|
沼津高専 電子制御工学科 |
||||||
|
||||||
|
改訂記録 |
||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||
|
A01 |
2005.9.8 |
斉藤 |
蛭ヶ谷 |
初版 |
||
|
A02 |
2005.9.15 |
斎藤 |
蛭ヶ谷 |
AD変換器について デバイスドライバについて |
||
目次
1、はじめに
2、システム概要
3、機能・性能
4、実現方法
MIRSの基本仕様を記述する。
1、
システム要求
一度目の競技ではMIRSが前後に移動し、ポストのない直線を検知する。いま現在MIRSが止まっている場所を原点とし、基準とする。その後直進しMIRSの左右から超音波を発信し、ポストを検知する。
はじめに見つけたポストから確認しに行く。カメラによってポスト番号を確認しながらポストはランダムに獲得。
二度目の競技では一度目に確認した番号順にポストを獲得していく。
詳しくはシステム提案書に記載。
2、
ハードウェア
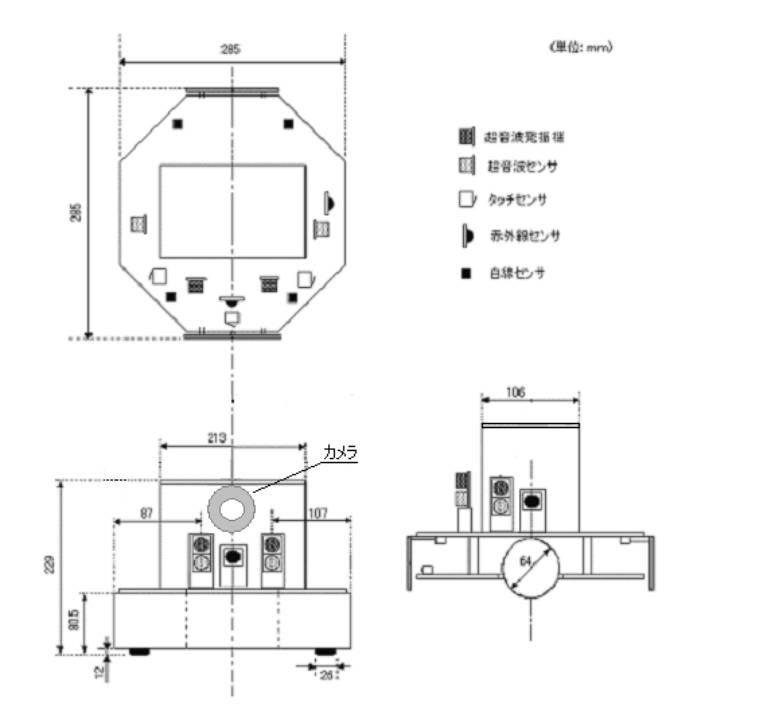
MIRS0503システムのハードウェアは標準MIRSに準ずる構成を有するが、MIRS0503固有の機能を実現するためにいくつかの変更点がある。
<赤外線センサ>
赤外線センサは、ポストのボタンから発信されている赤外線を感知するために使用する。
MIRSの前方のものは、ポストのボタンを押してポストを獲得できたかどうかを確認するためのもので、 MIRSの左側(このMIRSは時計回りにポストを回るので)のセンサは、ポストのボタンの位置を探すときに使用する。2個
<超音波センサ>
超音波センサはMIRSからポストまでの距離を測る。
標準MIRSと仕様はかわらない。4個
<白線センサ>
白線センサはMIRSが白線の外に出そうになったときにMIRSの制御を行う。
標準MIRSと仕様はかわらない。4個
<タッチセンサ>
標準MIRSと仕様はかわらない。3個
<カメラの搭載>
ポストにひかれているラインを読み取ることにより番号を確認するようにする。それを実現するためにカメラを搭載することにする。カメラから画像認識時に変化する波形を取り出し、1〜5本のライン数を判断することにする。NTSC信号を出力するCCDまたはC-MOSカメラを用いる。出力されたアナログ信号をA/Dコンバータによってデジタル信号に変換しそれにより、何番ポストかを認識する
<AD変換機(NTSCコンバータ)>
カメラから出力されるNTSC信号をデジタル信号に変換するためのボード。専用のボードを用意する。CPUボードのシリアルポートから入力する。
コンバータはマイコンにより実現する。まずNTSC信号をLPFによりなだらかにして、それをコンバータによりデジタル信号に変換してCPUボードに入力する。
3、
ソフトウェア
MIRS0503システムのハードウェアは標準MIRSに準ずる構成を有するが、MIRS0503固有の機能を実現するためにいくつかの変更点がある。
・ ラインの数を確認するためにカメラから受け取ったデジタル信号を1から5まで判別するプログラムを作成する。
・ ポスト獲得までの移動方法を変更する。
・ 白線を確認した場合の回避動作を加える。
・ ポスト獲得数を5個に対応できるように変更する。
・ 超音波センサで前方にポストがない位置を検知するプログラムを作成。
・ ポスト判別時はカメラモジュールに移行し、MIRS動作とは独立したプログラムにする。
・ 復路の場合ではREの値は多少のずれがあるので、記憶した値の地点の前後を移動しポストを探索するようなプログラムを加える。
主なプログラムの流れ(1周目)
- 初期(スタート)位置から白線まで移動、左へ旋回し白線上に平行に停止。
- 停止位置から右に超音波を出しながら、白線上を移動しポストのないラインを探索する。
- ラインを見つけたら、そのライン上を左右に超音波を出しながら直進移動。
- ポストを発見したらREの移動量を記録し、旋回して接近する。
- ポスト番号を判別できる位置まできたら、カメラを作動する別のプログラムへ飛ぶ
- プログラムが返した値を記録し、ポストを獲得するプログラムへ。
- 順番どおりなら獲得。異なる場合は、REの移動量と返した値をセットで記憶する。(返す値はポスト番号に対応する)
- 次のポストへ移動し同様の動作を行う
- 反対側の白線まで到達したら、左右に超音波を出しながら後進移動。
- 今度はポストの位置を記憶しているので、順番どおりに獲得する。
(2周目)
1. 初期位置から1周目に原点と定めた場所に移動。
2. 1周目に記憶した番号順にポストの座標に移動。
3.
ポストを時間内に獲得していく。
4.
すべてのポストを獲得して終了。
基本設計におけるフローチャート
・ ポスト探索モード
4、外観
1、
ハードウェア
カメラを設置する。ADコンバータをつくり実現する。
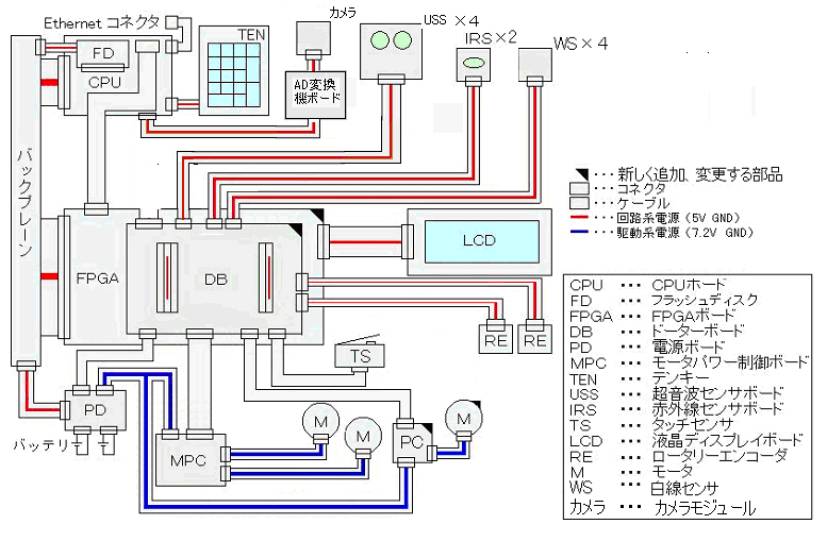
l ドータボードとFPGAボード
l カメラモジュール
カメラモジュールからはNTSC信号が出力される。それをNTSCコンバータを介してデジタル信号に変換してCPUボードに入力する。
DBとは別に変換機を作成する。
電源は足回りを駆動する電源と同じものを使う。
その他は標準機と同じ
4、実現方法
1、
ハードウェア
カメラによってポストのラインを認識する。
MIRS競技規定に沿うように、カメラを搭載する。
カメラの信号変換機はDBには含めずに別につくる。
2、
ソフトウェア
・ MIRS前方に搭載するカメラにより、ポスト番号を判別するプログラムを作成する。
・ MIRSの移動方法を変更する。
競技開始直後、超音波センサによってポストの有無の確認を行う。そしてポストがない位置(直線)を検知する。
・ 白線を確認した場合の回避動作を加える。
白線を感知した場合、後退し、直線上に戻る。
・5個のポストを獲得できるようにする。
・
標準機のポスト座標を記憶するようにする。
直線上を進行中に左右にポストがあった場合、そのポストに移動しそのポスト番号と座標(REによる)を記憶できるようにする
・ カメラからの信号は8ビットのデジタル信号に変換されたものをFPGAボードから受け取るので、それを受け取るためのデバイスドライバを作成する。