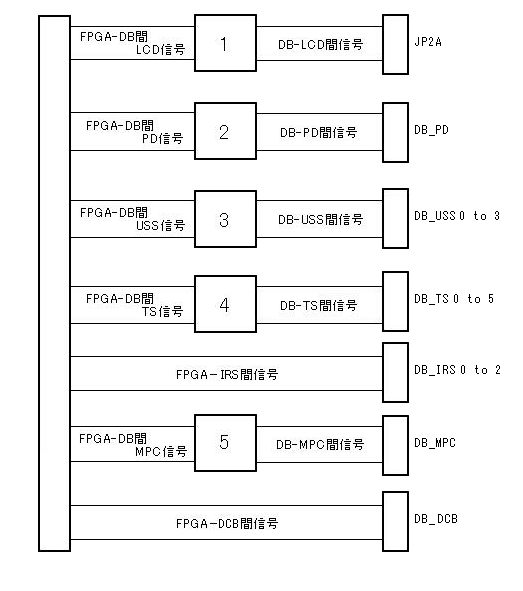
fig.3_1に概略ブロック図を示す。
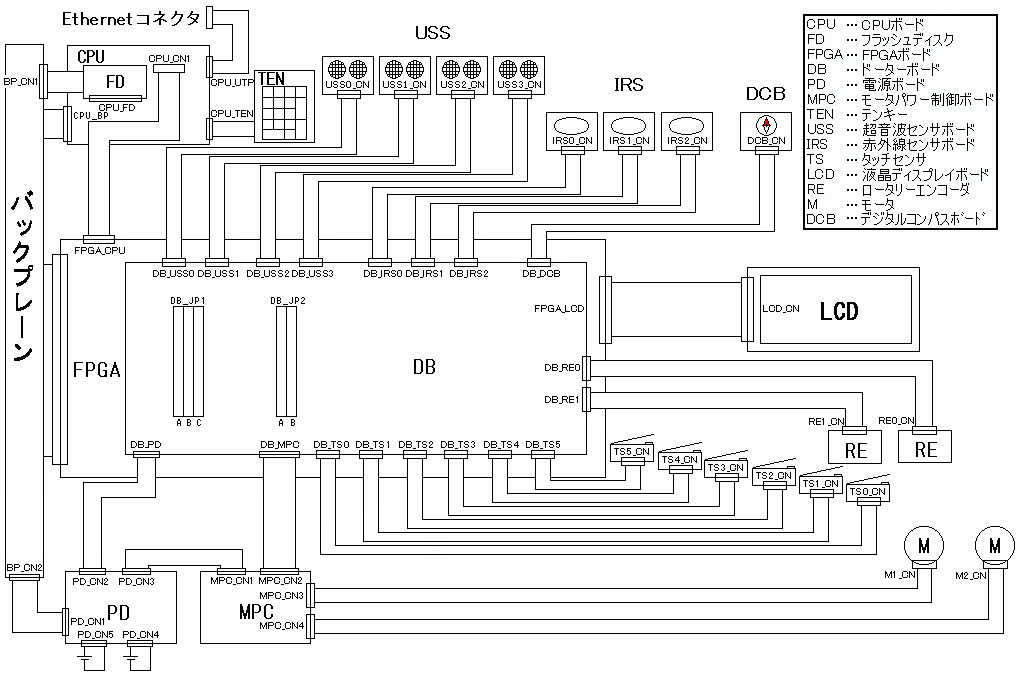
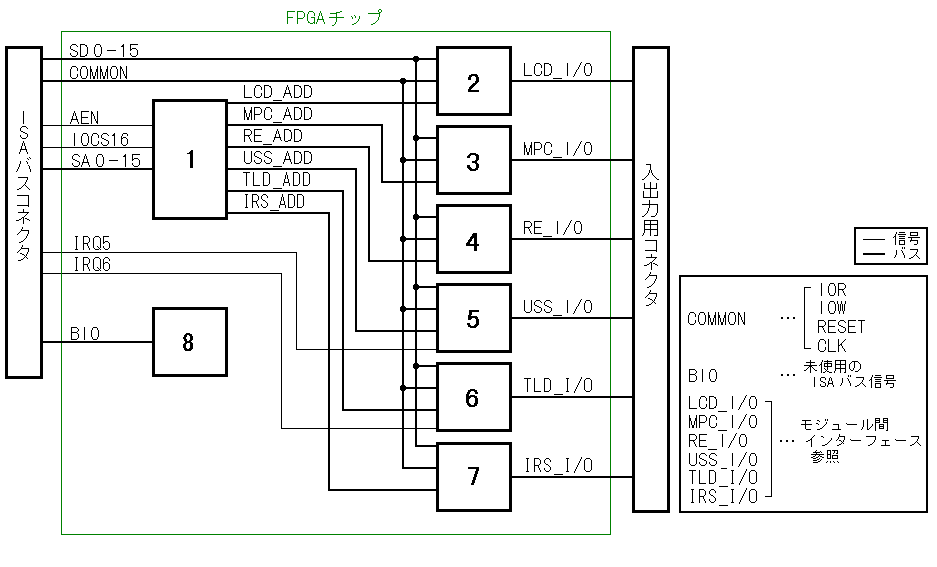
fig.3_2にFPGA内部ブロック図を示す。
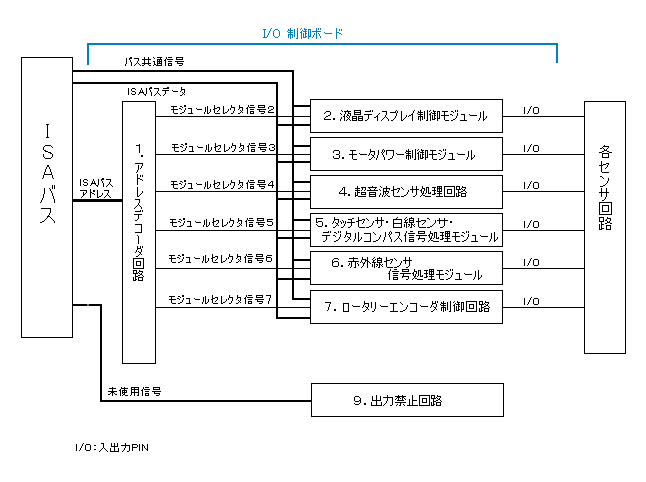
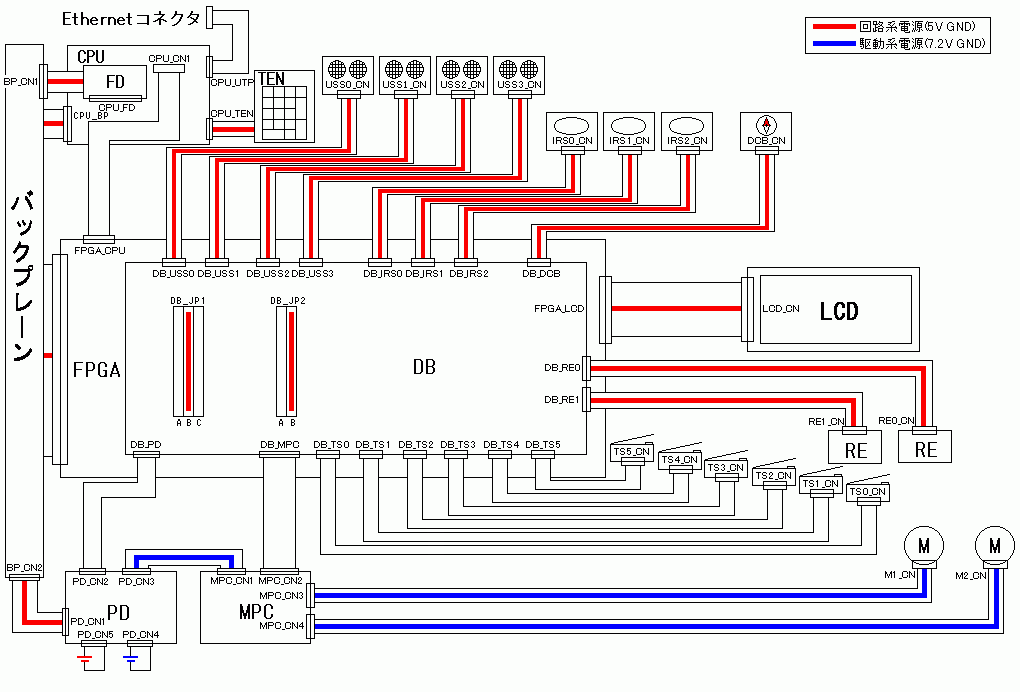
fig.3_3に電源系統図を示す。
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2003.5.30 | 駒崎 田中 村田 | 村田 | 初版 | ||
| A02 | 2003.6.13 | 村田 | 村田 | 電源を分割 | ||
| A02 | 2004.1.21 | 村田 | 村田 | ソフトウェアビジビリティ等を変更 | ||
| ISAラック スロット番号 |
搭載基板 |
|---|---|
|
|
空き |
|
|
CPUボード |
|
|
空き |
|
|
FPGAボード |
fig.5_2_1 BP_CN1のコネクタ形状
Table.5_2_1 BP_CN1のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vcc |
- |
+5V |
| 2 |
-5V |
- |
未使用 |
| 3 |
-12V |
- |
未使用 |
| 4 |
+12V |
- |
未使用 |
| 5 |
GND |
- |
GND |
fig.5_3_1 BP_CN2のコネクタ形状
Table.5_3_1 BP_CN2のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vcc |
- |
+5V |
| 2 |
-5V |
- |
未使用 |
| 3 |
-12V |
- |
未使用 |
| 4 |
+12V |
- |
未使用 |
| 5 |
GND |
- |
GND |
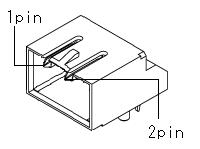
fig.5_3_2 PD_CN1のコネクタ形状
ピン.No
信号名
I/O
備考
1
Vcc
-
+5V
2
GND
-
GND
電源ケーブルの片側は電源用ターミナルを圧着してからBP_CN1にねじとワッシャを用いて取りつけ、
もう片側はMOLEX
51067用ターミナルを圧着してからMOLEX
51067-0220ハウジングに挿入し、PD_CN1に挿入する。
接続時のピン対応は下表を参照。また、+5Vには赤、GNDには黒の電源ケーブルを使用すること。
Table.5_3_3 BP_CN2とPD_CN1のピン対応
BP_CN2
PD_CN1
ピン.No
信号名
ピン.No
信号名
1
Vcc
<->
1
Vcc
2
-5V
<->
3
-12V
<->
4
+12V
<->
5
GND
<->
2
GND
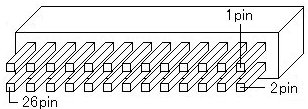
fig.5_8_1 LCD_CNのコネクタ形状
Table.5_8_1 FPGA_LCDのインターフェース| ピン.No |
信号名 |
I/O |
備考 |
ピン.No |
信号名 |
I/O |
備考 | |
| 1 |
Vcc |
- |
+5V |
14 |
LCD_DB7 |
INOUT |
データビット7 | |
| 2 |
GND |
- |
GND |
15 |
- |
- |
未使用 | |
| 3 |
Vee |
- |
コントラストADJ |
16 |
- |
- | ||
| 4 |
LCD_RS |
OUT |
レジスタセレクト |
17 |
- |
- | ||
| 5 |
LCD_R/W |
OUT |
READ/WRITE |
18 |
- |
- | ||
| 6 |
LCD_E |
OUT |
Enable信号 |
19 |
- |
- | ||
| 7 |
LCD_DB0 |
INOUT |
データビット0 |
20 |
- |
- | ||
| 8 |
LCD_DB1 |
INOUT |
データビット1 |
21 |
- |
- | ||
| 9 |
LCD_DB2 |
INOUT |
データビット2 |
22 |
- |
- | ||
| 10 |
LCD_DB3 |
INOUT |
データビット3 |
23 |
- |
- | ||
| 11 |
LCD_DB4 |
INOUT |
データビット4 |
24 |
- |
- | ||
| 12 |
LCD_DB5 |
INOUT |
データビット5 |
25 |
- |
- | ||
| 13 |
LCD_DB6 |
INOUT |
データビット6 |
26 |
- |
- |
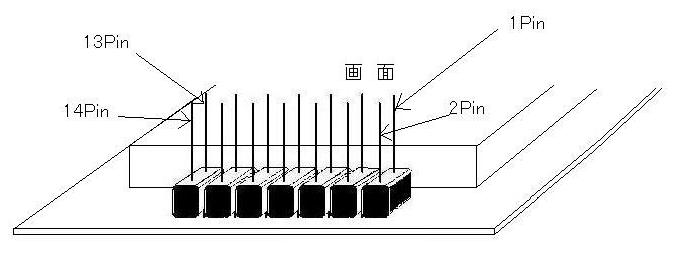
fig.5_8_2 LCD_CNのコネクタ形状
Table.5_8_2 LCD_CNのインターフェース| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vcc |
- |
+5V |
| 2 |
GND |
- |
GND |
| 3 |
Vee |
- |
コントラストADJ |
| 4 |
RS |
LCD_IN |
レジスタセレクト |
| 5 |
LCD_R/W |
IN |
READ/WRITE |
| 6 |
LCD_E |
IN |
Enable信号 |
| 7 |
LCD_DB0 |
INOUT |
データビット0 |
| 8 |
LCD_DB1 |
INOUT |
データビット1 |
| 9 |
LCD_DB2 |
INOUT |
データビット2 |
| 10 |
LCD_DB3 |
INOUT |
データビット3 |
| 11 |
LCD_DB4 |
INOUT |
データビット4 |
| 12 |
LCD_DB5 |
INOUT |
データビット5 |
| 13 |
LCD_DB6 |
INOUT |
データビット6 |
| 14 |
LCD_DB7 |
INOUT |
データビット7 |
| FPGA_LCD | LCD_CN | FPGA_LCD | LCD_CN | ||||||||||||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
ピン.No |
信号名 |
ピン.No |
信号名 | ||||||||||
| 1 |
Vcc |
<-> | 1 |
Vcc |
14 |
LCD_DB7 |
<-> | 14 |
LCD_DB7 | ||||||||
| 2 |
GND |
<-> | 2 |
GND |
15 |
- |
<-> | 15 |
- |
||||||||
| 3 |
Vee |
<-> | 3 |
Vee |
16 |
- |
<-> | 16 |
- |
||||||||
| 4 |
LCD_RS |
<-> | 4 |
LCD_RS |
17 |
- |
<-> | 17 |
- |
||||||||
| 5 |
LCD_R/W |
<-> | 5 |
LCD_R/W |
18 |
- |
<-> | 18 |
- |
||||||||
| 6 |
LCD_E |
<-> | 6 |
LCD_E |
19 |
- |
<-> | 19 |
- |
||||||||
| 7 |
LCD_DB0 |
<-> | 7 |
LCD_DB0 |
20 |
- |
<-> | 20 |
- |
||||||||
| 8 |
LCD_DB1 |
<-> | 8 |
LCD_DB1 |
21 |
- |
<-> | 21 |
- |
||||||||
| 9 |
LCD_DB2 |
<-> | 9 |
LCD_DB2 |
22 |
- |
<-> | 22 |
- |
||||||||
| 10 |
LCD_DB3 |
<-> | 10 |
LCD_DB3 |
23 |
- |
<-> | 23 |
- |
||||||||
| 11 |
LCD_DB4 |
<-> | 11 |
LCD_DB4 |
24 |
- |
<-> | 24 |
- |
||||||||
| 12 |
LCD_DB5 |
<-> | 12 |
LCD_DB5 |
25 |
- |
<-> | 25 |
- |
||||||||
| 13 |
LCD_DB6 |
<-> | 13 |
LCD_DB6 |
26 |
- |
<-> | 26 |
- |
||||||||

Figure.5_9_1 FPGA_JP20Aのコネクタ形状
* コネクタの取りつけ位置、および方向はマイコンビルダー取扱説明書を参照。
Table.5_9_1 FPGA_JP20Aのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
ピン.No |
信号名 |
I/O |
備考 |
|
| 1 |
LS1 |
IN |
白線センサ信号 1 |
11 |
TS0 |
IN |
タッチセンサ信号 0 |
|
| 2 |
IRS0 |
IN |
赤外線センサ信号 0 |
12 |
TS1 |
IN |
タッチセンサ信号 1 |
|
| 3 |
IRS1 |
IN |
赤外線センサ信号 1 |
13 |
TS2 |
IN |
タッチセンサ信号 2 |
|
| 4 |
DC0 |
IN |
デジタルコンパス信号 0 |
14 |
TS3 |
IN |
タッチセンサ信号 3 |
|
| 5 |
DC1 |
IN |
デジタルコンパス信号 1 |
15 |
TS4 |
IN |
タッチセンサ信号 4 |
|
| 6 |
DC2 |
IN |
デジタルコンパス信号 2 |
16 |
TS5 |
IN |
タッチセンサ信号 5 |
|
| 7 |
RE0_A |
IN |
ロータリーエンコーダ0 チャンネルA |
17 |
R_DIR |
OUT |
MPC 右方向信号。オープンコレクタ出力 |
|
| 8 |
RE0_B |
IN |
ロータリーエンコーダ0 チャンネルB |
18 |
R_PWM |
OUT |
MPC 右PWM信号。オープンコレクタ出力 |
|
| 9 |
RE1_A |
IN |
ロータリーエンコーダ1 チャンネルA |
19 |
L_DIR |
OUT |
MPC 左方向信号。オープンコレクタ出力 |
|
| 10 |
RE1_B |
IN |
ロータリーエンコーダ1 チャンネルB |
20 |
L_PWM |
OUT |
MPC 左PWM信号。オープンコレクタ出力 |

Figure.5_9_2 DB_JP1Aのコネクタ形状
* コネクタの取りつけ位置、および方向はドーターボード外形図を参照。
Table.5_9_2 DB_JP1Aのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
ピン.No |
信号名 |
I/O |
備考 |
|
| 1 |
LS1 |
OUT |
白線センサ信号 1 |
11 |
TS0 |
OUT |
タッチセンサ信号 0 |
|
| 2 |
IRS0 |
OUT |
赤外線センサ信号 0 |
12 |
TS1 |
OUT |
タッチセンサ信号 1 |
|
| 3 |
IRS1 |
OUT |
赤外線センサ信号 1 |
13 |
TS2 |
OUT |
タッチセンサ信号 2 |
|
| 4 |
DC0 |
OUT |
デジタルコンパス信号 0 |
14 |
TS3 |
OUT |
タッチセンサ信号 3 |
|
| 5 |
DC1 |
OUT |
デジタルコンパス信号 1 |
15 |
TS4 |
OUT |
タッチセンサ信号 4 |
|
| 6 |
DC2 |
OUT |
デジタルコンパス信号 2 |
16 |
TS5 |
OUT |
タッチセンサ信号 5 |
|
| 7 |
RE0_A |
OUT |
ロータリーエンコーダ0 チャンネルA |
17 |
R_DIR |
IN |
MPC 右方向信号 |
|
| 8 |
RE0_B |
OUT |
ロータリーエンコーダ0 チャンネルB |
18 |
R_PWM |
IN |
MPC 右PWM信号 |
|
| 9 |
RE1_A |
OUT |
ロータリーエンコーダ1 チャンネルA |
19 |
L_DIR |
IN |
MPC 左方向信号 |
|
| 10 |
RE1_B |
OUT |
ロータリーエンコーダ1 チャンネルB |
20 |
L_PWM |
IN |
MPC 左PWM信号 |
fig.5_9_3 FPGA_JP30Cのコネクタ形状
* コネクタの取りつけ位置、および方向はマイコンビルダー取扱説明書を参照。
Table.5_9_3 FPGA_JP30Cのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
ピン.No |
信号名 |
I/O |
備考 |
|
| 1 |
PO |
IN |
パワーオン信号 |
11 |
- |
- |
- |
|
| 2 |
- |
- |
- |
12 |
- |
- |
- |
|
| 3 |
- |
- |
- |
13 |
- |
- |
- |
|
| 4 |
- |
- |
- |
14 |
- |
- |
- |
|
| 5 |
- |
- |
- |
15 |
Vcc |
- |
5V |
|
| 6 |
- |
- |
- |
16 |
Vcc |
- |
5V |
|
| 7 |
- |
- |
- |
17 |
Vcc |
- |
5V |
|
| 8 |
- |
- |
- |
18 |
Vcc |
- |
5V |
|
| 9 |
- |
- |
- |
19 |
Vcc |
- |
5V |
|
| 10 |
- |
- |
- |
20 |
Vcc |
- |
5V |
fig.5_9_4 DB_JP1Bのコネクタ形状
* コネクタの取りつけ位置、および方向はドーターボード外形図を参照。
Table.5_9_4 DB_JP1Bのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
ピン.No |
信号名 |
I/O |
備考 |
|
| 1 |
PO |
OUT |
パワーオン信号 |
11 |
- |
- |
- |
|
| 2 |
- |
- |
- |
12 |
- |
- |
- |
|
| 3 |
- |
- |
- |
13 |
- |
- |
- |
|
| 4 |
- |
- |
- |
14 |
- |
- |
- |
|
| 5 |
- |
- |
- |
15 |
Vcc |
- |
5V |
|
| 6 |
- |
- |
- |
16 |
Vcc |
- |
5V |
|
| 7 |
- |
- |
- |
17 |
Vcc |
- |
5V |
|
| 8 |
- |
- |
- |
18 |
Vcc |
- |
5V |
|
| 9 |
- |
- |
- |
19 |
Vcc |
- |
5V |
|
| 10 |
- |
- |
- |
20 |
Vcc |
- |
5V |
Figure.5_9_5 FPGA_JP20Bのコネクタ形状
* コネクタの取りつけ位置、および方向はマイコンビルダー取扱説明書を参照。
Table.5_9_5 FPGA_JP20Bのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
ピン.No |
信号名 |
I/O |
備考 |
|
| 1 |
UT0 |
OUT |
超音波センサ送信信号 0 |
11 |
R/W |
OUT |
LCD リード・ライト |
|
| 2 |
UR0 |
IN |
超音波センサ受信信号 0 |
12 |
E |
OUT |
LCD イネーブル |
|
| 3 |
UT1 |
OUT |
超音波センサ送信信号 1 |
13 |
DB0 |
INOUT |
LCD データ 0 |
|
| 4 |
UR1 |
IN |
超音波センサ受信信号 1 |
14 |
DB1 |
INOUT |
LCD データ 1 |
|
| 5 |
UT2 |
OUT |
超音波センサ送信信号 2 |
15 |
DB2 |
INOUT |
LCD データ 2 |
|
| 6 |
UR2 |
IN |
超音波センサ受信信号 2 |
16 |
DB3 |
INOUT |
LCD データ 3 |
|
| 7 |
UT3 |
OUT |
超音波センサ送信信号 3 |
17 |
DB4 |
INOUT |
LCD データ 4 |
|
| 8 |
UR3 |
IN |
超音波センサ受信信号 3 |
18 |
DB5 |
INOUT |
LCD データ 5 |
|
| 9 |
UTIM |
OUT |
超音波センサ受信タイミング信号 |
19 |
DB6 |
INOUT |
LCD データ 6 |
|
| 10 |
RS |
OUT |
LCD レジスタセレクト |
20 |
DB7 |
INOUT |
LCD データ 7 |
fig.5_9_6 DB_JP1Cのコネクタ形状
* コネクタの取りつけ位置、および方向はドーターボード外形図を参照。
Table.5_9_6 DB_JP1Cのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
ピン.No |
信号名 |
I/O |
備考 |
|
| 1 |
UT0 |
IN |
超音波センサ送信信号 0 |
11 |
R/W |
IN |
LCD リード・ライト |
|
| 2 |
UR0 |
OUT |
超音波センサ受信信号 0 |
12 |
E |
IN |
LCD イネーブル |
|
| 3 |
UT1 |
IN |
超音波センサ送信信号 1 |
13 |
DB0 |
INOUT |
LCD データ 0 |
|
| 4 |
UR1 |
OUT |
超音波センサ受信信号 1 |
14 |
DB1 |
INOUT |
LCD データ 1 |
|
| 5 |
UT2 |
IN |
超音波センサ送信信号 2 |
15 |
DB2 |
INOUT |
LCD データ 2 |
|
| 6 |
UR2 |
OUT |
超音波センサ受信信号 2 |
16 |
DB3 |
INOUT |
LCD データ 3 |
|
| 7 |
UT3 |
IN |
超音波センサ送信信号 3 |
17 |
DB4 |
INOUT |
LCD データ 4 |
|
| 8 |
UR3 |
OUT |
超音波センサ受信信号 3 |
18 |
DB5 |
INOUT |
LCD データ 5 |
|
| 9 |
UTIM |
IN |
超音波センサ受信タイミング信号 |
19 |
DB6 |
INOUT |
LCD データ 6 |
|
| 10 |
RS |
IN |
LCD レジスタセレクト |
20 |
DB7 |
INOUT |
LCD データ 7 |

Figure.16_g_7 FPGA_JP60Bのコネクタ形状
* コネクタの取りつけ位置、および方向はマイコンビルダー取扱説明書を参照。
Table.16_g_7 FPGA_JP60Bのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
ピン.No |
信号名 |
I/O |
備考 |
|
| 1 |
Vcc |
- |
5V |
8 |
DB1 |
INOUT |
LCD データ 1 |
|
| 2 |
GND |
- |
GND |
9 |
DB2 |
INOUT |
LCD データ 2 |
|
| 3 |
Vo |
- |
LCD コントラストアドジャスト |
10 |
DB3 |
INOUT |
LCD データ 3 |
|
| 4 |
RS |
OUT |
LCD レジスタセレクト |
11 |
DB4 |
INOUT |
LCD データ 4 |
|
| 5 |
R/W |
OUT |
LCD リード・ライト |
12 |
DB5 |
INOUT |
LCD データ 5 |
|
| 6 |
E |
OUT |
LCD イネーブル |
13 |
DB6 |
INOUT |
LCD データ 6 |
|
| 7 |
DB0 |
INOUT |
LCD データ 0 |
14 |
DB7 |
INOUT |
LCD データ 7 |
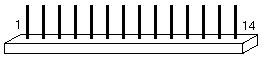
Figure.16_g_8 DB_JP2Aのコネクタ形状
* コネクタの取りつけ位置、および方向はドーターボード外形図を参照。
Table.16_g_8 DB_JP2Aのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
ピン.No |
信号名 |
I/O |
備考 |
|
| 1 |
Vcc |
- |
5V |
8 |
DB1 |
INOUT |
LCD データ 1 |
|
| 2 |
GND |
- |
GND |
9 |
DB2 |
INOUT |
LCD データ 2 |
|
| 3 |
Vo |
- |
LCD コントラストアドジャスト |
10 |
DB3 |
INOUT |
LCD データ 3 |
|
| 4 |
RS |
OUT |
LCD レジスタセレクト |
11 |
DB4 |
INOUT |
LCD データ 4 |
|
| 5 |
R/W |
OUT |
LCD リード・ライト |
12 |
DB5 |
INOUT |
LCD データ 5 |
|
| 6 |
E |
OUT |
LCD イネーブル |
13 |
DB6 |
INOUT |
LCD データ 6 |
|
| 7 |
DB0 |
INOUT |
LCD データ 0 |
14 |
DB7 |
INOUT |
LCD データ 7 |
Figure.16_g_9 FPGA_JP60Cのコネクタ形状
* コネクタの取りつけ位置、および方向はマイコンビルダー取扱説明書を参照。
Table.16_g_9 FPGA_JP60Cのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
ピン.No |
信号名 |
I/O |
備考 |
|
| 1 |
GND |
- |
GND |
8 |
GND |
- |
GND |
|
| 2 |
GND |
- |
GND |
9 |
GND |
- |
GND |
|
| 3 |
GND |
- |
GND |
10 |
GND |
- |
GND |
|
| 4 |
GND |
- |
GND |
11 |
GND |
- |
GND |
|
| 5 |
GND |
- |
GND |
12 |
GND |
- |
GND |
|
| 6 |
GND |
- |
GND |
13 |
GND |
- |
GND |
|
| 7 |
GND |
- |
GND |
14 |
GND |
- |
GND |
Figure.16_g_10 DB_JP2Bのコネクタ形状
* コネクタの取りつけ位置、および方向はドーターボード外形図を参照。
Table.16_g_10 DB_JP2Bのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
ピン.No |
信号名 |
I/O |
備考 |
|
| 1 |
GND |
- |
GND |
8 |
GND |
- |
GND |
|
| 2 |
GND |
- |
GND |
9 |
GND |
- |
GND |
|
| 3 |
GND |
- |
GND |
10 |
GND |
- |
GND |
|
| 4 |
GND |
- |
GND |
11 |
GND |
- |
GND |
|
| 5 |
GND |
- |
GND |
12 |
GND |
- |
GND |
|
| 6 |
GND |
- |
GND |
13 |
GND |
- |
GND |
|
| 7 |
GND |
- |
GND |
14 |
GND |
- |
GND |

Figure.16_g_11 FPGA_JP40Aのコネクタ形状
* コネクタの取りつけ位置、および方向はマイコンビルダー取扱説明書を参照。
Table.16_g_11 FPGA_JP40Aのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
LS0 |
IN |
白線センサ 0 |
| 2 |
- |
- |
- |
| 3 |
- |
- |
- |
| 4 |
- |
- |
- |
| 5 |
- |
- |
- |
| 6 |
- |
- |
- |
| 7 |
- |
- |
- |
| 8 |
- |
- |
- |

Figure.16_g_12 DB_JP3Aのコネクタ形状
* コネクタの取りつけ位置、および方向はドーターボード外形図を参照。
Table.16_g_12 DB_JP3Aのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
LS0 |
OUT |
白線センサ信号 0 |
Table.16_g_13 FPGAボードコネクタとドーターボードコネクタの対応関係
| FPGAボード |
ドーターボード |
|||
| JP20A |
<-> | JP1A |
||
| JP30C |
<-> | JP1B |
||
| JP20B |
<-> | JP1C |
||
| JP60B(1pin to 14pin) |
<-> | JP2A |
||
| JP60C(1pin to 14pin) |
<-> | JP2B |
||
| JP40A(1pin) |
<-> | JP3A |
||
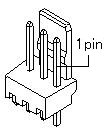
fig.5_10_1 DB_IRSN のコネクタ形状
Table.5_10_1 DB_IRSN のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vo |
IN |
赤外線受光信号 |
| 2 |
GND |
- |
GND |
| 3 |
Vcc | - | +5V |
fig.5_10_2 IRSN_CNのコネクタ形状
Table.5_10_2 IRSN_CNのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vo |
OUT |
赤外線受光信号 |
| 2 |
GND |
- |
GND |
| 3 |
Vcc | - | +5V |
Table.5_10_3 DB_IRSN と IRSN_CN のピン対応
| DB_IRS0 | IRS0_CN | ||||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
||||
| 1 |
Vo |
<-> | 1 |
Vo |
|||
| 2 |
GND |
<-> | 2 | GND | |||
| 3 |
Vcc |
<-> | 3 | Vcc | |||
| DB_IRS1 | IRS1_CN | ||||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
||||
| 1 |
Vo |
<-> | 1 |
Vo |
|||
| 2 |
GND |
<-> | 2 | GND | |||
| 3 |
Vcc |
<-> | 3 | Vcc | |||
fig.5_10_1 DB_LSN のコネクタ形状
Table.5_10_1 DB_LSN のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vo |
IN |
白線検知信号 |
| 2 |
Vcc |
- |
+5V |
| 3 |
GND | - | GND |
fig.5_10_2 LSN_CNのコネクタ形状
Table.5_10_2 LSN_CNのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vo |
OUT |
白線検知信号 |
| 2 |
Vcc |
- |
+5V |
| 3 |
GND | - | GND |
Table.5_10_3 DB_LSN と LSN_CN のピン対応
| DB_LS0 | LS0_CN | ||||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
||||
| 1 |
Vo |
<-> | 1 |
Vo |
|||
| 2 |
Vcc |
<-> | 2 | Vcc | |||
| 3 |
GND |
<-> | 3 | GND | |||
| DB_LS1 | LS1_CN | ||||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
||||
| 1 |
Vo |
<-> | 1 |
Vo |
|||
| 2 |
Vcc |
<-> | 2 | Vcc | |||
| 3 |
GND |
<-> | 3 | GND | |||
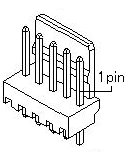
fig.5_11_1 DB_USSN のコネクタ形状
Table.5_11_1 DB_USSN のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vcc |
- |
+5V |
| 2 |
U0 |
OUT |
送信信号 |
| 3 |
U1 |
IN |
受信信号 |
| 4 |
UTIM |
OUT |
受信タイミング |
| 5 |
GND |
- |
GND |
fig.5_11_2 USSN_CNのコネクタ形状
Table.5_11_2 USSN_CNのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vcc |
- |
+5V |
| 2 |
U0 |
IN |
送信信号 |
| 3 |
U1 |
OUT |
受信信号 |
| 4 |
UTIM |
IN |
受信タイミング |
| 5 |
GND |
- |
GND |
Table.5_11_3 DB_USSN と USSN_CN のピン対応
| DB_USS0 | USS0_CN | DB_USS2 | USS2_CN | |||||||||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
ピン.No |
信号名 |
ピン.No |
信号名 |
|||||||
| 1 |
Vcc |
<-> | 1 |
Vcc |
1 |
Vcc |
<-> | 1 |
Vcc |
|||||
| 2 |
U0 |
<-> | 2 | U0 | 2 |
U0 |
<-> | 2 | U0 | |||||
| 3 |
U1 |
<-> | 3 | U1 | 3 |
U1 |
<-> | 3 | U1 | |||||
| 4 |
UTIM |
<-> | 4 | UTIM | 4 |
UTIM |
<-> | 4 | UTIM | |||||
| 5 |
GND |
<-> | 5 |
GND |
5 |
GND |
<-> | 5 |
GND |
|||||
| DB_USS1 | USS1_CN | DB_USS3 | USS3_CN | |||||||||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
ピン.No |
信号名 |
ピン.No |
信号名 |
|||||||
| 1 |
Vcc |
<-> | 1 |
Vcc |
1 |
Vcc |
<-> | 1 |
Vcc |
|||||
| 2 |
U0 |
<-> | 2 | U0 | 2 |
U0 |
<-> | 2 | U0 | |||||
| 3 |
U1 |
<-> | 3 | U1 | 3 |
U1 |
<-> | 3 | U1 | |||||
| 4 |
UTIM |
<-> | 4 | UTIM | 4 |
UTIM |
<-> | 4 | UTIM | |||||
| 5 |
GND |
<-> | 5 |
GND |
5 |
GND |
<-> | 5 |
GND |
|||||
fig.5_12_1 DB_TSN のコネクタ形状
Table.5_12_1 DB_TSN のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
GND |
- |
GND |
| 2 |
TSON |
IN |
タッチセンサON信号 |
| 3 |
TSOF | IN | タッチセンサOFF信号 |

fig.5_12_2 TSN_CN のコネクタ形状
Table.5_12_2 TSN_CN のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
GND |
- |
GND |
| 2 |
TSON |
OUT |
タッチセンサON信号 |
| 3 |
TSOF | OUT | タッチセンサOFF信号 |
Table.5_12_3 DB_TSN と TSN_CN のピン対応
| DB_TS0 | TS0_CN | DB_TS3 | TS3_CN | |||||||||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
ピン.No |
信号名 |
ピン.No |
信号名 |
|||||||
| 1 |
GND |
<-> | 1 | GND | 1 |
GND |
<-> | 1 | GND | |||||
| 2 |
TSON |
<-> | 2 |
TSON |
2 |
TSON |
<-> | 2 |
TSON |
|||||
| 3 |
TSOF |
<-> | 3 | TSOF | 3 |
TSOF |
<-> | 3 | TSOF | |||||
| DB_TS1 | TS1_CN | DB_TS4 | TS4_CN | |||||||||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
ピン.No |
信号名 |
ピン.No |
信号名 |
|||||||
| 1 |
GND |
<-> | 1 | GND | 1 |
GND |
<-> | 1 | GND | |||||
| 2 |
TSON |
<-> | 2 |
TSON |
2 |
TSON |
<-> | 2 |
TSON |
|||||
| 3 |
TSOF |
<-> | 3 | TSOF | 3 |
TSOF |
<-> | 3 | TSOF | |||||
| DB_TS2 | TS2_CN | DB_TS5 | TS5_CN | |||||||||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
ピン.No |
信号名 |
ピン.No |
信号名 |
|||||||
| 1 |
GND |
<-> | 1 | GND | 1 |
GND |
<-> | 1 | GND | |||||
| 2 |
TSON |
<-> | 2 |
TSON |
2 |
TSON |
<-> | 2 |
TSON |
|||||
| 3 |
TSOF |
<-> | 3 | TSOF | 3 |
TSOF |
<-> | 3 | TSOF | |||||
fig.5_13_1 DB_RE0,DB_RE1のコネクタ形状
Table.5_13_1 DB_RE0,DB_RE1のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
CH_B |
IN |
チャネルB層の信号 |
| 2 |
Vcc |
- |
+5V |
| 3 |
CH_A |
IN |
チャネルA層の信号 |
| 4 |
GND |
- |
GND |
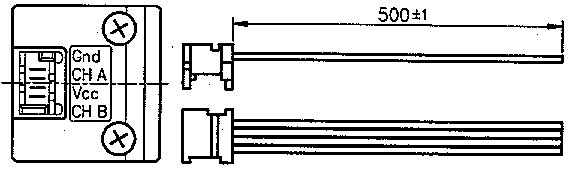
fig.5_13_2 RE0_CN,RE1_CNのコネクタ形状とコネクタケーブル形状
Table.5_13_2 RE0_CN,RE1_CNのインターフェイス
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
CH_B |
OUT |
チャネルB層の信号 |
| 2 |
Vcc |
- |
+5V |
| 3 |
CH_A |
OUT |
チャネルA層の信号 |
| 4 |
GND |
- |
GND |
Table.5_13_3 DB_RE0,DB_RE1 と RE0_CN,RE1_CN のピン対応
| DB_RE0 | RE0_CN | |||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
|||
| 1 |
CH_B |
<-> | 1 |
CH_B |
||
| 2 |
Vcc |
<-> | 2 | Vcc | ||
| 3 |
CH_A |
<-> | 3 | CH_B | ||
| 4 |
GND |
<-> | 4 | GND | ||
| DB_RE1 | RE1_CN | |||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
|||
| 1 |
CH_B |
<-> | 1 |
CH_B |
||
| 2 |
Vcc |
<-> | 2 | Vcc | ||
| 3 |
CH_A |
<-> | 3 | CH_B | ||
| 4 |
GND |
<-> | 4 | GND | ||
fig.5_14_1 DB_DC のコネクタ形状
Table.5_14_1 DB_DC のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vcc |
- |
+5V |
| 2 |
D0 |
IN |
受信信号 |
| 3 |
D1 |
IN |
受信信号 |
| 4 |
D2 |
IN |
受信信号 |
| 5 |
GND |
- |
GND |
fig.5_14_2 DC_CNのコネクタ形状
Table.5_14_2 DC_CNのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vcc |
- |
+5V |
| 2 |
D0 |
OUT |
受信信号 |
| 3 |
D1 |
OUT |
受信信号 |
| 4 |
D2 |
OUT |
受信信号 |
| 5 |
GND |
- |
GND |
Table.5_14_3 DB_DC と DC_CN のピン対応
| DB_DC | DC_CN | |||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
|||
| 1 |
Vcc |
<-> | 1 |
Vcc |
||
| 2 |
D0 |
<-> | 2 | D0 | ||
| 3 |
D0 |
<-> | 3 | D1 | ||
| 4 |
D2 |
<-> | 4 | D2 | ||
| 5 |
GND |
<-> | 5 |
GND |
||
fig.5_15_1 DB_MPCのコネクタ形状
Table.5_15_1 DB_MPCのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vcc |
- |
+5V |
| 2 |
R_DIR |
OUT |
右方向信号 |
| 3 |
R_PWM |
OUT |
右PWM信号 |
| 4 |
L_DIR |
OUT |
左方向信号 |
| 5 |
L_PWM |
OUT |
左PWM信号 |
fig.5_15_2 MPC_CN1のコネクタ形状
Table.5_15_2 MPC_CN1のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vcc |
- |
+5V |
| 2 |
R_DIR |
OUT |
右方向信号 |
| 3 |
R_PWM |
OUT |
右PWM信号 |
| 4 |
L_DIR |
OUT |
左方向信号 |
| 5 |
L_PWM |
OUT |
左PWM信号 |
Table.5_15_3 DB_MPC と MPC_CN1 のピン対応
| DB_MPC | MPC_CN1 | |||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
|||
| 1 |
Vcc |
<-> | 1 |
Vcc |
||
| 2 |
R_DIR |
<-> | 2 | R_DIR | ||
| 3 |
R_PWM |
<-> | 3 | R_PWM | ||
| 4 |
L_DIR |
<-> | 4 | L_DIR | ||
| 5 |
L_PWM |
<-> | 5 |
L_PWM |
||
fig.5_16_1 DB_PDのコネクタ形状
Table.5_16_1 DB_PDのインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
- | - | 未使用 |
| 2 |
Vsig |
- |
駆動系電源ON信号 |
| 3 |
GND |
- |
GND |
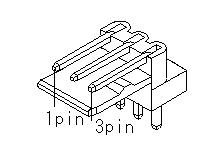
fig.5_16_2 PD_CN2のコネクタ形状
Table.5_16_2 PD_CN2のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
- | - | 未使用 |
| 2 |
Vsig |
- |
駆動系電源ON信号 |
| 3 |
GND |
- |
GND |
Table.5_16_3 DB_PD と PD_CN2 のピン対応
| DB_PD | PD_CN2 | |||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
|||
| 1 |
- |
<-> | 1 | - | ||
| 2 |
Vsig |
<-> | 2 |
Vsig |
||
| 3 |
GND |
<-> | 3 | GND | ||
fig.5_17_1 MPC_CN1のコネクタ形状
Table.5_17_1 MPC_CN1のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vin |
- |
+7.2V |
| 2 |
GND |
- |
GND |
fig.5_17_2 PD_CN3のコネクタ形状
Table.5_17_2 PD_CN3のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vin | - |
+7.2V |
| 2 |
GND |
- |
GND |
Table.5_17_3 MPC_CN1 と PD_CN3 のピン対応
| MPC_CN1 | PD_CN3 | |||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
|||
| 1 |
Vin |
<-> | 1 |
Vin |
||
| 2 |
GND |
<-> | 2 | GND | ||
fig.5_18_1 PD_CN4,PD_CN5のコネクタ形状
Table.5_18_1 PD_CN4,PD_CN5のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vin |
- |
+7.2 |
| 2 |
GND |
- |
GND |
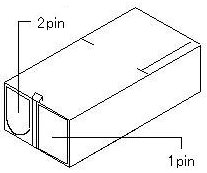
fig.5_18_2 バッテリコネクタ 1,2のコネクタ形状
Table.5_18_2 バッテリコネクタ 1,2のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vin |
- |
+7.2V |
| 2 |
GND |
- |
GND |
Table.5_18_3 PD_CN4,PD_CN5 とバッテリコネクタ 1,2のピン対応
| PD_CN4 | バッテリコネクタ 1 | |||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
|||
| 1 |
Vin |
<-> | 1 |
Vin |
||
| 2 |
GND |
<-> | 2 | GND | ||
| PD_CN5 | バッテリコネクタ 2 | |||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
|||
| 1 |
Vin |
<-> | 1 |
Vin |
||
| 2 |
GND |
<-> | 2 | GND | ||
fig.5_19_1 MPC_CN3,MPC_CN4のコネクタ形状
Table.5_19_1 MPC_CN3,MPC_CN4のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vo1 |
- |
正極 |
| 2 |
Vo2 |
- |
負極 |
Table.5_19_2 M1,M2のインターフェース
| ピン.No |
信号名 |
I/O |
備考 |
| 1 |
Vo1 |
- |
正極 |
| 2 |
Vo2 |
- |
負極 |
Table.5_19_3 MPC_CN3,MPC_CN4 と M1,2 のピン対応
| MPC_CN3 | M1 | |||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
|||
| 1 |
Vo1 |
<-> | 1 |
Vo1 |
||
| 2 |
Vo2 |
<-> | 2 | Vo2 | ||
| MPC_CN4 | M2 | |||||
| ピン.No |
信号名 |
ピン.No |
信号名 |
|||
| 1 |
Vo1 |
<-> | 1 |
Vo1 |
||
| 2 |
Vo2 |
<-> | 2 | Vo2 | ||
| 信号名 |
I/O |
機能 |
| SA 0 to 15 |
OUT |
16bit アドレスバス |
| AEN |
IN |
アドレス開放 |
| IOCS16 |
OUT |
16bit I/Oサイクルに 1 ウェイトで応答 |
| LCD_ADD |
OUT |
LCD_Mセレクタ信号 |
| MPC_ADD |
OUT |
MPC_Mセレクタ信号 |
| RE_ADD |
OUT |
RE_Mセレクタ信号 |
| USS_ADD |
OUT |
USS_Mセレクタ信号 |
| TLD_ADD |
OUT |
TLD_Mセレクタ信号 |
| IRS_ADD0…3 |
OUT |
IRS_M0…3セレクタ信号 |
| 信号名 |
I/O |
機能 |
| SD 0 to 15 |
OUT |
16bit データバス |
| IOR |
IN |
I/Oリード・ストローブ |
| IOW |
IN |
I/Oライト・ストローブ |
| RESET |
IN |
システム・リセット |
| CLK |
IN |
システム・クロック 8MHz デューティ50% |
| RS |
OUT |
レジスタ・セレクト |
| R/W |
OUT |
リード・ライト |
| E |
OUT |
イネーブル信号 |
| DB 0 to 7 |
INOUT |
入出力データ |
| 信号名 |
I/O |
機能 |
| SD 0 to 15 |
OUT |
16bit データバス |
| IOR |
IN |
I/Oリード・ストローブ |
| IOW |
IN |
I/Oライト・ストローブ |
| RESET |
IN |
システム・リセット |
| CLK |
IN |
システム・クロック 8MHz デューティ50% |
| R_DIR |
OUT |
右方向信号。オープンコレクタ出力 |
| R_PWM |
OUT |
右PWM信号。オープンコレクタ出力 |
| L_DIR |
OUT |
左方向信号。オープンコレクタ出力 |
| L_PWM |
OUT |
左PWM信号。オープンコレクタ出力 |
| 信号名 |
方 向 |
対 象 |
概 要 |
| RE_X |
IN |
アドレスデコーダ | モジュールセレクタ信号(Xカウンタ選択用) |
| RE_Y |
IN |
アドレスデコーダ | モジュールセレクタ信号(Yカウンタ選択用) |
| SD 0 to 15 |
INOUT |
ISA-Bus | 16bit データバス |
| IOR |
IN |
ISA-Bus | I/Oリード・ストローブ |
| IOW |
IN |
ISA-Bus | I/Oライト・ストローブ |
| RESET |
IN |
ISA-Bus | システム・リセット |
| CLK |
IN |
ISA-Bus | システム・クロック 8MHz デューティ50% |
| X_A,X_B |
IN |
ドーターボード | Xカウンタ用2相信号入力端子 |
| Y_A,Y_B |
IN |
ドーターボード | Yカウンタ用2相信号入力端子 |
| 信号名 |
I/O |
機能 |
| SD 0 to 15 |
OUT |
16bit データバス |
| IOR |
IN |
I/Oリード・ストローブ |
| IOW |
IN |
I/Oライト・ストローブ |
| RESET |
IN |
システム・リセット |
| CLK |
IN |
システム・クロック 8MHz デューティ50% |
| IRQ5 |
OUT |
割り込み要求。オープンコレクタ出力 |
| U0 |
OUT |
送信信号 |
| U1 |
IN |
受信信号 |
| UA,UB |
OUT |
超音波センサ選択信号 |
| UTIM |
OUT |
受信タイミング信号 |
| 信号名 |
I/O |
機能 |
| SD 0 to 15 |
OUT |
16bit データバス |
| IOR |
IN |
I/Oリード・ストローブ |
| IOW |
IN |
I/Oライト・ストローブ |
| RESET |
IN |
システム・リセット |
| CLK |
IN |
システム・クロック 8MHz デューティ50% |
| IRQ6 |
OUT |
割り込み要求。オープンコレクタ出力 |
| TS 0 to 5 |
IN |
タッチセンサ信号 |
| LS 0 to 1 |
IN |
白線センサ信号 |
| DC 0 to 2 |
IN |
デジタルコンパス信号 |
| 信号名 |
I/O |
機能 |
| SD 0 to 15 |
OUT |
16bit データバス |
| IOR |
IN |
I/Oリード・ストローブ |
| IOW |
IN |
I/Oライト・ストローブ |
| RESET |
IN |
システム・リセット |
| CLK |
IN |
システム・クロック 8MHz デューティ50% |
| IRQ7 |
OUT |
割り込み要求。オープンコレクタ出力 |
| IRS 0 to 2 |
IN |
赤外線センサ信号 |
| アドレス |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
R/W |
機能説明 |
| 0100H |
* |
* |
* |
* |
* |
* |
* |
* |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
W |
表示画面をクリア後、アドレスカウンタにDD RAMの0番地をセットする。 |
| * |
* |
* |
* |
* |
* |
* |
* |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
* |
W |
アドレスカウンタにDD RAMの0番地をセットする。 シフトしていた表示も元に戻るが、この時DD RAMの内容は変化しない。 |
|
| * |
* |
* |
* |
* |
* |
* |
* |
0 |
0 |
0 |
0 |
0 |
1 |
I/D |
S |
W |
データ書き込みおよびデータ読み出し時にカーソルの進む方向、 表示をシフトするかどうかの設定を行う。 |
|
| * |
* |
* |
* |
* |
* |
* |
* |
0 |
0 |
0 |
0 |
1 |
D |
C |
B |
W |
全表示のON/OFF(D)、カーソルのON/OFF(C)、 カーソル位置の文字のブリンク(B)をセットする。 |
|
| * |
* |
* |
* |
* |
* |
* |
* |
0 |
0 |
0 |
1 |
S/C |
R/L |
* |
* |
W |
DD RAMの内容を変えずカーソルの移動、表示のシフト動作を行う。 |
|
| * |
* |
* |
* |
* |
* |
* |
* |
0 |
0 |
1 |
DL |
N |
F |
* |
* |
W |
インターフェース長(DL)、表示桁数(N)、文字フォント(F)を設定する。 |
|
| * |
* |
* |
* |
* |
* |
* |
* |
0 |
1 |
Acc |
W |
CG RAMのアドレスをセットする。この後送受するのはDD RAMのデータ。 |
||||||
| * |
* |
* |
* |
* |
* |
* |
* |
1 |
Add |
W |
DD RAMのアドレスをセットする。この後送受するのはDD RAMのデータ。 |
|||||||
| * |
* |
* |
* |
* |
* |
* |
* |
BF |
AC |
R |
内部動作中を示すビジーフラグ(BF)およびアドレスカウンタの内容を読み出す。 |
|||||||
| 0102H |
* |
* |
* |
* |
* |
* |
* |
* |
Write Data |
W |
DD RAMまたはCG RAMにデータを書き込む。 |
|||||||
| * |
* |
* |
* |
* |
* |
* |
* |
Read Data |
R |
DD RAMまたはCG RAMにデータを読み出す。 |
||||||||
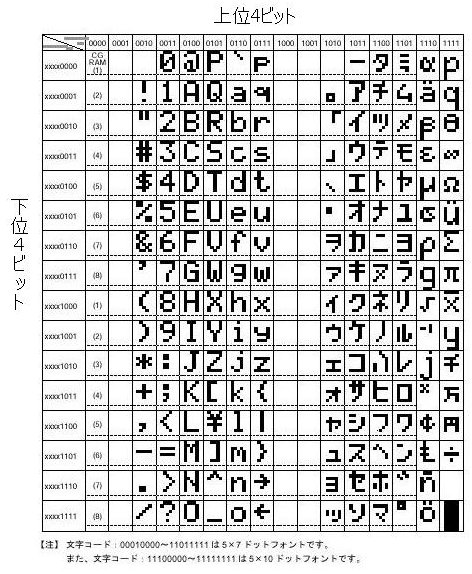
| * I/D | ・・・ | '1' : インクリメント | '0' : デクリメント | * S | ・・・ | '1' : 表示のシフトを行う | '0' : 表示のシフトを行わない | |||
| * S/C | ・・・ | '1' : 表示のシフト | '0' : カーソルの移動 | * R/L | ・・・ | '1' : 右シフト | ||||
| * DL | ・・・ | '1' : 8bit | '0' : 4bit | * N | ・・・ | '1' : 2行目 | '0' : 1行目 | |||
| * F | ・・・ | '1' : 5 x 10ドット | '0' : 5 x 7ドット | * BF | ・・・ | '1' : 内部動作中 | '0' : インストラクション受付可 | |||
| * DD RAM | ・・・ | 表示データRAM | * CG RAM | ・・・ | キャラクタジェネレータRAM | |||||
| * Acc | ・・・ | CG RAMのアドレス | * Add | ・・・ | DD RAMのアドレス、カーソル番地に対応する | |||||
| * AC | ・・・ | DD RAM、CG RAMの両方に用いるアドレスカウンタ | ||||||||
| * Writeデータ , Readデータ ・・・ 以下の文字コード表を参照 | ||||||||||
| アドレス |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
R/W |
機能説明 |
| 0110H |
* | * | * | * | * | * | * | * | L26 | L25 | L24 | L23 | L22 | L21 | L20 | LD | W |
方向データ、速度データから方向信号、PWM信号を生成する。 | * | * | * | * | * | * | * | * | L26 | L25 | L24 | L23 | L22 | L21 | L20 | LD | R | バッファの内容を送る。(ラッチされているか確認するため) |
| 0112H |
* | * | * | * | * | * | * | * | R26 | R25 | R24 | R23 | R22 | R21 | R20 | RD | W | 方向データ、速度データから方向信号、PWM信号を生成する。 |
| * | * | * | * | * | * | * | * | R26 | R25 | R24 | R23 | R22 | R21 | R20 | RD | R |
バッファの内容を送る。(ラッチされているか確認するため) |
| * L2X | ・・・ | 左速度データ | * R2X | ・・・ | 右速度データ | |||||
| * LD | ・・・ | '1' : 左タイヤ正転 | '0' : 左タイヤ逆転 | * RD | ・・・ | '1' : 右タイヤ正転 | '0' : 右タイヤ逆転 | |||
| アドレス |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
R/W |
機能説明 |
| 0120H |
D115 |
D114 |
D113 |
D112 |
D111 |
D110 |
D19 |
D18 |
D17 |
D16 |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
R |
ロータリーエンコーダのカウント値を読みこむ |
| * |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
1 |
W |
ロータリーエンコーダ1のカウントデータのリセット | |
| 0122H |
D215 |
D214 |
D213 |
D212 |
D211 |
D210 |
D29 |
D28 |
D27 |
D26 |
D25 |
D24 |
D23 |
D22 |
D21 |
D20 |
R |
ロータリーエンコーダのカウント値を読みこむ |
| * |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
1 |
W |
ロータリーエンコーダ2のカウントデータのリセット |
| * D2x,D3x | ・・・ | ロータリーエンコーダカウント値データ |
| アドレス |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
R/W |
機能説明 |
| 0130H |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
21 |
20 |
W |
D1,D0で選択したセンサに40μsecの間送信信号を送信する。 |
| 0132H |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
M |
R |
W |
超音波センサモジュールの割り込み信号(IRQ3)のマスク、アンマスク、リセットを行う。 |
| * M | ・・・ | '1' : 割り込み信号のマスク | '0' : 割り込み信号のアンマスク | * R | ・・・ | '1' : 割り込み信号のリセット |
| アドレス |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
R/W |
機能説明 |
| 140H |
'0' |
'0' |
TS5 |
TS4 |
TS3 |
TS2 |
TS1 |
TS0 |
'0' |
'0' |
'0' |
LS1 |
LS0 |
DC2 |
DC1 |
DC0 |
R |
TS*はタッチセンサ、LS*は白線センサ、DC*はデジタルコンパスの状態をそれぞれ示す。 |
| 0142H |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
M |
R |
W |
TLP_Mの割り込み信号(IRQ6)のマスク、アンマスク、リセットを行う。 |
| * TS*, LS*, DC* | ・・・ | '1' : ON | '0' : OFF | * M | ・・・ | '1' : 割り込み信号のマスク | '0' : 割り込み信号のアンマスク | |||
| * R | ・・・ | '1' : 割り込み信号のリセット | ||||||||
| アドレス |
D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
R/W |
機能説明 |
| 150H |
'0' |
IRS1 |
IRS0 |
F |
ID11 |
ID10 |
ID9 |
ID8 |
ID7 |
ID6 |
ID5 |
ID4 |
ID3 |
ID2 |
ID1 |
ID0 |
R |
赤外線センサIRS0の状態を示す。 ID*は各ポスト特有の信号を示す。 |
| 0152H |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
* |
R |
W |
IRS0のリセット、TLD_Mの割り込み信号(IRQ6)のマスク、アンマスク、リセットを行う。 |
| IRS *・・・'1' : ON | '0' : OFF | ID * | ・・・IRS0の符号データ | F : FLAG・・・'1'未読 | F : FLAG・・・'0'既読 | |||||||||||
| 番号 | 品名 | ドキュメント番号/商品名 | E/C | 数量 | 単位 | 備考 |
|---|---|---|---|---|---|---|
| DB_JP1A,B,C | ジャンパコネクタ | 20pin x 1 | E | 3 | 個 | |
| DB_JP2A,B | ジャンパコネクタ | 14pin x 1 | E | 2 | 個 | |
| DB_PD | 3pin コネクタ | MOLEX5046-03A | E | 1 | 個 | |
| DB_LS0 ~ DB_LS1 | 3pin コネクタ | MOLEX5046-03A | E | 2 | 個 | |
| DB_IRS0 ~ DB_IRS1 | 3pin コネクタ | MOLEX5046-03A | E | 2 | 個 | |
| DB_TS0 ~ DB_TS5 | 3pin コネクタ | MOLEX5046-03A | E | 6 | 個 | |
| DB_MPC | 5pin コネクタ | MOLEX5046-05A | E | 1 | 個 | |
| DB_DC | 5pin コネクタ | MOLEX5046-05A | E | 1 | 個 | |
| DB_USS0 ~ DB_USS3 | 5pin コネクタ | MOLEX5046-05A | E | 4 | 個 |
| Model | Spec | 使用電流 |
| CPUボード | AT-461VREP | 単一 3.5[A] |
| フラッシュメモリ | PQI/DiskOnMeodule | 65[mA] |
| 各ボード | 不明 | |
| 合計ピーク時電流 | 3565+α[mA] |
| 関連文書 |
|---|