- 一周目の競技において、ポストの位置、順番を正確に確認できる。
- 二周目の競技において、早く正確に順番通りにポストの獲得を行える。
- mirs標準機において考えられる問題点を改善し、精度の高い動作を目指す。
- スタート地点を原点として、MIRSがポストをすべて見渡せるところまで移動しその地点の座標データを保存する。
- その場で回転しながらポストを探索し、ポストの座標を保存する。
- そしてその地点を中心位置とし、中心位置から一番近いポストへ移動する。
- 移動したらコードを確認し1ならば獲得する。違うのならばコードと位置を覚えておく。
- 次に原点から二番目に近いポストに移動し、コードが順番どおりなら獲得し、違うのならばコードと位置を覚えておく。
- 同様にしてすべてのポストのコードを確認したら原点に戻る。
- 1周目の1で保存した座標データを用いて中心位置まで移動する。
- 1周目のポスト探索で保存した各ポストの座標とコードを用いて、とるべきコードのポストへ直接移動する。
- ポスト獲得後に次のとるべきコードのポストへ移動して獲得する動作を繰り返していく。
| 1周目 | |
| 2周目 |
尚、詳しい動作についてはシステム提案書に記載してある。
-
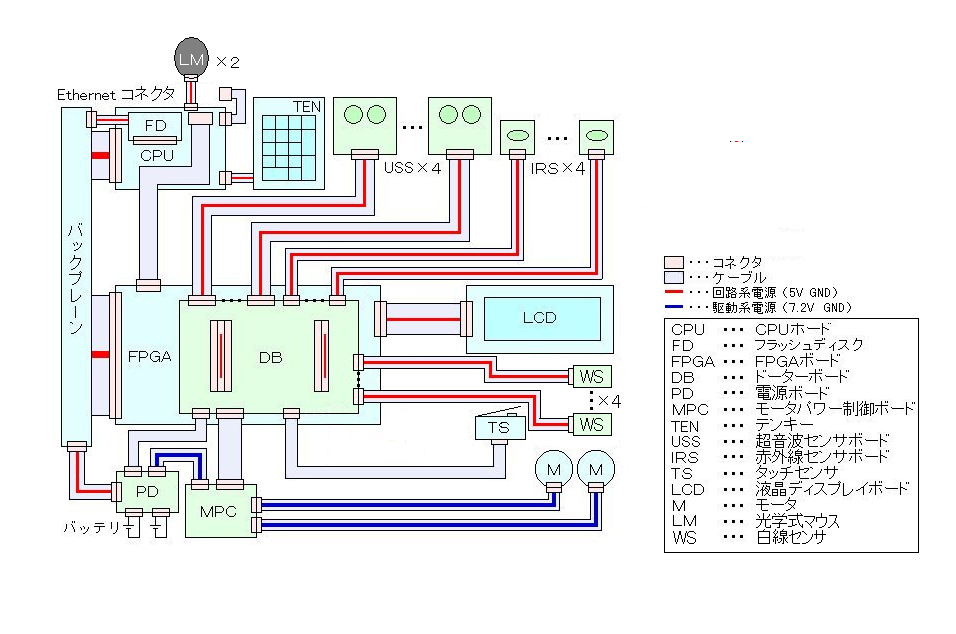
標準機との変更点
- タッチセンサを前方の一つだけ使用しシングルバンパーに変更
-
ケーブルをコンパクトにまとめることが可能
動作負担の減小
- 光学式マウスを使用。(ロータリーエンコーダは不使用)
-
光学式マウスを二つ使うことによりMIRS、ポストの座標を正確に取ることが可能
-
カーネルモジュール、デバイスドライバなどの構成に関しては標準機からの変更点はないが、光学式マウス使用によりそれに関するデバイスドライバを新しく組み込む必要がある。
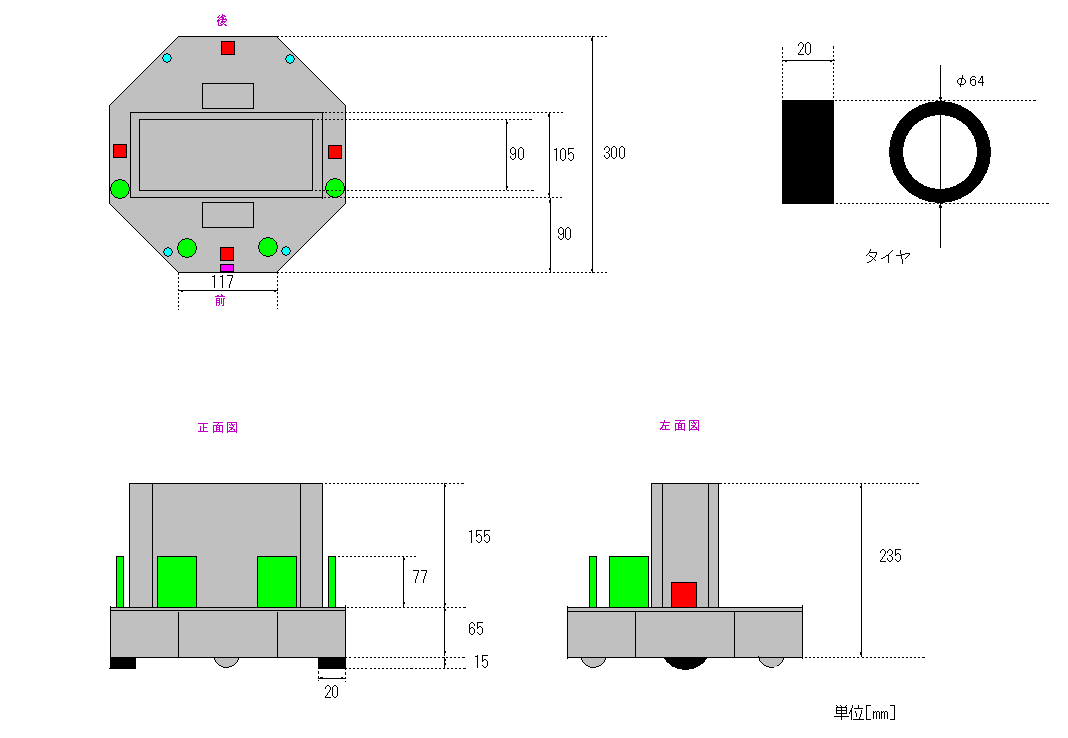
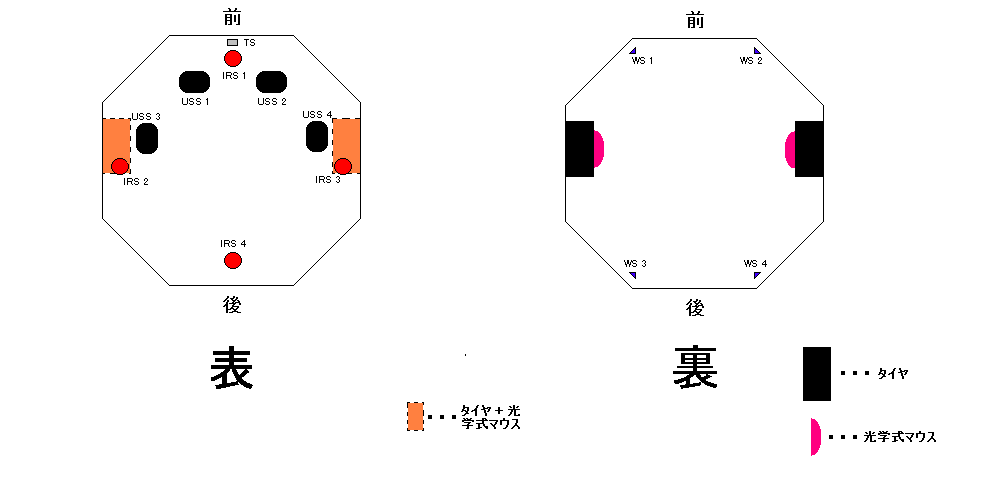
- 図1に本システムの外観、図2にセンサの配置を示す。
 |
 |