|
������ �d�q����H�w��
|
|
|
MIRS0503�V�X�e����ď�
|
|
|
MIRS0503-DSGN-0001
|
|
|
�����L�^
|
|
�Ő�
|
�쐬��
|
�쐬��
|
���F
|
�������e
|
|
A01
|
2005.7.20
|
�g���J
|
�g���J
|
����
|
|
A02
|
2005.9.2
|
�g���J
|
�g���J
|
����
|
|
A03
|
2005.10.21
|
�g���J
|
�g���J
|
�P���ڂ̓���T�v�����
|
�ڎ�
�T�D�ړI
�U�DMIRS0503�V�X�e��������
1.�@�|�X�g���ʂɂ���
2.�@���W�L���ɂ���
3.�@�����g�Z���T�ɂ���
�V�D����T�v
1.�@1���ڂ̓���
2.�@2���ڂ̓���
3.�@�V�X�e���O�ϐ}
�ړI
�{������MIRS0503�̃V�X�e�������ɂ��Ă܂Ƃ߂����̂ł���B
����Ɋ�Â���MIRS�J����i�߂邱�Ƃ�ړI�Ƃ���B
MIRS0503�V�X�e��������
1.
�|�X�g���ʂɂ���
�}1��2005�N�x�d�l�̃|�X�g�}�ł���B���܂ł̃|�X�g�ƈقȂ�A�|�X�g�ʂ�����@�Ƃ��ĐԊO���Z���T�iIRS�j�ȊO�ɁA�ԊO��LED�㕔�ɂ���5�{�̐��ɂ��|�X�g�ԍ����ʂ��\�ɂȂ����B���ꂩ��A�|�X�g���ʂ̕��@�Ƃ���5�{�̐���p�������Ǝv���B
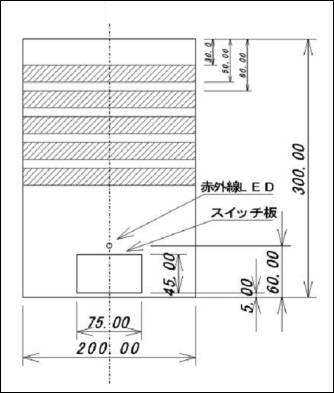
�}1�@2005�N�x�d�l�|�X�g�}
·
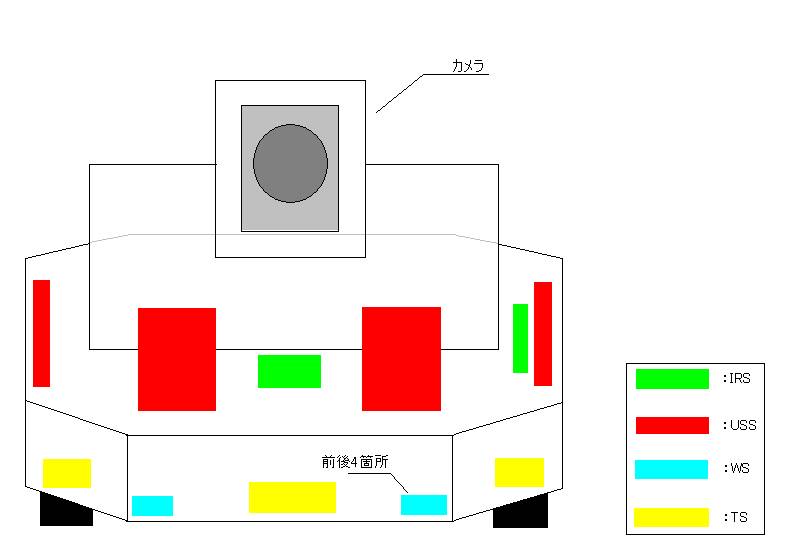
���@
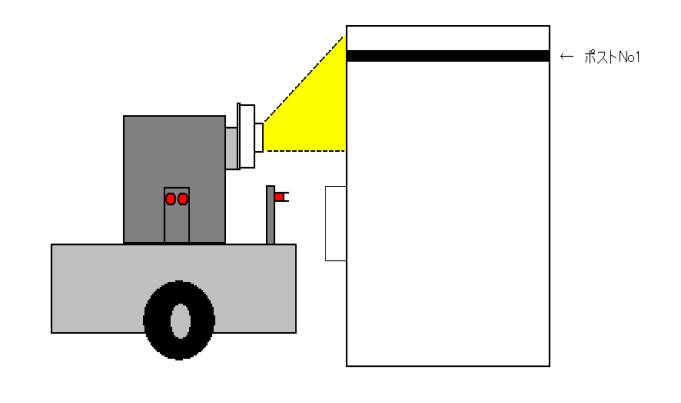
�}2 �@
�}2�Ɏ����悤��MIRS�O���ɃJ���������t�����̉摜����|�X�g�ԍ��ʂ���B
·
���_
���̂��ƂŁA�|�X�g���ʂ̎��Ԃ��������邱�Ƃ��ł���B�Ⴆ�A�|�X�g�ԍ����l�����ׂ��ԍ��łȂ������Ɖ��肷��Ƃ��A�ȉ��̂悤�ɂȂ�B
���܂ł̃|�X�g���ʌo��
�@.�|�X�g����
�A.�ʒu����A�|�X�g�ʒu�܂ňړ�
�B.�|�X�g���������^��
�C.IRS�ɂ��|�X�g�ԍ�����
�D.�ԍ����قȂ��Ă����̂Ŏ���^���Ɉړ�
�E.���̈ʒu�ɂ܂ňړ�
�F.�ʂ̃|�X�g��T��
����̃|�X�g���ʌo�߁i��j
�@.�|�X�g����
�A.�ʒu����A�|�X�g�ʒu�܂ňړ�
�B.�|�X�g�ԍ�����
�C.�ԍ����قȂ��Ă����̂Ō��̈ʒu�Ɉړ�
�ȏ�̂��Ƃ��A�|�X�g���ʂɗp�������Ǝv���B
����T�v
MIRS�̃|�X�g�l����������̂悤�ȋ��Z��ōs���Ƃ���B
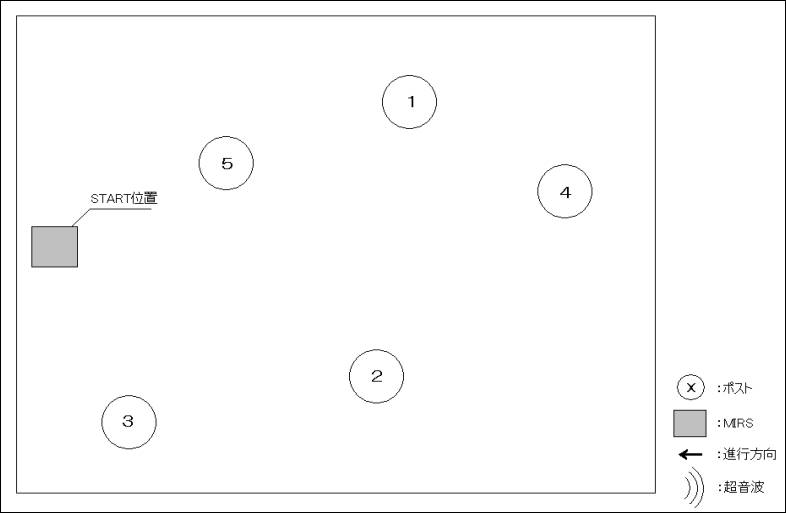
�}3�@���Z��z��}�i����T�v�Łj
MIRS�̃|�X�g�l������͎��̂Ƃ���ł���B
·
1���ڂ̓���ɂ���
�}�S�@�@�ɂ���
MIRS���X�^�[�g�ʒu�ɃZ�b�g���A�X�^�[�g������90����]�������܂ňړ��B
���̌�A�O��Ɉړ����Ȃ��璴���g�Z���T�Ń|�X�g���Ȃ��ʒu�������B
�������A��Q���i�|�X�g�j���Ȃ��ʒu�����m�����炻�̈ʒu�����_�i0,0�j�Ƃ��ċL���B
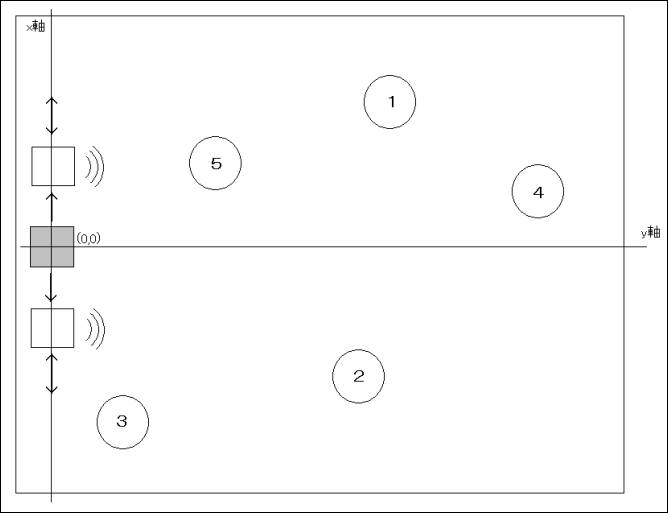
�}4�@�@
�}�T�@�A�ɂ���
���_���߂���AMIRS���猩���Ɖ��肵���Ƃ��̋��Z��̍��E��x���E�O���y���ƒ�߂�B
�����ݒ�ł�����AMIRS��y�������ɒ��i�Ex�������ɒ����g�M���Ă����B
�����āA�����g�Ń|�X�g�����m����B

�}5�@�A
�}�U�@�B�ɂ���
�|�X�g�����m������AMIRS��90����]���āA�|�X�g�ɑ��Đ��ʂ������悤�ɂ���B
���̈ʒu��MIRS�͍��W�Ƃ��ċL������B
���̌�A�O�ʂɎ��t���Ă��钴���g�Z���T�ŕ�������Ȃ��璼�i���Ă����B
�����āA�|�X�g�ɋ߂Â�����|�X�g�ɑ��Ď���^�����s���O�ɁA�|�X�g�ԍ��ʂ���B
����̏ꍇ�A�|�X�g�ԍ��͂R�Ȃ̂Ń|�X�g�ԍ����L������B
���̌�A���̃|�X�g�̔ԍ��͂R�����A�P���ڂ̓|�X�g�̔ԍ��ɊW�Ȃ������������Ƀ|�X�g���l�����Ă����B
MIRS�̓|�X�g������^�����ă|�X�g���l�����āAy���ɖ߂�B
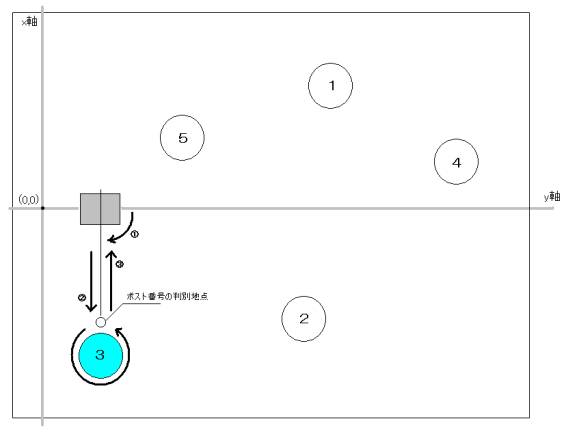
�}6�@�B
�}�V�@�C�ɂ���
���̌�̓|�X�g��y����̍��W�Ɣԍ����L�����Ȃ���|�X�g���l�����Ă���
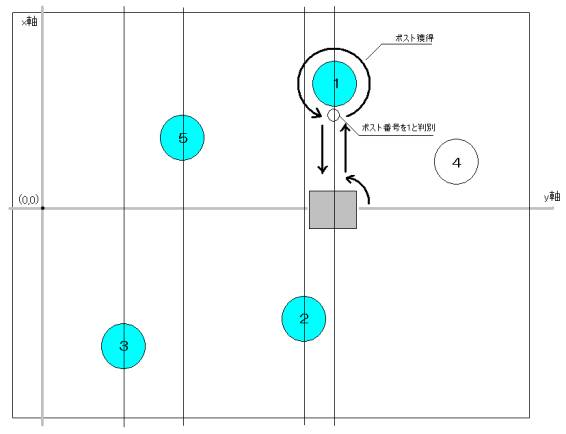
�}7�@�C
�}�X�@�E�ɂ���
�|�X�g�����Z��Ŏg�p�����|�X�g���l������܂ŌJ��Ԃ��B
�Ō�̃|�X�g���l��������A���_�ɖ߂��Ē�~����B
�i�ꍇ�ɂ���ẮA�|�X�g�T���l�������Ɠ����ɒ�~����悤�ȃv���O�����ɂ��邩������Ȃ��B�j
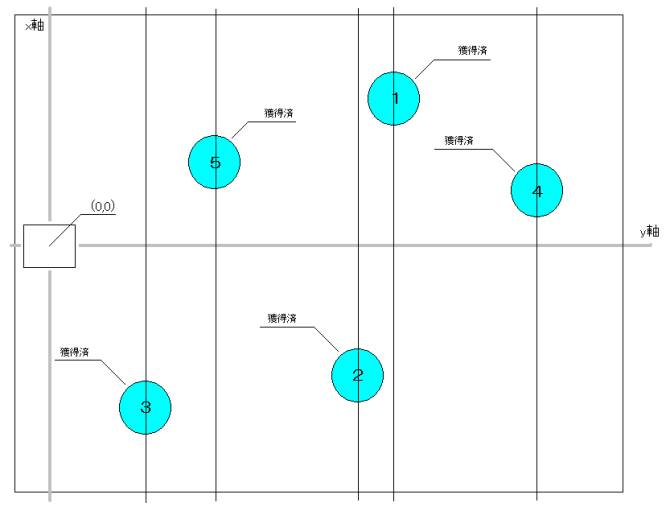
�}9�@�E
·
2���ڂ̓���ɂ���
2���ڂ̓���́A1���ڂ̓���̍ۂɂ��ׂẴ|�X�g�ʒu�i���W�j���L�����Ă���̂ŁA����𗘗p���͂��߂���|�X�g�P�̈ʒu�܂ňړ����|�X�g���l������B
���̌�́A�L�����Ă�����W�ʂ�Ƀ|�X�g�����Ɋl�����Ă����悤�Ȍ`�ɂȂ�B
�V�X�e���O�ς͎��̂Ƃ���ł���B
�}10�@�V�X�e���O�ϗ\�z�}
�֘A����
·
�Z�p������