- 赤外線センサ

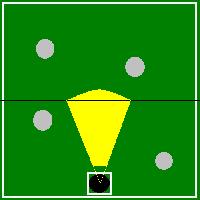
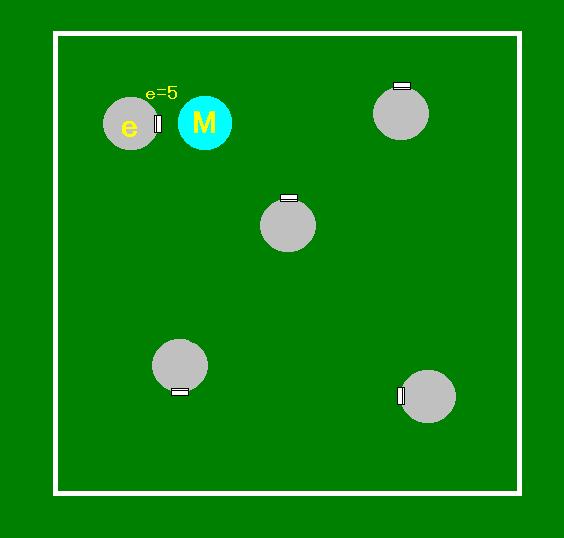
赤外線センサは、ポストのボタンから発信されている赤外線を感知するためのものです。
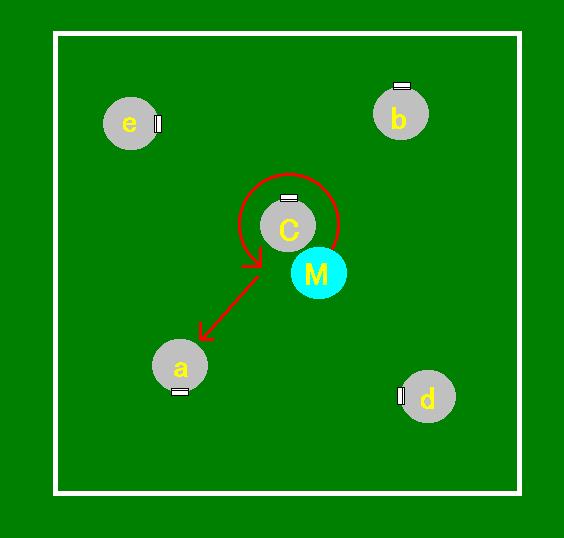
MIRSの前方のものは、ポストのボタンを押してポストを獲得できたかどうかを確認するためのもので、
MIRSの右側(このMIRSは時計回りにポストを回るので)のセンサは、ポストのボタンの位置を探すときに使います。
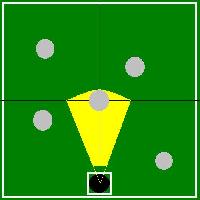
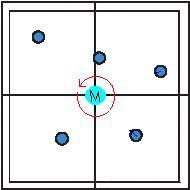
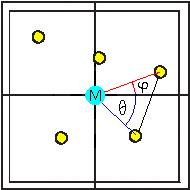
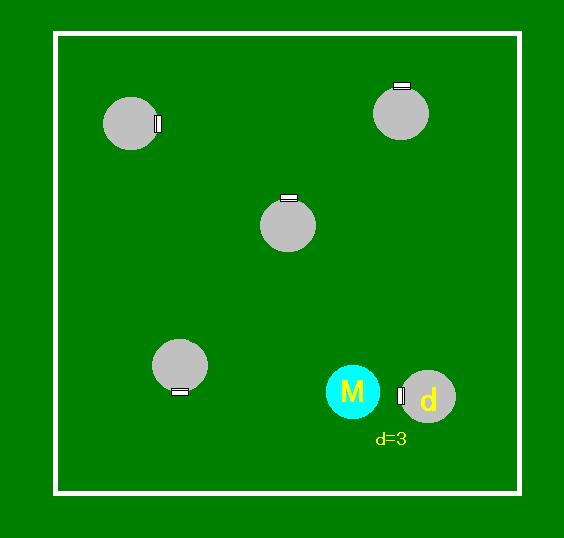
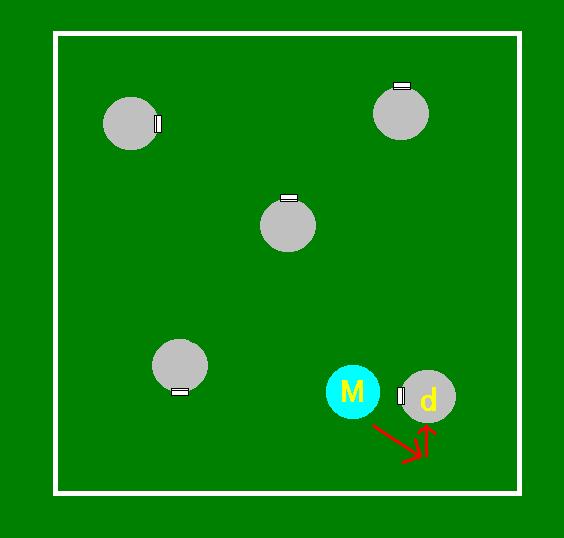
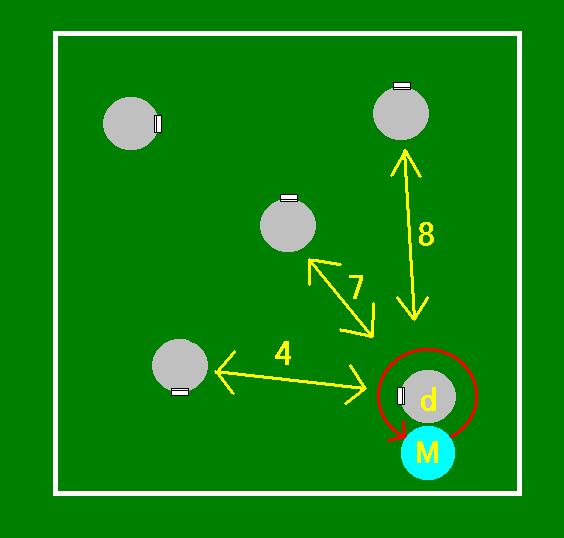
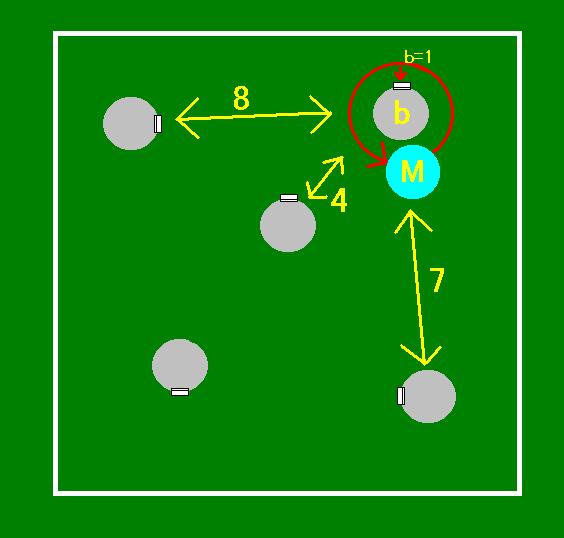
- 超音波センサ
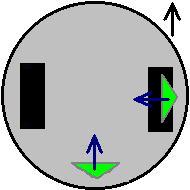
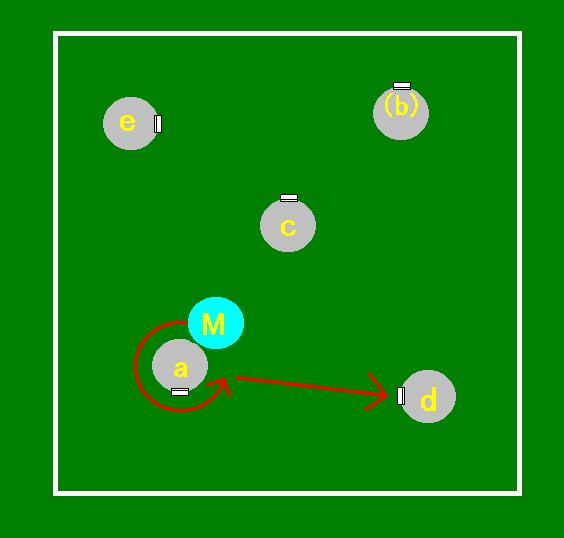
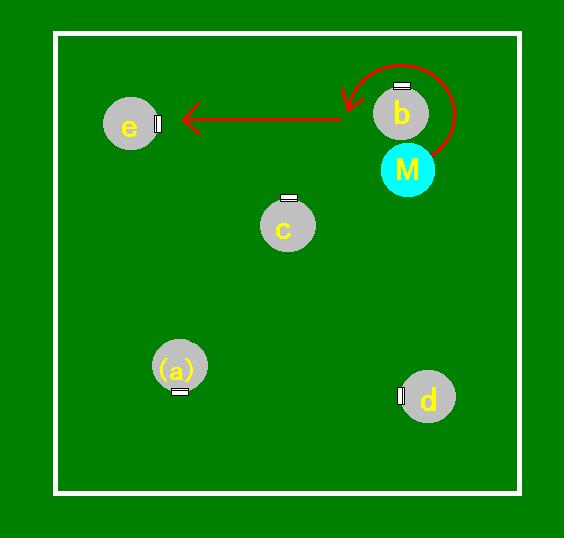
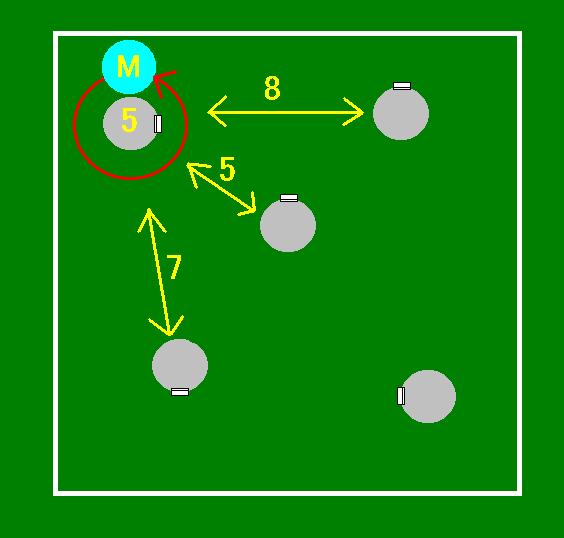
前向きの超音波センサはMIRSからポストまでの距離を測ります。左向きの超音波センサはポストの回りを回るときに
ポストの影になっている未発見のポストを見つける為のものです。
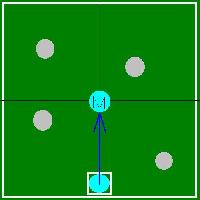
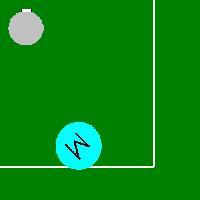
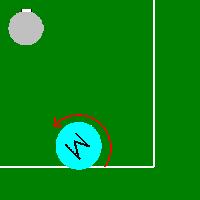
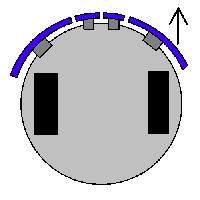
- 白線センサ
もし、MIRSが白線からでようとしてしまったときにMIRSの動きを止めて、白線センサ感知時の行動に移ります。
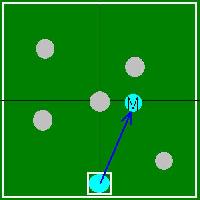
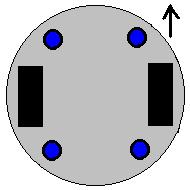
- タッチセンサ
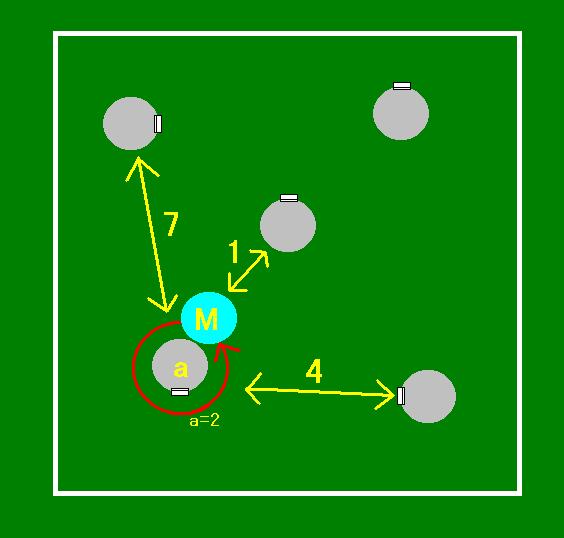
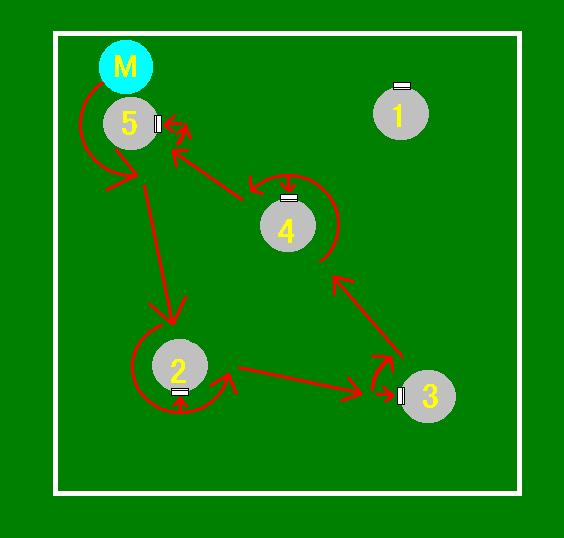
主にポストの中心を算出する際に使用します。
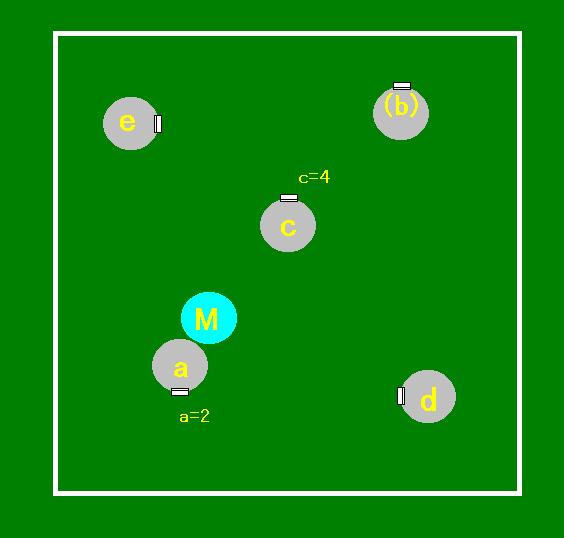
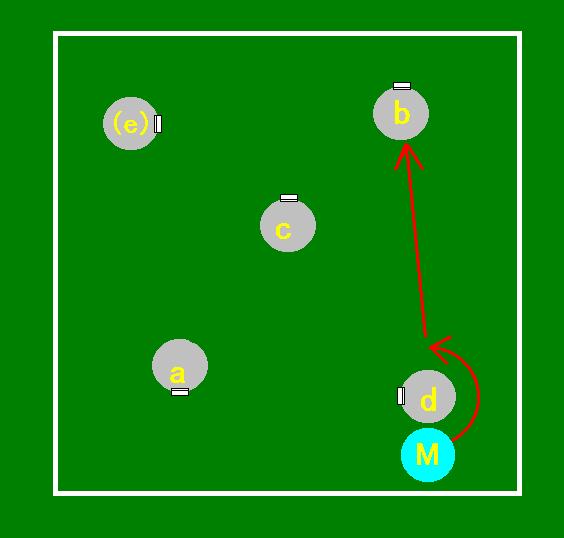
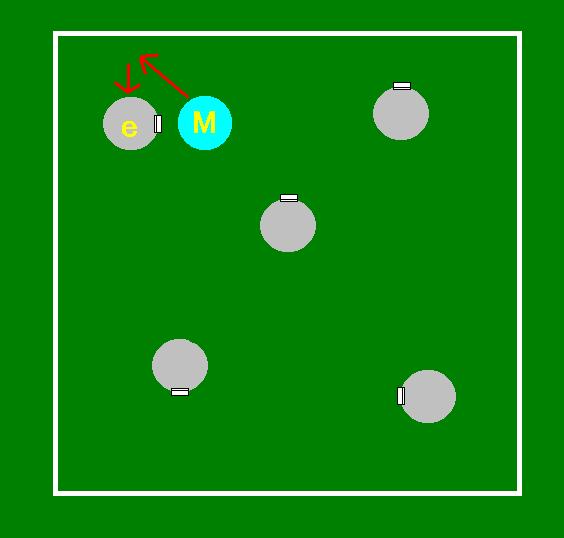
ポストにたどり着いたかどうかの判断は超音波センサと 赤外線センサを平行して使います。