MIRS0403 僜僼僩僂僃傾徻嵶愝寁彂 |
斣崋 |
MIRS0403-SOFT-0001 |
斉 悢
|
嵟廔峏怴擔
|
嶌 惉
|
彸 擣
|
夵 掶 婰 帠
|
A01
|
2004.9.21
|
楅栘姲棦
|
忋墍棽暥
|
弶 斉
|
A02
|
2004.10.1
|
搉绯恀栫
|
忋墍棽暥
|
儌乕僪慗堏昞偺偮偗偨偟
|
A02
|
2004.10.8
|
幠揷棿帯
|
楅栘姲棦
|
僼儘乕僠儍乕僩偺彂偒姺偊
|
栚師
- 偼偠傔偵
- 摦嶌儌乕僪偺掕媊
- 儌乕僪偺僼儘乕僠儍乕僩
- 儌乕僪慗堏昞
- 儌僕儏乕儖
杮僪僉儏儊儞僩偼丄MIRS0403 婎杮愝寁彂偵婯掕偝傟偨僔僗僥儉偺摦嶌婯掕丄忬懺慗堏傪幚尰偡傞奺僞僗僋偺奐敪(僐乕僨傿儞僌丄帋尡摍)偵昁梫側帠崁傪弎傋傞
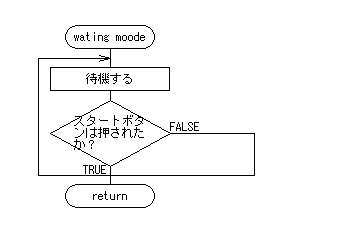
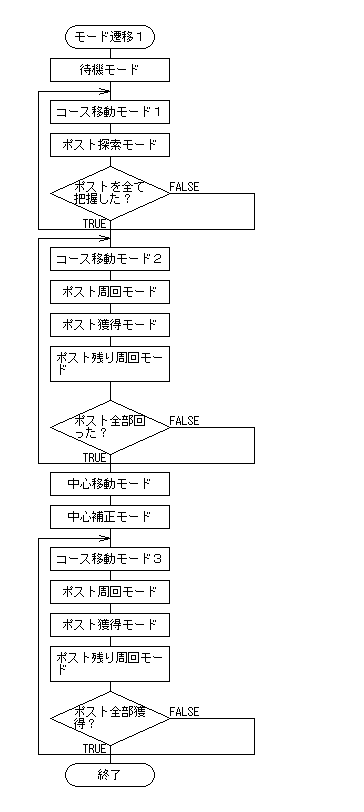
- 懸婡儌乕僪
儊僀儞僾儘僌儔儉傪棫偪忋偘傞丅嫞媄偑巒傑傞乮僗僞乕僩僗僀僢僠偑墴偝傟傞乯傑偱丄懸婡忬懺傪懕偗傞丅
丒慗堏忦審
嫞媄侾夞栚仺僐乕僗堏摦儌乕僪侾
嫞媄俀夞栚仺拞怱堏摦儌乕僪
丒僼儘乕僠儍乕僩
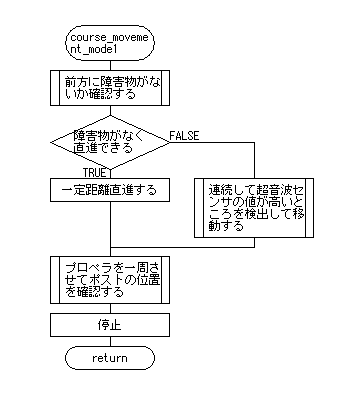
- 僐乕僗堏摦儌乕僪侾
崱偄傞埵抲偐傜挻壒攇僙儞僒傪巊偭偰捈恑偱偒傞儖乕僩傪扵偟丄堦掕嫍棧恑傫偩屻億僗僩傪扵嶕偡傞丅
丒慗堏忦審
堏摦廔椆仺億僗僩専嶕儌乕僪
敀慄姶抦仺敀慄姶抦儌乕僪
丒僼儘乕僠儍乕僩
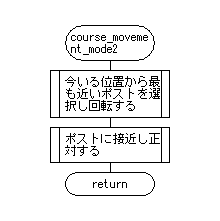
- 僐乕僗堏摦儌乕僪俀
崱偄傞埵抲偐傜嵟傕嬤偄埵抲偵偁傞億僗僩傪慖戰偟丄偦偺億僗僩偵嬤偯偔丅億僗僩偵嬤偯偄偨傜丄挻壒攇僙儞僒傪梡偄偰丄億僗僩偵懳偟偰俵俬俼俽偑悅捈偵側傞傛偆偵偡傞丏
丒慗堏忦審
峴摦廔椆仺億僗僩廃夞儌乕僪
敀慄姶抦仺敀慄姶抦儌乕僪
丒僼儘乕僠儍乕僩
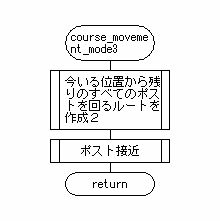
- 僐乕僗堏摦儌乕僪俁
俵俬俼俽偑拞怱埵抲偵偄傞応崌偵偍偄偰丄師偵妉傞傋偒億僗僩傪慖戰偟堏摦偡傞丅億僗僩偵嬤偯偄偩傜丄挻壒攇僙儞僒傪梡偄偰丄億僗僩偵懳偟偰俵俬俼俽偑悅捈偵側傞傛偆偵偡傞丏
丒慗堏忦審
峴摦廔椆仺億僗僩廃夞儌乕僪
敀慄姶抦仺敀慄姶抦儌乕僪
丒僼儘乕僠儍乕僩
- 億僗僩扵嶕儌乕僪
僗僥僢僺儞僌儌乕僞乕傪夞揮偝偣偰挻壒攇僙儞僒乕傪堦廃偝偣丄億僗僩偺嬌嵗昗宯僨乕僞傪偲傞丅
丒慗堏忦審
嫞媄応偺慡偰偺億僗僩傪攃埇仺僐乕僗堏摦儌乕僪俀
嫞媄応偺慡偰偺億僗僩傪攃埇偱偒側偄仺僐乕僗堏摦儌乕僪侾
丒僼儘乕僠儍乕僩
- 億僗僩廃夞儌乕僪
俋侽搙偦偺応偱塃偵夞揮偟丄億僗僩傪廃夞偡傞丏侾廃偟偰傕愒奜慄偵斀墳偟側偄応崌偼嵟崅俁廃傑偱億僗僩傪夞傞丏
丒慗堏忦審
愒奜慄傪姶抦仺億僗僩妉摼儌乕僪
俁廃偟偰傕愒奜慄傪姶抦偱偒側偄仺僐乕僗堏摦儌乕僪俀乮嫞媄侾夞栚乯
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂仺僐乕僗堏摦儌乕僪俁乮嫞媄俀夞栚乯
敀慄姶抦仺敀慄姶抦儌乕僪
丒僼儘乕僠儍乕僩
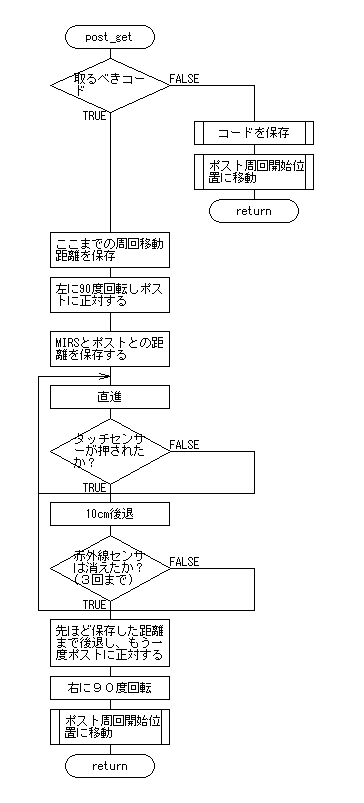
- 億僗僩妉摼儌乕僪
俵俬俼俽嵍懁偺愒奜慄僙儞僒偱億僗僩偺斣崋傪妋擣偡傞丅傕偟丄崱妉摼偡傋偒億僗僩側傜俋侽搙嵍偵夞揮偟億僗僩偵惓懳偟偨屻捈恑偡傞丅僞僢僠僙儞僒偑斀墳偟偨傜堦掕埵抲傑偱僶僢僋偡傞丅偦偺嵺偵丄傕偟愒奜慄偑傑偩徚偊偰側偐偭偨傜傕偆堦搙捈恑偟丄嵟崅俁夞傑偱摨偠偙偲傪孞傝曉偡丅愒奜慄偑徚偊偨傜尦偺埵抲傑偱僶僢僋偡傞丅
丒慗堏忦審
億僗僩妉摼仺億僗僩巆傝廃夞儌乕僪
億僗僩妉摼偱偒側偐偭偨仺億僗僩巆傝廃夞儌乕僪
敀慄姶抦仺敀慄姶抦儌乕僪
丒僼儘乕僠儍乕僩
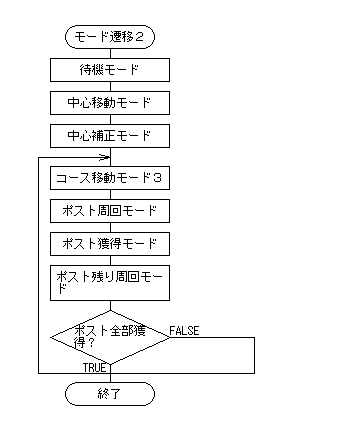
- 億僗僩巆傝廃夞儌乕僪
崱廃夞偟偰偄傞億僗僩偺拞怱嵗昗偲師偵愙嬤偡傋偒億僗僩偺拞怱嵗昗偐傜丄偦傟偧傟偺億僗僩偺拞怱嵗昗傪寢傇婳摴傪寁嶼丅偦偺婳摴忋偵峴偔偨傔偺丄億僗僩偺廃夞堏摦嫍棧傪寁嶼偟丄億僗僩傪廃夞偡傞丅 偦偺嵺億僗僩傪夞傞曽岦偼丄堏摦嫍棧偑傛傝抁偄傎偆偵偡傞丅偦傟偧傟偺億僗僩偺拞怱嵗昗傪寢傇婳摴忋偵棃偨傜丄塃懁偺挻壒攇僙儞僒乕傪梡偄偰丄師偵愙嬤偡傋偒億僗僩偵惓懳偡傞丅偙偺嵺偵峴偆惓懳曗惓偼丄尰嵼偺億僗僩偺廃夞婳摴忋偐傜奜傟側偄傛偆偵峴偆丅
丒慗堏忦審
栚揑抧摓拝仺僐乕僗堏摦儌乕僪俀丆俁丄拞怱堏摦儌乕僪乮嫞媄侾夞栚乯
栚揑抧摓拝仺拞怱堏摦儌乕僪丄僐乕僗堏摦儌乕僪俁乮嫞媄俀夞栚乯
敀慄姶抦仺敀慄姶抦儌乕僪
丒僼儘乕僠儍乕僩
- 拞怱堏摦儌乕僪
嫞媄侾夞栚偱嵟廔揑偵億僗僩偺嵗昗傪慡偰摼偨埵抲傑偱捈恑偡傞丅
丒慗堏忦審
堏摦拞偵慜曽偵億僗僩敪尒仺億僗僩巆傝廃夞儌乕僪
拞怱偵摓拝仺拞怱曗惓儌乕僪
敀慄姶抦仺敀慄姶抦儌乕僪
丒僼儘乕僠儍乕僩
- 拞怱曗惓儌乕僪
偦偺応偱夞揮偟丄億僗僩専嶕儌乕僪偱婰壇偟偰偍偄偨億僗僩嵗昗偲丄偄傑偺億僗僩偺嵗昗傪斾妑丅億僗僩専嶕儌乕僪偺偲偒偵偄偨埵抲傑偱捈恑偱偒傞傛偆偵夞揮偟偨屻丄捈恑偡傞丅
丒慗堏忦審
拞怱曗惓姰椆仺僐乕僗堏摦儌乕僪俁
敀慄姶抦仺敀慄姶抦儌乕僪
丒僼儘乕僠儍乕僩
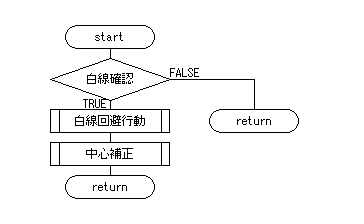
- 敀慄妋擣儌乕僪
敀慄傪姶抦偟偨傜婎弨揰乮嵟廔揑偵億僗僩偺嵗昗傪偡傋偰摼偨偲偙傠乯偵堏摦偡傞丅堏摦屻傕偲偺摦嶌偵栠傞丏
丒僼儘乕僠儍乕僩
丂丂丂丂丂丂丂嫞媄侾夞栚丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂嫞媄俀夞栚
乢慜
屻乢 |
懸婡儌乕僪 |
僐乕僗
堏摦儌乕僪侾 |
僐乕僗
堏摦儌乕僪俀 |
僐乕僗
堏摦儌乕僪俁 |
億僗僩
扵嶕儌乕僪 |
億僗僩
廃夞儌乕僪 |
億僗僩
妉摼儌乕僪 |
億僗僩巆傝
廃夞儌乕僪 |
拞怱堏摦
儌乕僪 |
拞怱曗惓
儌乕僪 |
敀慄姶抦
儌乕僪 |
懸婡
儌乕僪 |
- |
丂 |
丂 |
丂 |
丂 |
丂 |
丂 |
丂 |
丂 |
丂 |
丂 |
僐乕僗
堏摦儌乕僪侾 |
嫞媄堦夞栚 |
- |
丂 |
丂 |
慡偰偺億僗僩傪攃埇偱偒側偄 |
丂 |
丂 |
丂 |
丂 |
丂 |
丂 |
| 僐乕僗堏摦儌乕僪俀 |
丂 |
丂 |
- |
丂 |
慡偰偺億僗僩傪攃埇 |
愒奜慄姶抦晄壜(嫞媄堦夞栚乯 |
丂 |
栚揑抧摓拝乮堦夞栚偺傒乯 |
丂 |
丂 |
丂 |
| 僐乕僗堏摦儌乕僪俁 |
丂 |
丂 |
丂 |
- |
丂 |
愒奜慄姶抦晄壜乮嫞媄擇夞栚乯 |
丂 |
栚揑抧摓拝 |
丂 |
拞怱曗惓姰椆 |
丂 |
| 億僗僩扵嶕儌乕僪 |
丂 |
堏摦廔椆 |
丂 |
丂 |
- |
丂 |
丂 |
丂 |
丂 |
丂 |
丂 |
| 億僗僩廃夞儌乕僪 |
丂 |
丂 |
峴摦廔椆 |
峴摦廔椆 |
丂 |
- |
丂 |
丂 |
丂 |
丂 |
丂 |
| 億僗僩妉摼儌乕僪 |
丂 |
丂 |
丂 |
丂 |
丂 |
愒奜慄姶抦 |
- |
丂 |
丂 |
丂 |
丂 |
億僗僩巆傝
廃夞儌乕僪 |
丂 |
丂 |
丂 |
丂 |
丂 |
丂 |
億僗僩妉摼惉岟丄億僗僩妉摼幐攕 |
- |
堏摦拞慜曽偵億僗僩敪尒 |
丂 |
丂 |
拞怱堏摦
儌乕僪 |
嫞媄擇夞栚 |
丂 |
丂 |
丂 |
丂 |
丂 |
丂 |
栚揑抧摓拝 |
- |
丂 |
敀慄夞旔姰椆 |
拞怱曗惓
儌乕僪 |
丂 |
丂 |
丂 |
丂 |
丂 |
丂 |
丂 |
丂 |
拞怱偵摓拝 |
- |
丂 |
敀慄姶抦
儌乕僪 |
丂 |
敀慄姶抦 |
敀慄姶抦 |
敀慄姶抦 |
丂 |
敀慄姶抦 |
敀慄姶抦 |
敀慄姶抦 |
敀慄姶抦 |
敀慄姶抦 |
- |
-
拞怱堏摦儌僕儏乕儖
掕媊丗億僗僩埵抲忣曬傪尦偵婎弨揰傑偱栠傞
峔惉梫慺丗挻壒攇僙儞僒丄PWM/僄儞僐乕僟丄捈恑儌僕儏乕儖丄夞揮儌僕儏乕儖丄埵抲妋擣儌僕儏乕儖丄拞怱敾暿儌僕儏乕儖
娭悢柤丗center_move(void)
-
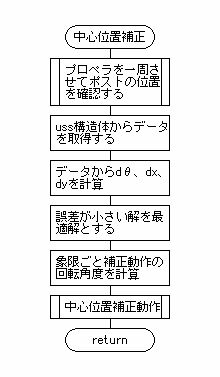
拞怱埵抲曗惓摦嶌儌僕儏乕儖
掕媊丗億僗僩埵抲忣曬傪尦偵婎弨揰傑偱栠傞
峔惉梫慺丗挻壒攇僙儞僒丄捈恑儌僕儏乕儖丄夞揮儌僕儏乕儖丄埵抲妋擣儌僕儏乕儖丄拞怱敾暿儌僕儏乕儖
娭悢柤丗correct_center(void)
-
楢懕偟偰挻壒攇僙儞僒偺抣偑崅偄偲偙傠傪専弌偟偰堏摦偡傞儌僕儏乕儖
掕媊丗億僗僩偑側偄応強傪専弌偟捈恑偡傞
峔惉梫慺丗挻壒攇僙儞僒丄捈恑儌僕儏乕儖丄夞揮儌僕儏乕儖丄拞怱敾暿儌僕儏乕儖
娭悢柤丗move1(void)
-
崱偄傞埵抲偐傜慡偰偺億僗僩傪夞傞儖乕僩傪嶌惉偡傞儌僕儏乕儖
掕媊丗摼偨億僗僩忣曬傪尦偵俵俬俼俽偵堦斣嬤偄億僗僩偐傜廃夞偡傞儖乕僩傪嶌惉偡傞
峔惉梫慺丗拞怱敾暿儌僕儏乕儖
娭悢柤丗root1(void)
-
億僗僩愙嬤儌僕儏乕儖
掕媊丗億僗僩偵愙嬤偡傞
峔惉梫慺丗挻壒攇僙儞僒丄捈恑儌僕儏乕儖丄拞怱敾暿儌僕儏乕儖丄栚昗億僗僩寛掕儌僕儏乕儖
娭悢柤丗post_approach(void)
-
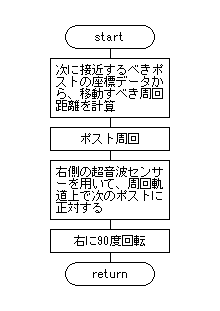
崱偄傞埵抲偐傜慡偰偺億僗僩傪夞傞儖乕僩傪嶌惉偡傞俀儌僕儏乕儖
掕媊丗億僗僩埵抲忣曬偲億僗僩僐乕僪忣曬傪尦偵僐乕僪偺弴斣偵儖乕僩傪嶌惉偡傞
峔惉梫慺丗拞怱敾暿儌僕儏乕儖
娭悢柤丗root2(void)
-
億僗僩偵惓懳偡傞傛偆妏搙曗惓儌僕儏乕儖
掕媊丗慜曽偺挻壒攇僙儞僒傪梡偄俵俬俼俽偑億僗僩偵惓懳偡傞傛偆偵偡傞
峔惉梫慺丗挻壒攇僙儞僒丄夞揮儌僕儏乕儖丄惓懳敾暿儌僕儏乕儖丄拞怱敾暿儌僕儏乕儖
娭悢柤丗correct_deg(void)
-
僐乕僪傪曐懚儌僕儏乕儖
掕媊丗億僗僩廃夞拞偵摼偨億僗僩僐乕僪傪曐懚偡傞
峔惉梫慺丗愒奜慄僙儞僒丄億僗僩斣崋敾暿儌僕儏乕儖丄拞怱敾暿儌僕儏乕儖
娭悢柤丗code_get(void)
-
億僗僩廃夞奐巒埵抲偵堏摦儌僕儏乕儖
掕媊丗億僗僩廃夞拞偵僐乕僪敾暿偺偨傔偵巭傑偭偨屻廃夞奐巒埵抲傑偱堏摦偡傞
峔惉梫慺丗PWM/僄儞僐乕僟丄夞揮儌僕儏乕儖丄拞怱敾暿儌僕儏乕儖丄億僗僩廃夞儌僕儏乕儖
娭悢柤丗post_turn(void)
-
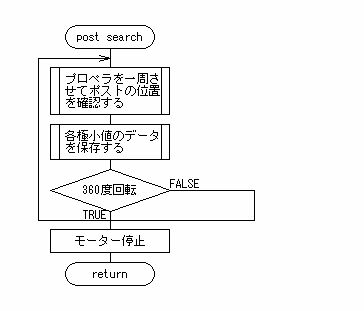
僾儘儁儔傪堦廃偝偣偰億僗僩偺埵抲傪妋擣偡傞儌僕儏乕儖
掕媊丗億僗僩偺偁傞埵抲傪妋擣偡傞
峔惉梫慺丗挻壒攇僙儞僒丄僗僥僢僺儞僌儌乕僞丄夞揮儌僕儏乕儖丄拞怱敾暿儌僕儏乕儖丄埵抲妋擣儌僕儏乕儖
娭悢柤丗bamboo(void)
-
奺嬌彫抣偺僨乕僞傪曐懚偡傞儌僕儏乕儖
掕媊丗億僗僩埵抲忣曬傪曐懚偡傞
峔惉梫慺丗拞怱敾暿儌僕儏乕儖丄埵抲妋擣儌僕儏乕儖
娭悢柤丗post_save(void)
-
捈恑儌僕儏乕儖
婡擻丗巜掕偟偨嫍棧丄傑偨偼摿掕忦審傪枮偨偡傑偱捈恑(岎戙)偝偣傞娭悢孮丅
峔惉梫慺 曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶丗PWM/僄儞僐乕僟
娭悢柤丗straight_mod
堷悢丗側偟
栠傝抣丗amode,bmode
傾儖僑儕僘儉(僼儘乕僠儍乕僩)丗徣棯
-
夞揮儌僕儏乕儖
婡擻丗儘乕僞儕乕僄儞僐乕僟傪梡偄偰俵俬俼俽傪巜掕偟偨妏搙丄夞揮曽岦丄懍搙偱偦偺応偱夞揮偝偣傞娭悢孮丅
峔惉梫慺 曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶丗PWM/僄儞僐乕僟
娭悢柤丗turn_mod
堷悢丗側偟
栠傝抣丗amode,bmode
傾儖僑儕僘儉(僼儘乕僠儍乕僩)丗徣棯
-
惓懳敾暿儌僕儏乕儖
婡擻丗MIRS(挻壒攇僙儞僒)偲億僗僩偑惓懳偟偨帪傪敾暿偡傞偨傔偺娭悢孮丅
峔惉梫慺 曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶丗挻壒攇僙儞僒
娭悢柤丗toword_post
堷悢丗側偟
栠傝抣丗amode,bmode
傾儖僑儕僘儉(僼儘乕僠儍乕僩)丗徣棯
-
拞怱敾暿儌僕儏乕儖
婡擻丗億僗僩偺拞怱傪尒偮偗傞偨傔偺娭悢孲丅
峔惉梫慺 曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶丗僞僢僠僙儞僒丄PWM/僄儞僐乕僟
娭悢柤丗center_mod
堷悢丗側偟
栠傝抣丗amode,bmode
傾儖僑儕僘儉(僼儘乕僠儍乕僩)丗徣棯
-
億僗僩斣崋敾暿儌僕儏乕儖
婡擻丗億僗僩斣崋傪敾暿偡傞偨傔偺娭悢孮丅
峔惉梫慺 曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶丗愒奜慄僙儞僒
娭悢柤丗post_no_jadge
堷悢丗側偟
栠傝抣丗amode,bmode
傾儖僑儕僘儉(僼儘乕僠儍乕僩)丗徣棯
-
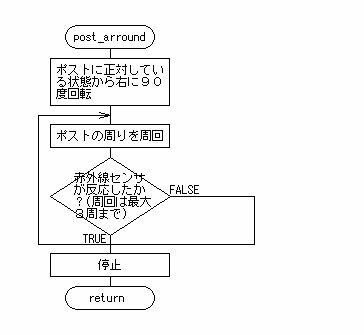
億僗僩廃夞儌僕儏乕儖
婡擻丗巜掕偟偨妏搙丄傑偨偼摿掕忦審傪枮偨偡傑偱億僗僩傪廃夞偝偣傞娭悢孮丅
峔惉梫慺 曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶丗PWM/僄儞僐乕僟
娭悢柤丗around_post
堷悢丗側偟
栠傝抣丗amode,bmode
傾儖僑儕僘儉(僼儘乕僠儍乕僩)丗徣棯
-
栚昗億僗僩寛掕儌僕儏乕儖
婡擻丗億僗僩僨乕僞傛傝師偺栚昗億僗僩傪寛掕偡傞偨傔偺娭悢孮丅
峔惉梫慺 曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶丗側偟
娭悢柤丗next_post_mod
堷悢丗側偟
栠傝抣丗amode,bmode
傾儖僑儕僘儉(僼儘乕僠儍乕僩)丗徣棯
-
埵抲妋擣儌僕儏乕儖
婡擻丗廃夞扵嶕儌乕僪偱摼偨億僗僩僨乕僞傛傝丄MIRS偺廃夞偟偨億僗僩偵懳偡傞擣幆偑惓偟偄偐妋擣丄娫堘偭偰偄偨傜廋惓偡傞丅
峔惉梫慺 曗彆娭悢丄RT 僞僗僋丄僨僶僀僗僪儔僀僶丗側偟
娭悢柤丗position
堷悢丗側偟
栠傝抣丗amode,bmode
傾儖僑儕僘儉(僼儘乕僠儍乕僩)丗徣棯