3.システムの特徴
3.1.ポストの探索方法
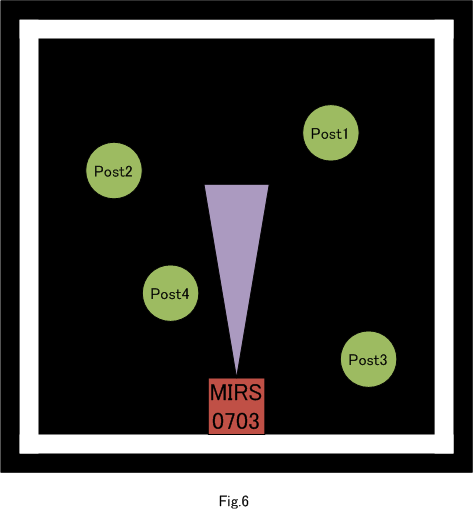
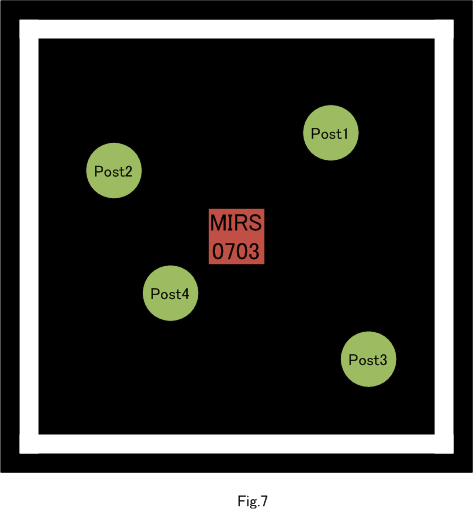
競技開始後、競技場の中央まで移動し、回転しながらポストを探索する方法を取る。3.2.探索後のポスト間の移動方法
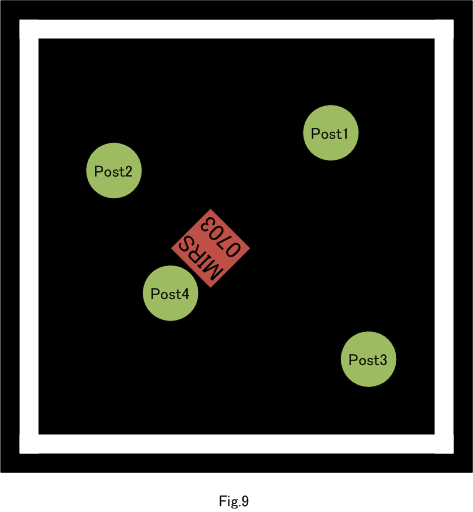
このときMIRS本体が回転した場合、若干のズレによるMIRSの現在座標に誤差が生じる可能性があるため、
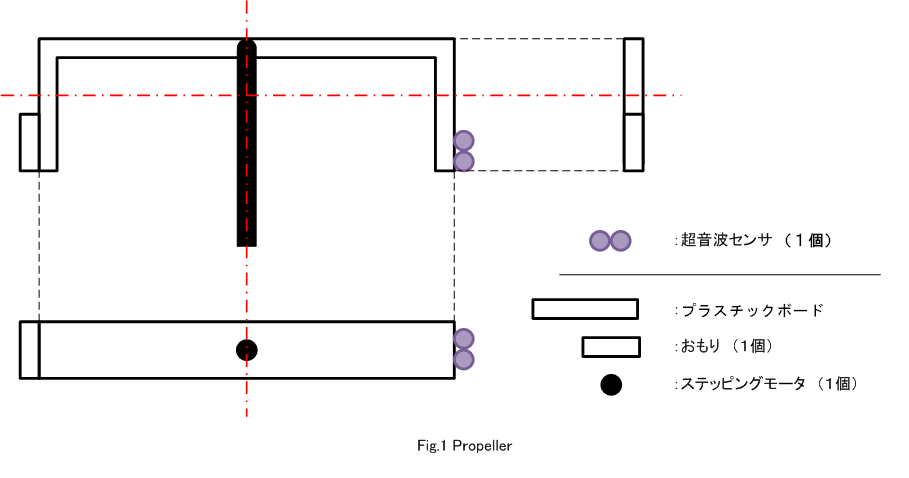
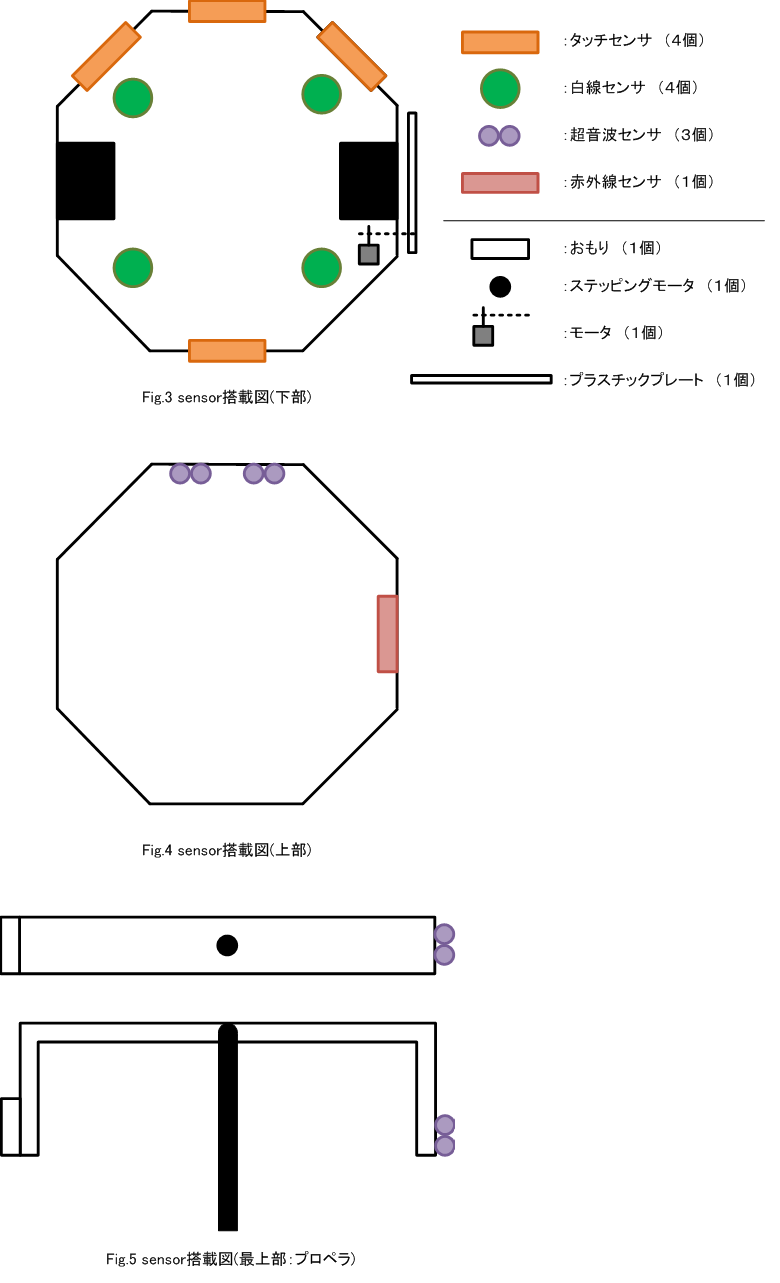
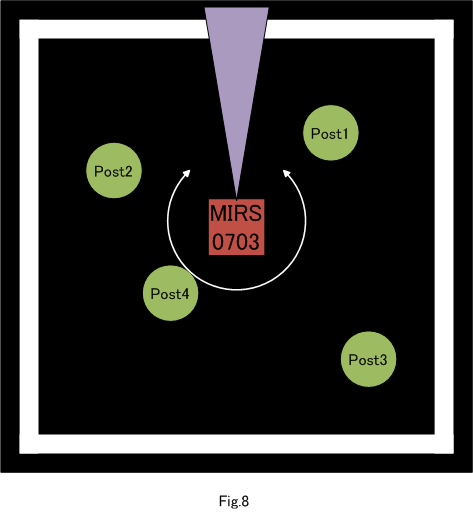
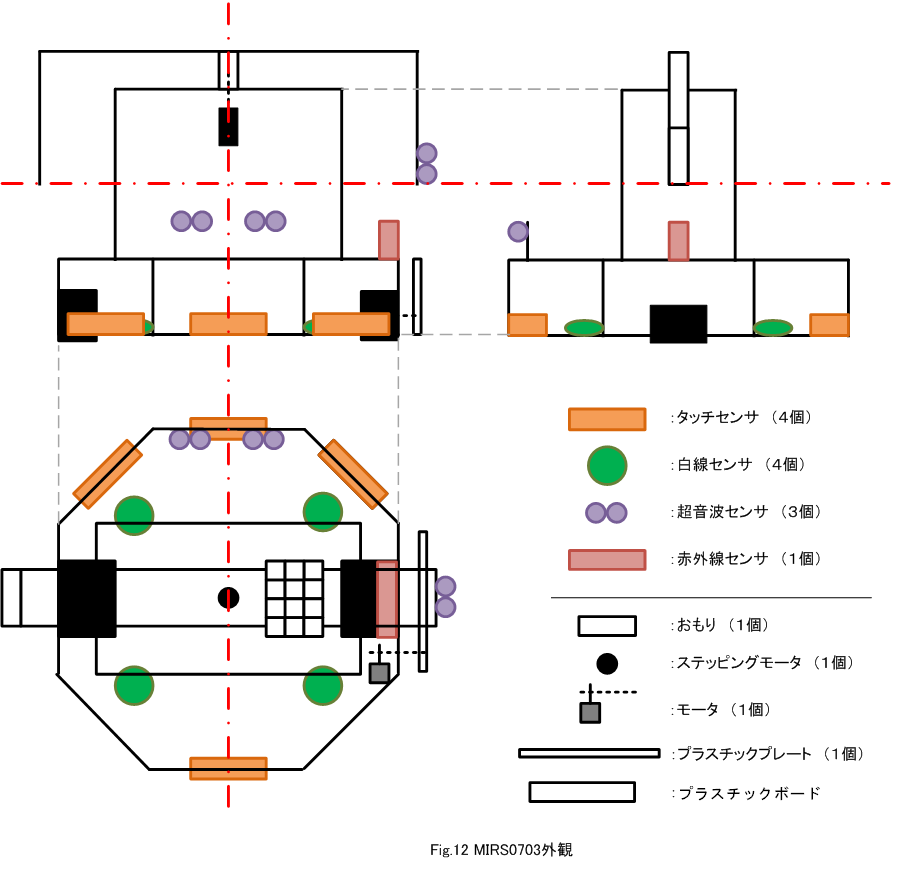
MIRS上部に超音波センサをつけたプロペラを搭載し、これを回転させることによりポストの探索を行う。
このプロペラはステッピングモータにより回転させることにより、正確な回転・停止を素早く行うことが可能になる。
MIRS本体が回転するのに比べ、早く、正確にポストの探索を行うことが可能である。
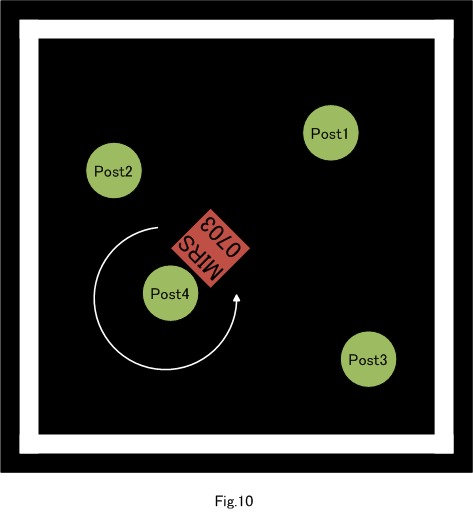
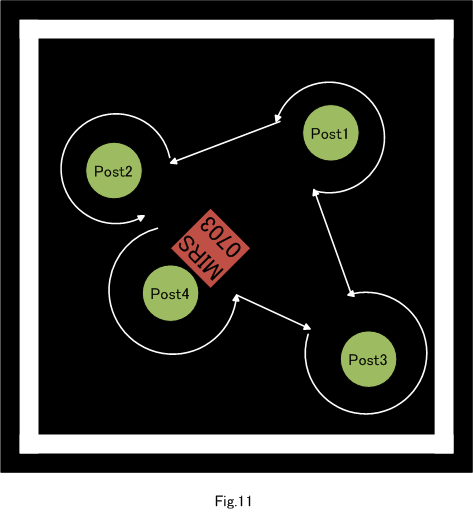
ポスト間の最短距離を直線に移動する方法を用いる。基準となる競技場中央に何度も戻ることで、3.3.ポスト番号の判別法
時間のロス、座標のズレが起こる可能性を考えこの方式を取ることにした。
各ポストの位置が把握できれば、角度や距離から最短距離を計算できるであろうと考えた。
(詳細は5.動作概要に記載する)
標準機同様、ポストを周回し、赤外線センサを用いてポスト番号を読み取る。3.4.ポストの獲得方法
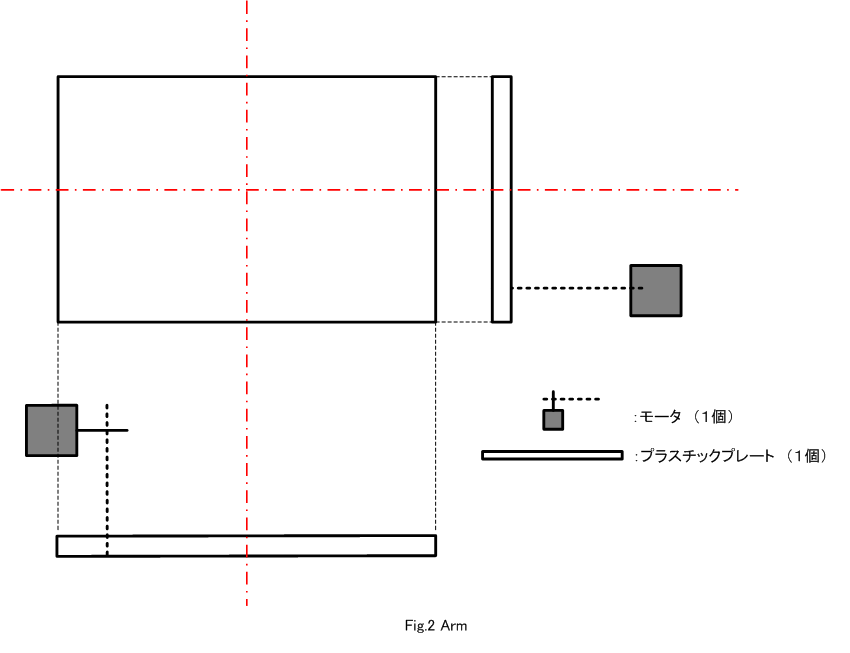
赤外線センサ下部にアームをつけ、これを伸ばすことにより、ポストを獲得する。
この方法を用いることにより、赤外線センサでポストを判別した後、そのままポスト獲得動作に移ることができる。