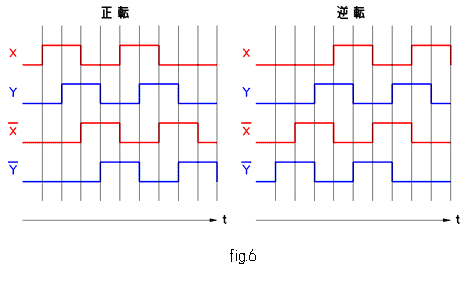
各相のパルス幅が1-1相励磁の2倍の幅となり、次の相と1パルス分ずつずらしながら同時に励磁する方法。4.3.3. 1-2相励磁
1-1相励磁と同様に、[X]→[Y]→[Xバー]→[Yバー]の順で正転、その逆の順で逆転する。
1-1相励磁に比べて回転が安定し、高いトルクが得られるので良く利用されるが、消費電力は2倍必要である。
2-2相励磁の模式図をfig6に示す
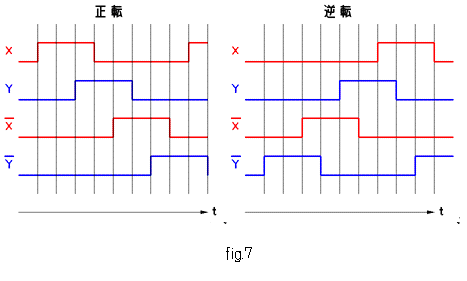
各相のパルス幅を3とし、次の相とは2パルス分だけずらして励磁していく方法。
1-1相励磁と2-2相励磁を交互に繰り返しているのと同じ状態である。
この励磁方法は1パルス幅ごとに回転する角度が1-1相励磁と2-2相励磁に比べて半分になる
という特徴(ハーフステップ動作)がある。
2-2相励磁の模式図をfig7に示す
回転角制御が可能なため、ロータリエンコーダを用いてフィードバック機構を作る必要がない。
5.1.ポスト間直接移動
ポスト間の移動を無駄なく行うために、ポスト間直接移動法を取り入れる。5.2.プロペラ制御
過去のグループ、MIRS0403とMIRS0604 がこの方法を取り入れているので参考にする。(参考文献についてはまとめて後述する)
(1)int post_to_post2(int target_post, int next_post_no)
二つのポスト間を直接移動する関数。引数target_postとnext_post_noで、
現在のポスト番号(P1とする)と次に接近するポスト番号(P2とする)を与える。
この関数は post_get()終了後のP1周回開始点から始まる。
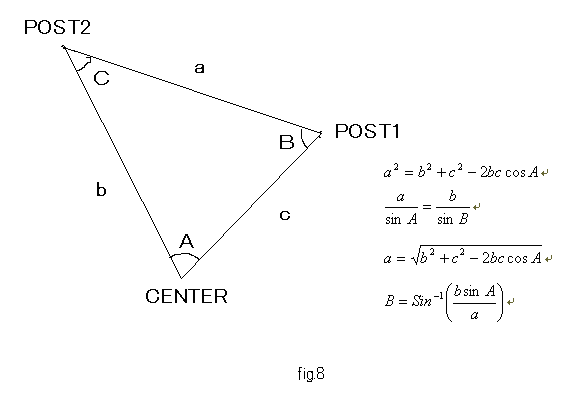
アルゴリズムとして、フィールド中心点と二つのポストの中心点を結ぶ三角形を考える。
まずP1とP2の座標から、P1の中心点とP2の中心点を結ぶ直線aの長さを余弦定理により求める。
求めた直線aの長さと、フィールド中心点から見たP1とP2の間の角度A、およびフィールド中心点からP2の中心点までの距離bから、
正弦定理を応用して、P1の中心点とフィールド中心点を結ぶ直線cと直線aのなす角度Bを求める。
求めた角度BだけP1の周回を移動することにより、P1とP2を結ぶ直線a上まで移動することができる。
その後、直線aの長さとプロペラの超音波センサの値を比較し、誤差が大きければポスト周回軌道上を前後に移動して補正を行う。
補正終了後、90度回転しさらにプロペラの超音波センサで補正を行う。
この時、超音波で読み取った値を、P1とP2間の距離として改めて保存する。
保存されたポスト間の距離をもとに、P2の手前30cmまで移動し正対補正を行い、その上でP2の周回開始点まで移動する。
計算方法をfig8に示す
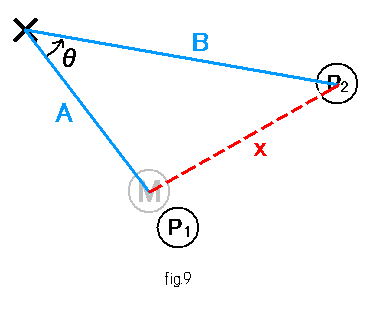
(2)fig9のような三角形を考える。×はMIRSがその場回転してポストを探索する基準点である。
ここで注意するのは、『BはMIRSの基準点での超音波探索によって測定された値ではない。』ということだ。
超音波センサで測定された値は、基準点からポスト中心までではなく、
MIRS前方の超音波センサの計測開始点(※1)からポスト側面までの距離である。
したがって、基準点からP1,P2までの超音波センサでの測定値をそれぞれr1,r2とすると、
A = r1
B = r2 +(MIRSの中心~超音波センサの計測開始点までの長さ)+(ポストの半径)
である。導出式自体は変わらないので、その式に基づいて計算すれば、
ポスト間の直接移動に必要なポスト間の距離・角度が得られる。
(※1)超音波センサの計測開始点
データシートによると、超音波センサの先端ではなく、だいたい中間ほどである。
計算方法をfig9に示す
今回プロペラに取り付ける超音波センサは1つだけであり、MIRSのシャーシから幾分かはみ出している。5.3.アーム制御
従って、MIRSの状況に応じて超音波センサの位置を変える必要がある。
次に各状況に応じた、プロペラの動き(超音波センサを基準に考えた)を記す。
1.競技場中心でのポスト探索
MIRS本体はその場から動かず、プロペラを1周、逆周りに1周を繰り返す。
同じ方向に回転を繰り返すと、コードが絡まるなどの問題があるためである。
2.ポスト接近&周回時
右に移動させ、ポストに対する正対補正と周回の邪魔にならないようにする。
3.ポスト間直接移動時
「ポスト間直接移動」で記したように、ポスト周回時は右に90度回転した後は前に移動させる。
その後、次のポストに移動するまで前方で固定し、ポスト手前30cmまで移動して正対補正を行う。
「2.ポスト接近&周回時」と「3.ポスト間直接移動時」を繰り返し、
プロペラがMIRSの動作に支障を来たさずに機能するようにする。
MIRS0703では、機体左側に取り付けたアームによりポストを獲得する。
ポスト獲得のプログラムは、赤外線コードによりポスト番号を記憶した後に走らせる。
アームはモーターの回転のみの制御なので、プログラムは簡単に組みあがる。
| 関連文書 |
|---|