|
沼津高専 電子制御工学科 |
||||||||
|
||||||||
|
改訂記録 |
||||||||
|
版数 |
作成日 |
作成者 |
承認 |
改訂内容 |
||||
|
A04 |
2005.7.22 |
田中 |
天野 |
初版 |
||||
1.
目的
今後MIRSを改良していく上で、その改良の基本とするため。また、今後のMIRS0502の改良方針を報告するため。
2.
システムの特徴
設計ポリシー
1.
ハードウェアは改造しすぎると構成が複雑になり、バグを起こしやすくなったり、バグが見つけにくくなったりすると予想されるので、シンプルな改良とする。かわりに今までのハードウェアをより完璧なものにする。
2.
ソフトウェア、ハードウェア共、今までにない独創的な改良を行い、例年に比べ、より効率的な方法で全ポストを獲得することを目指す。
3.
今年度新たに導入されたポストのラインをうまく利用し、効率アップを目指す。
動作の特徴
ポストの周りを周回しなくても、ポストに近づいていき、tsが反応した(ポストに接触した)時点で、4つのwsの出力を記録する。次のようなデータが得られるはずだ。これにより、番号が一発でわかる。
|
ポスト番号 |
データ(上位ビットが一番上のws) |
|
1 |
1111 |
|
2 |
0111 |
|
3 |
0011 |
|
4 |
0001 |
|
5 |
0000 |
3.
基本構成
 使用するセンサ
使用するセンサ
赤 : 赤外線センサ (irs) 2個
青 : 超音波センサ (uss) 4個
黄緑 : タッチセンサ (ts) 4個
白 : ホワイトセンサ (ws) 4個
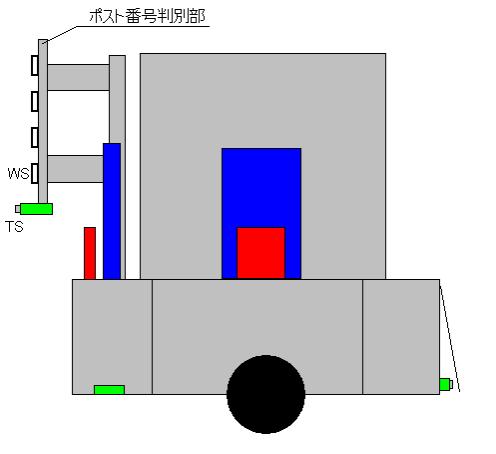
なお図1では図2にあるポスト番号判別部は省略してある。
図1 平面図
ハードウェアの特徴
標準MIRSからの改良点を以下に示す。
・ 標準では前面についていたtsを後方に装備
・ 右側にもussを装備
・ ポスト番号判別部を新装備
以上、すべて標準のものを使用する。
ポスト番号判別部
従来の方法では、赤外線センサでコードを判別するために赤外線送信部に対して正対する必要があったが、今回のルール改定によりポストにテープが巻かれることとなった。これを利用してポスト番号をどこからでも接触しても取得できるようになり、その分の時間短縮が行え、さらに、周回して生じる誤差が出ないのでは、と考えたからである。
図2 側面図 wsを4つ縦に並べ、それぞれのwsを上から、ポストのラインの2〜5本目に高さを合わせておく。
4.
動作概要
1.
前進して中心へ行く(途中でポストがあれば3へ)。
2.
1番近いポストへ行く。
3.
そのポストを基準ポストとし、赤外線LEDと正対するまで回る。
4.
赤外線LEDの位置を0°とし、基準ポストの周りを回りながら、右側のussで周りのポストを探す。
5.
発見次第、そのポストの近くに行く。
6.
ポスト番号判別動作を行う。
7.
獲得すべきポストなら周回し獲得、基準ポストに戻る。違えば周回せずに基準ポストまで戻る。
8.
再び基準ポストを周回する。
9.
7と8を繰り返す。
10.
1周して、ポストの角度と番号を記憶しているので(距離も記憶させるかも)、順番を決め全てのポストをとりに行く。
5.
システム外観(イメージ)
図1、2参照