|
������ �d�q����H�w�� |
||||||
|
||||||
|
�����L�^ |
||||||
|
�Ő� |
�쐬�� |
�쐬�� |
���F |
�������e |
||
|
A01 |
2005.10.24 |
���V�A��{ |
�g���J |
���� |
||
|
A02 |
2005.11.30 |
���V�C��{ |
�g���J |
�t���[�`���[�g�A�g�p��������ڂ����� |
||
|
A03 |
2006.1.24 |
���V�C��{ |
�g���J |
�\�t�g�̎d�l�ύX���A�b�v�B�J�����ɂ��|�X�g���ʂ�f�O |
||
�ڎ�
1. �͂��߂�
2. ���샂�[�h
�{�h�L�������g�́AMIRS0503��{�v���ɋK�肳�ꂽ�V�X�e���̓���K��A��ԑJ�ڂ���������e�^�X�N�̊J���ɕK�v�Ȏ������q�ׂ�B
A) �������샂�[�h�T
�����ʒu���甒���܂Ō�ނ��A90���E����B
B) �R�[�X�T�����[�h�T
�O��Ɉړ��������̒����g�Z���T�Ń|�X�g�̂Ȃ�Root��T������BRoot�����܂�����A90�������A��������Root��MIRS�̐i�s�����Ƃ���
C) �|�X�g�T�����[�h�T
���i���A�E�̒����g�Z���T�Ń|�X�g�̒T�����s���B�����܂œ��B�������~���|�X�g�T�����[�h�U��
D) �|�X�g�T�����[�h�U
��i���A���̒����g�Z���T�Ń|�X�g�̒T�����s���B�����܂œ��B�������~���|�X�g�T�����[�h�V��
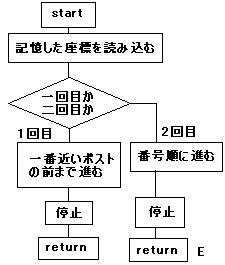
E) �|�X�g�T�����[�h�V
1��ڂ�C,D�Ŏ擾�����|�X�g�̈ʒu�̋߂����ɃR�[�X��̃|�X�g�̐����̈ʒu�ɒ�~�|�X�g�ڋ߃��[�h�T�ցB2��ڂ́A�|�X�g�ԍ����ɓ��l�̓�����s���B
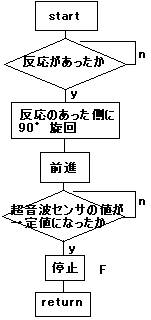
F) �|�X�g�ڋ߃��[�h�T
�����������������g�Z���T�̕�����90������A�O���̒����g�Z���T�Ń|�X�g�ڋ߁B�|�X�g���[�h��
G) �|�X�g���ʃ��[�h
�ԊO���M���ɂ��A�|�X�g�ԍ��ʁB
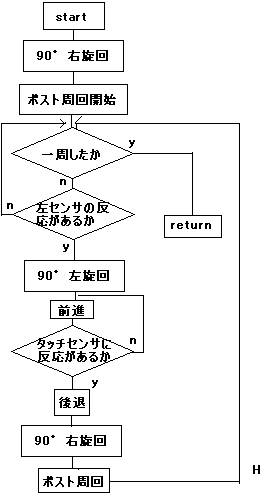
H) �|�X�g���[�h
90���E���|�X�g������B�ԊO�����o���Ă���ʒu���m�F������A90��������X�C�b�`�֒��i���O���̃^�b�`�Z���T��������������^�����J�n�ʒu�܂ňړ��A�R�[�X���A���[�h�ցB�|�X�g�����ׂĊl�������Ȃ�A�I���B
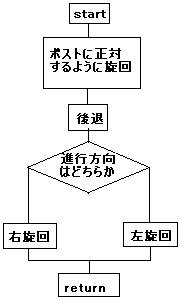
I) �R�[�X���A���[�h
�|�X�g���l���������ƁA�R�[�X�֕��A����B�R�[�X�֕��A������i�s������90������B�|�X�g�T�����[�h�V��
A�`I�܂ł̓��샂�[�h�ɑΉ������t���[�`���[�g
A) first_mode
�����E�E�Evoid first_mode1(void)
B)�@corse_search1
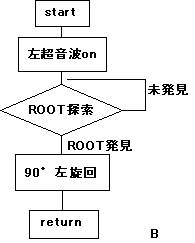
�����E�E�Evoid corse_search1(void)
C�jpost_search1
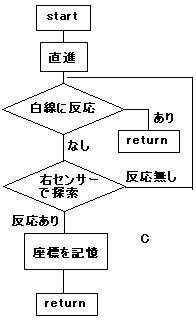
�����E�E�Eint post_search2(double*)
D)�@post_search2
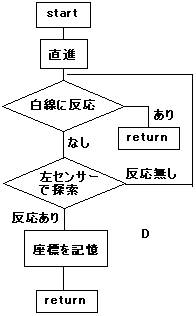
�����E�E�Eint post_search1(double*)
E)�@post_search3
�����E�E�Edouble post_approach1(void)
F)�@post_approach1
�����E�E�Eint post_approach2(void)
G)�@post_check
�����E�E�Eint post_check(void)
H)�@post_shukai
�����E�E�Eint post_shukai(void)
I)�@course_return
�S�̂�ʂ����t���[�`���[�g
�@�@�@�@�@�@�@�@
�����E�E�Eint main1(void) int main2(void)
|
�| |
�������� |
�������� |
�R�[�X�T�� |
�|�X�g�T�� |
�|�X�g�T�� |
�|�X�g�ڋ� |
�|�X�g�ڋ� |
�|�X�g���� |
�|�X�g���� |
�����m�F ���[�h |
|
�������� |
�| |
���Z1��� |
���Z2��� |
|
|
|
|
|
|
|
|
�������� |
|
�| |
�����ɑ��ĕ��s�ȏꍇ |
|
|
|
|
|
|
|
|
�R�[�X�T�� |
|
|
�| |
�E���Ƀ|�X�g���Ȃ��ꍇ |
|
|
���Z2��� |
|
|
�������m |
|
�|�X�g�T�� |
|
|
|
�| |
�|�X�g�������ł��Ȃ��ꍇ |
���E�Ƀ|�X�g������ꍇ |
|
|
|
�������m |
|
�|�X�g�T�� |
|
|
|
�������m |
�| |
���E�Ƀ|�X�g������ꍇ |
|
|
|
�������m |
|
�|�X�g�ڋ� |
|
|
|
�����g�Z���T�ɔ������Ȃ��ꍇ |
|
�| |
90�x�����ꍇ |
10cm���x�̋����ł��� �ꍇ |
|
�������m |
|
�|�X�g�ڋ� |
|
|
|
�����g�Z���T�ɔ������Ȃ��ꍇ |
|
|
�| |
10cm���x�܂ŋ߂Â����ꍇ |
|
�������m |
|
�|�X�g���� |
|
|
|
|
|
�|�X�g�ԍ����m�F�ł��Ȃ��ꍇ |
|
�| |
�|�X�g�ԍ����m�F�����ꍇ |
|
|
�|�X�g���� |
|
|
|
�|�X�g�l�� |
|
|
|
�|�X�g���l���ł��Ȃ��ꍇ |
�| |
�������m |
|
�����m�F ���[�h |
|
�������m |
|
|
|
|
|
|
|
�| |
�J�������W���[���ɂ���
1. �J�������W���[������摜�f�[�^����荞��
2. ���[�p�X�t�B���^(LPF)�ŃA�i���O�M������
3. AD�ϊ���Ńf�W�^���M���ɕϊ�
4. 8�r�b�gD-ff�ɐM����ʂ�(D-ff�Ɉꎞ�ۑ�)
5. �N���b�N�̓��B�Ƌ���FPGA��8�r�b�g�f�[�^�𑗐M
6. ���炩���߃|�X�g�ԍ���2�i����Ή����������̂�p�ӂ��Ă����A�����Ɣ�ׂ邱�Ƃɂ���ă|�X�g�ԍ��̎��ʂ��s���B
�f�o�C�X�h���C�o
�g�p�f�o�C�X�t�@�C�����Fadc1
read���[�h�̎���PIC��AD�ϊ�����8bit�̐M�����Alcd��p���Ȃ����߂ɋĂ���s�������荞�ރf�o�C�X�h���C�o���쐬����B
�g�p���郂�[�h�F�|�X�g���ʃ��[�h
�g�p����I/O�A�h���X�F0102H
���W���[�ԍ��F�U�S
�}�C�i�[�ԍ��F�O
���̑���
l �����Z���T�f�o�C�X�h���C�o
l �ԊO���Z���T�f�o�C�X�h���C�o
l �^�b�`�Z���T�f�o�C�X�h���C�o
l �����g�Z���T�f�o�C�X�h���C�o
l PWM�E���[�^���[�G���R�[�_�@RT�^�X�N���W���[��
�ɂ��Ă�MIRS�W���@�̂��̂𗘗p����B
�W���@����g�p�����
|
���� |
���� |
�߂�l |
���� |
|
main |
int main(void); |
0 |
���C�� |
|
initialize |
int initialize(void); |
0 |
������ |
|
rm_data |
void rm_data(int *, int *, int *); |
0 |
����|�X�g�f�[�^���� |
|
circle_position |
void circle_postion(void); |
0 |
���a�ւ̈ړ� |
|
post_approach |
int post_approach(int); |
0 �܂��� 9999 |
�|�X�g�ڋ� |
|
post_select |
int post_select(int); |
-1
or ���̃|�X�g�ԍ� |
���|�X�g�I�� |
|
correct_direction1 |
int correct_direction1(void); |
0 |
�|�X�g�ڋߑO�̊p�x� |
|
correct_direction2 |
int correct_direction2(void); |
0 |
�|�X�g���̊p�x� |
|
irs_code_get |
int irs_code_get(int); |
�ԊO���R�[�h or 0 |
�ԊO���̃R�[�h���� |
|
uss_get |
int uss_get(int); |
����f�[�^ |
�����g�ɂ�鋗������ |
|
���� |
���� |
�߂�l |
���� |
|
pwm_enco_start |
void pwm_enco_start(int); |
�Ȃ� |
RT�^�X�N�X���b�h���J�n |
|
pwm_enco_stop |
void pwm_enco_stop(void); |
�Ȃ� |
RT�^�X�N�X���b�h���~ |
|
pwm_enco_restart |
void pwm_enco_restart(void); |
�Ȃ� |
RT�^�X�N�X���b�h���ĊJ |
|
encoder_data |
void encoder_data(float *lm, float *rm, float *lv,
float *rv, int *br); |
�Ȃ� |
100[ms]���Ƃ̍��E�̃^�C���̉�]����,���x��Ԃ� |
|
encoder_data2 |
void encoder_data2(float *la, float *ra, int *br); |
�Ȃ� |
100[ms]���Ƃ̍��E�̃^�C���̉�]�p�x��Ԃ� |
|
encoder_data3 |
void encoder_data3(float *la, float *ra, int *br); |
�Ȃ� |
���E�̃^�C���̉�]�p�x�̍��v��Ԃ� |
�V�����p�����
|
���� |
���� |
�߂�l |
���� |
|
Course_return |
int course_return(void); |
�Ȃ� |
�|�X�g�����R�[�X���A |
|
main1 |
int main1(void) |
0 |
���C�����i1���ځj |
|
main2 |
int main2(void) |
0 |
���C�����i2���ځj |
|
first_mode1 |
void first_mode1(void) |
�Ȃ� |
MIRS�̋N������я������� |
|
course_search |
void course_search(void) |
�Ȃ� |
�ړ��R�[�X�T�� |
|
post_search1 |
int post_search2(double*) |
0 or 1 |
MIRS�E���̃|�X�g�T��(�O�i) |
|
post_search2 |
int post_search1(double*) |
0 or 1 |
MIRS�����̃|�X�g�T��(��i) |
|
Move_post_position |
Int move_post_position(void) |
0 |
�R�[�X��̃|�X�g�ɐ����Ȉʒu�Ɉړ� |
|
post_approach |
float post_approach1(void) |
Y�̒l |
�|�X�g�Ɉ�苗���ڋ߂���т������W�L�� |
|
post_get |
int post_shukai(void) |
�Ȃ� |
�|�X�g���� |