|
沼津高専 電子制御工学科 |
||||||
|
||||||
|
改訂記録 |
||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||
|
A01 |
2005.10.31 |
奥澤・岡島 |
大木 |
初版 |
||
|
A02 |
2005.11.18 |
奥澤 |
大木 |
電子コンパスボード、白線センサボードの回路図を修正 |
||
|
A03 |
2006.1.20 |
奥澤 |
大木 |
白線センサボード構成図の変更、電子コンパスボードに説明を追加 アーム用モータの電源供給変更 |
||
目次
目的
本文書は、MIRS0504におけるエレクトロニクス部の各回路基板の製造仕様書の作成に必要な事項を述べる。
取り除いたもの・・・ 白線センサ(競技場の白線判別用)、タッチセンサ、正面の赤外線センサ
追加したもの・・・ 白線センサボード(ポスト番号判別用)、アーム制御ボード
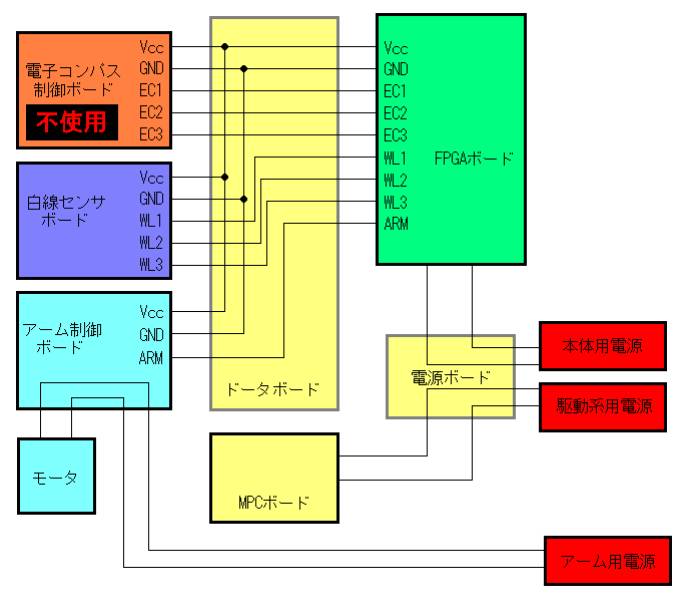
標準機に変更を加えた部分の構成図
電子コンパスボード(競技会では使用しない)
MIRSが向いている方角を示す3bitの信号を出力する。
電子コンパスボード回路構成図
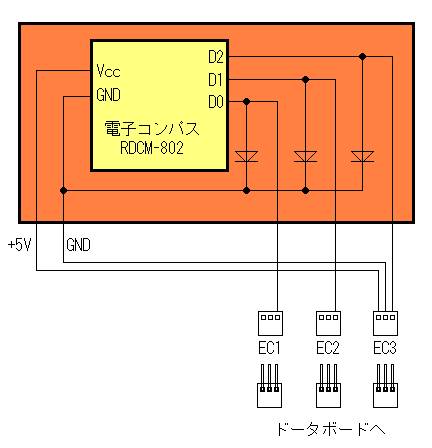
47×72ユニバーサル基板を使用して作成する。
デジタルコンパスRDCM-802性能表
白線センサボード
5個の白線センサを搭載するため、標準では5bitの信号が出力される。
これをプライオリティエンコーダ74148を用いて回路を設計し、3bitの2進数出力に変換する。
FPGAボードにおける信号入力を2bit分節約できる。
白線センサボード回路構成図
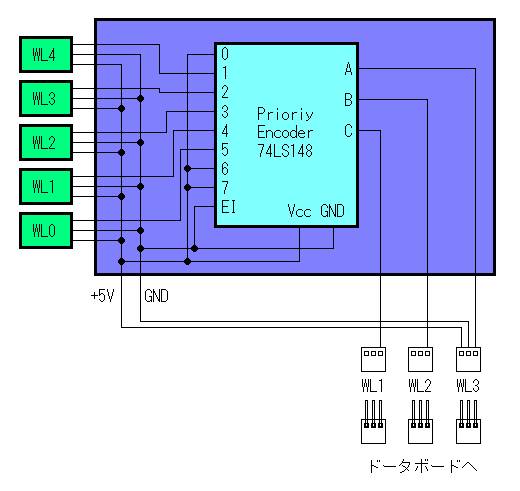
47×72ユニバーサル基板を47×26に切断したものを使用して作成する。
74148詳細
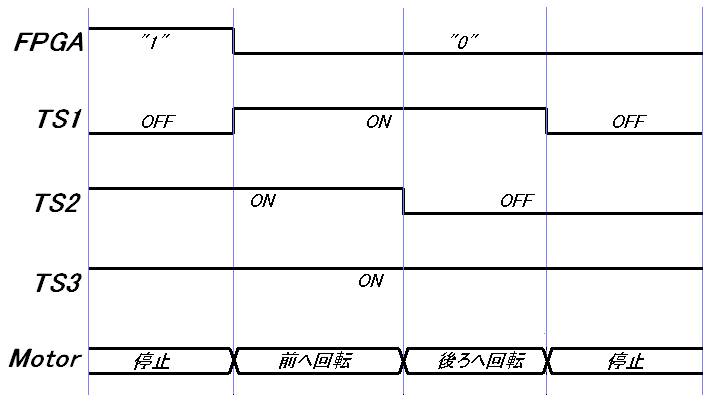
FPGAボードからの入力信号が入った時にアームが動き出し、
アームに取り付けたタッチセンサが押されたらリレーによってスイッチが入れ替わり逆回転する。
そして、またタッチセンサが押されたら停止する回路である。
アーム制御ボード回路構成図
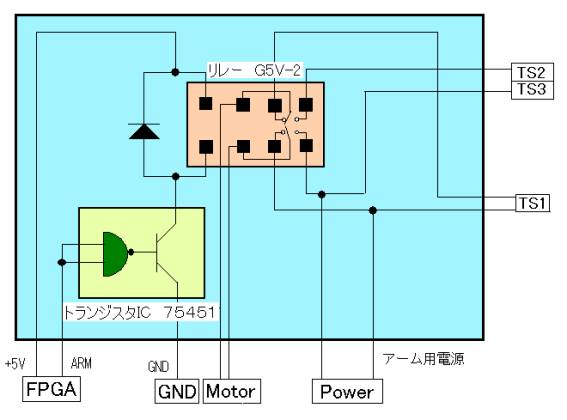
CADを使用して基板を作成する。寸法は下図のようになる。
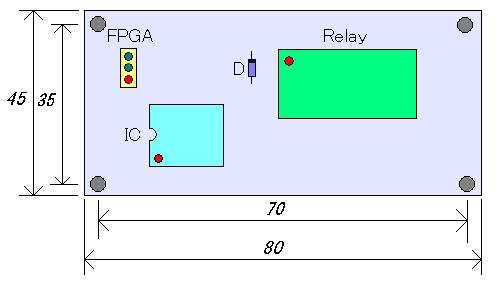
リレーを動作させるための電源はFPGAボードからとり、モータを動作させるための電源は電源ボード(駆動用電源)からとる。
TS1はアームの後方に配置し、TS2はアームの先端、TS3はアームが最大まで伸びたときに押されるように配置する。
タイミングチャート
標準機のドータボードをそのまま利用する。
回路切断やジャンパ線使用による回路の変更は行わない。
ドータボード回路図
ピン配置
灰色の部分は新しく追加した機能
|
ICソケットJP番号 |
FPGAのピン番号 |
名称 |
IN/OUT |
機能 |
|
JP20A-1 |
144 |
RE_XB |
IN |
ロータリエンコーダX_B相 |
|
JP20A-2 |
147 |
RE_XA |
IN |
ロータリエンコーダX_A相 |
|
JP20A-3 |
148 |
RE_XB |
IN |
ロータリエンコーダY_B相 |
|
JP20A-4 |
149 |
RE_XA |
IN |
ロータリエンコーダY_A相 |
|
JP20A-5 |
150 |
WL1 |
IN |
白線センサ信号1 |
|
JP20A-6 |
157 |
WL2 |
IN |
白線センサ信号2 |
|
JP20A-7 |
158 |
WL3 |
IN |
白線センサ信号3 |
|
JP20A-8 |
159 |
ARM |
OUT |
アーム制御信号1 |
|
JP20A-9 |
160 |
IRS1 |
IN |
赤外線センサ信号1 |
|
JP20A-10 |
161 |
- |
- |
空き |
|
JP20A-11 |
162 |
- |
- |
空き |
|
JP20A-12 |
163 |
- |
- |
空き |
|
JP20A-13 |
164 |
- |
- |
空き |
|
JP20A-14 |
166 |
- |
- |
空き |
|
JP20A-15 |
167 |
- |
- |
空き |
|
JP20A-16 |
168 |
- |
- |
空き |
|
JP20A-17 |
169 |
MR1 |
OUT |
右モータPWM1 |
|
JP20A-18 |
170 |
MR2 |
OUT |
右モータPWM2 |
|
JP20A-19 |
172 |
ML1 |
OUT |
左モータPWM1 |
|
JP20A-20 |
173 |
ML2 |
OUT |
左モータPWM1 |
|
名称 |
IO port Address [hex] |
R/W |
Port Name |
機能 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
汎用入力 |
0140 |
R |
GIO |
デジタル信号入力 MP:モータ用電源のON/OFF IRS:赤外線センサ(赤外線の有無の確認) WL1-3:白線センサ1-3(3bitの2進数)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
汎用出力 |
0160 |
W |
Arm |
デジタル信号出力 0bit目のみ使用する。 アーム制御の信号出力に用いる。 2^20/(133*10^-6)≒7.9[msec]の間だけ“0”になるような信号を出力する。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
アームの信号出力を160番地の0bit目からJP20A-8に出力するように回路を変更する。
各信号はFPGAのクロックに同期させる。
|
関連文書 |
||
|
ドキュメント番号 |
ドキュメント名 |
作成者 |
|
電子コンパスボード製造仕様書 |
奥澤 |
|
|
白線センサボード製造仕様書 |
奥澤 |
|
|
アーム制御ボード製造仕様書 |
岡島 |
|