|
������ �d�q����H�w�� |
||||||||
|
||||||||
|
�����L�^ |
||||||||
|
�Ő� |
�쐬�� |
�쐬�� |
���F |
�������e |
||||
|
A07 |
2005.9.9 |
�c�� |
�V�� |
���� |
||||
|
B07 |
2005.9.9 |
�c�� |
�V�� |
�G���L�A�\�t�g�̕��͂̒NjL�@�t���[�`���[�g�A�O�ϐ}�̕ύX�@�ڍא}�̒NjL |
||||
|
C07 |
2005.9.13 |
�c�� |
�V�� |
���J�̕��͂̒NjL�A�\�t�g�E�F�A�̕��͂������A |
||||
�V�X�e����{�v��
��{�I�ɂ��V�X�e������ď��Ɋ�Â��悤�ɂ���B
��
���J�j�N�X
�W��MIRS����ՂƂ��Ĉȉ��̉��ǂ��s���B
1.
�|�X�g���ʕ�������
�@
�d�l
ws�i�z���C�g�Z���T�j���S�c�ɕ��ׁA���ꂼ���ws���A�|�X�g�̃��C���̂Q�`�T�{�ڂɍ��������킹�Ă����B
�^�b�`�Z���T�ƃo���p���P�g�Ƃ����B�܂��A���̃^�b�`�Z���T���Aws�̔������₷�������ł�����悤�Ȉʒu�Ɏ��t����B
�A
����
(A)�|�X�g�ɐڐG�����Ƃ��Ɉꕔ�ɏՌ����W�����Ȃ��悤�ɂ���
(B)�^�b�`�Z���T�̈ʒu��������ł���悤�ȋ@�\�ɂ���
(C)�eWS�̓X�y�[�T�[�Œ��߂���
(D)�SWS��1�x�ɔ������ł���@�\�ɂ���
2.���̑��̕ύX�_
�E�E���ʂ�USS�����t����
�E�O�ʂ�TS�ƃo���p�����O���A�㕔��IRS��TS�ƃo���p�����t����
�ELCD�{�[�h���㕔�ɐݒu����B
MIRS�O�ϐ}
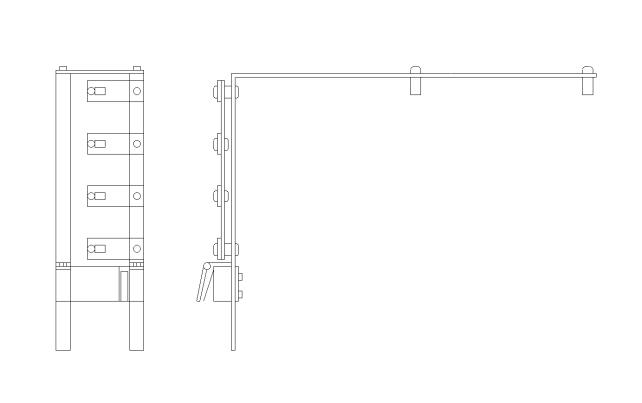
�@�ڍא}
��
�G���N�g���j�N�X
���@��H�\��
�@��-1�@��H�\���}
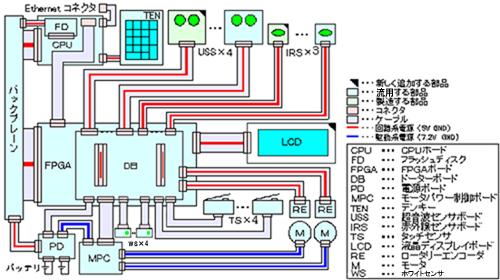
�}�P�F��H�\���}
��-2�@��H���i�@�\���\�T��
MIRS�ɂ������H���i�̋@�\���\�T�����ȉ��ɋL���B
�E�V�X�e���̊�{�����Ƃ���PC/AT�݊��̃p�[�\�i���R���s���[�^���g�p����B
�E�o�b�N�v���[���Ƃ��ĂS�X���b�g��ISA�o�X���g�p����B
�E�C�[�T�l�b�g�P�[�u�����g�p���ăl�b�g���[�N�ɐڑ����邱�Ƃ��ł���B
�EMIRS�ŗL�̓��o�͋@�\�̐����FPGA�{�[�h�ƃh�[�^�[�{�[�h�ɂ���Ď�������B
�EMIRS�Ŏg�p����S�\�t�g�E�F�A�A�y��FPGA�{�[�h�̉�H���͑S�ăt���b�V���f�B�X�N�ɕۑ�����B
�E�Z���T�@�\�Ƃ���4�̃^�b�`�Z���T�A3�̐ԊO���Z���T�A�S�̒����g�Z���T�A�Q�̃��[�^���[�G���R�[�_��L����B
�E�}���}�V���C���^�[�t�F�[�X�̓��͑��u�Ƃ��ăe���L�[�A�o�͑��u�Ƃ��ĉt���f�B�X�v���C��L����B
�E�쓮�n�̑��x�����PWM����ɂ���čs���B
�E�d���Ƃ���7.2V�j�b�J�h�[�d�d�r�Q���g�p���A���̓��̂ЂƂ�+5V�ɕϊ����Ă����H�n�d���Ƃ��ēd�q��H���ɋ������A�����ЂƂ͋쓮�n�d���Ƃ���7.2V�̂܂܋ً}��~�@�\����ă��[�^�ɋ�������
��-3�@�W��MIRS���痬�p�������
l
�����g�Z���T�{�[�h�~4
l
IR�Z���T�{�[�h�~3
l
WS�Z���T�~4
l
�^�b�`�Z���T�~4
l
���[�^���[�G���R�[�_�~2
l
���[�^�~2
l
MPC�{�[�h
l
CPU�{�[�h
l
�t���b�V���f�B�X�N
l
FPGA�{�[�h
l
�d���{�[�h
l
�e���L�[
l
�h�[�^�[�{�[�h
l
�t���f�B�X�v���C�{�[�h(LCD)
�@�@�@�@�@�@�@���ꂼ��̃{�[�h�̎d�l���G���N�g���j�N�X�ڍאv���e���v���[�g(MIRSATLM-REGU-1005)���Q�ƁB
��
�\�t�g�E�F�A
MIRS0502�̃\�t�g�E�F�A�͊�{�I��MIRS�W���@�̃v���O�����ɏ�����B�������A�ȉ��̂悤�Ȋg���E�lj����s���B
�g���E�lj����ڂ̏ڍ�
1.�|�X�g�l�����̕ύX
�K��̃|�X�g���ɒB����܂ŒT���E�l������𑱂���B
2.��|�X�g����ъ�_�ݒ蓮��
���Z�G���A�̒��S�ʼn�]���ă|�X�g��T�����A��ԋ߂��|�X�g�ֈړ����Ă��̃|�X�g����|�X�g�Ƃ���B���̌�A��|�X�g�ɑ��ĐԊO�����M�@�i�X�C�b�`�j�̂Ƃ���܂Ŏ���^�������A��������_�Ƃ��Đݒ肷�铮��v���O�����B
3.���S�ֈړ�����ۂ̊�|�X�g�l������
�����ʒu���璆�S�ֈړ�����ۂɁA�ړ����铹��Ƀ|�X�g�����݂���ꍇ�A���̃|�X�g�̎����Ɉړ����A���̃|�X�g����|�X�g�Ƃ��铮��v���O�����B
4.�|�X�g�T������
��|�X�g�ɑ��Ď���^�������Ȃ���A���ʂ̒����g�Z���T�Ń|�X�g��T�����铮��v���O�����B
5.�|�X�g���ʓ���
��|�X�g���甭�������|�X�g�ֈړ����A���ʂ̔����Z���T��p���ă|�X�g�̃��C����ǂݎ��A�l������|�X�g���ǂ����ʂ��铮��v���O�����B�����Z���T�S�̏o�͂���������{�ڂ܂ł��邩�f���A�|�X�g�ԍ��ʂ���B���ʌ�A�l������|�X�g�Ȃ�l������Ɉڍs���A�����łȂ���o�b�N���Ċ�|�X�g�̎����ɕ��A����B
6.�|�X�g�l������
�|�X�g�̃X�C�b�`�ɑ̓��肷��ۂɁA�������ɂԂ���A���̐ԊO���Z���T�ŃX�C�b�`�������ꂽ�i�ԊO�����M���Ƃ܂����j���Ƃ��m�F����悤�ɕW���@�̊l������v���O������ύX����B�i�l������͊�{�I�ɕW���@�Ɠ����v���O������p����j
7.�@2��ڂ̓���
�@��|�X�g�̊�_���牽�x������ǂꂭ�炢�̋����ɉ��Ԃ̃|�X�g�����邩���L�^���A���Z�Q��ڂɂ͂��߂��珇�Ƀ|�X�g���l���ł���悤�ɂ���B
���L�^���Ă����f�[�^[��|�X�g�̊�_����̊p�x,����,�|�X�g�ԍ�]
8.�����ł��Ȃ��|�X�g�ԍ�����
�@��ʂ�̒T�������Ă������ł��Ȃ��ԍ�������Ƃ��A���̔ԍ��̏��Ԃ����Ċl�����Ă����B���Ƃ��A�Q�Ԃ̃|�X�g�������ł��Ȃ��Ƃ��A�P���R���S����@�̏��Ń|�X�g���l������B
9.�s�K�v�ȃv���O�������폜
���Ɏ����gMIRS�W���@���痬�p������h�Ɋ܂܂�Ȃ������폜����.
�t���[�`���[�g
�i���j�{��2��ڂ�A�͏ȗ�����B��
MIRS�W���@���痬�p�����
�E�s������n���W���[��
�E�쓮�n���W���[��
void pwm_enco_start(int
period)
void pwm_enco_stop(void)
void pwm_enco_restart(void)
void encoder_data(float *l_distance, float
*r_distance, float *l_speed, float *r_speed, int
*br)
void encoder_data2(float *l_angle, float
*r_angle, int *br)
void encoder_data3(float *l_angle, float
*r_angle, int *br)
void pwm_both_data(int l_duty, int r_duty)
void pwm_straight(int l_distance, int
r_distance)
void pwm_rotate(int angle)
void pwm_lqr_straight(int distance, int time)
void pwm_lqr_rotate(int angle, int time)
void pwm_lqr_circle(int radius, int angle, int time)
int lqr_straight(int distance, int time)
int lqr_rotate(int angle, int time)
int lqr_circle(int radius, int angle, int time)
�E�X���b�h�n���W���[��
void *irs_ts_ws(void *t)
void *encoder(void *t)
void *uss_read(void *t)
void *uss_read2(void *t)
���e�Z���T�[�Ɋւ��郂�W���[���E���͕W���@�̂��̂𗬗p����B
�V���ɍ쐬�����
�E ��_�ݒ��
�@�͂��߂Ɋ�|�X�g�ɐڋ߂����Ƃ��A�ԊO�����M���̈ʒu�܂Ŏ���ړ����A
��������_�Ƃ��ċL������B
�E �|�X�g�T�����Q
�@��|�X�g�̎�����ړ����Ȃ���A���̃|�X�g��T������B
�E �|�X�g�ԍ��m�F��
�@�|�X�g���ʕ��̃^�b�`�Z���T����������܂Ń|�X�g�ɐڋ߂��āA�O����WS�ɂ���ă|�X�g�̃��C����ǂݎ��A
�|�X�g�ԍ���ǂݎ��B
�E �l�����ׂ��|�X�g�ֈړ���
�L�^�����|�X�g�̃f�[�^�����ƂɁA�l�����ׂ��|�X�g�̊p�x��������|�X�g������B�O���̒����g�Z���T��p���āA���̏ꂩ��E90���t�߂ŁA���l�����ׂ��|�X�g�̋����ƁA�قړ������炢�̋����ɂ���|�X�g��������܂ł��̏�ʼn�]����i�p�x�E�����̋��e�덷�A�ő��]���̓v���O������Œ�`����j�B�������炻�̃|�X�g�֑O�i����i�������Ȃ��ꍇ�͂��̃|�X�g���Ƃ��j�B���߂�ꂽ�����łƂ܂�B
�E �ʒu���
�@�Ƃ�ׂ��|�X�g��������ŁA��|�X�g�ƌ��݂̈ʒu�Ƃ̂�����C������悤�Ɋ�|�X�g�ɖ߂�B
�E
�t�F�C���Z�[�t��
�G���[���N�������Ƃ��ɁA��ԋ߂��|�X�g�Ɉړ����l������B���̌�A���̃|�X�g�����Ȃ��瑼�̃|�X�g��T���A�������炷���Ɋl�����ɂ����B