沼津高専 電子制御工学科
白線感知センサの調査
MIRS0201-TECH-0005
改訂記録
版数
作成日
作成者
承認
改訂内容
A01
2002.12.10
鈴木 友也
今村
初版
目次
(1)
主旨
(2)
センサの概要
(3)
その他
(1)主旨
今回のMIRSより壁を使用しない事になった。そのため、場外へMIRS本体が出てしまうことを防ぐために白線を感知し回避するシステムが必要となる。白線を感知するセンサのMIRSへの使用を考える。
(2)センサの概要
センサはフォトセンサ(オムロンEE-SF5-B)を使用する。
フォトセンサはプラスチックパッケージにフォトトランジスタと赤外線LEDが内蔵されたセンサで、5mm程度のところに焦点があります。MIRSに取り付ける際には、床面から4〜6mm程度の位置になるように調整する。
感度調整は、100Ωの半固定抵抗器によって行う。白線の上でON、緑色の床上でOFFになるように調整する。 フォトセンサを床へ向けておき、緑から白へ変わった時の反射される信号の変化により白線を感知する。
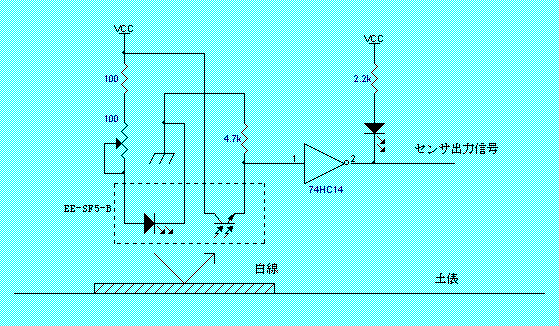
図1は赤外線による反射型フォトセンサで、無変調(LEDに直流電流を流す)回路。
図1 フォトセンサ
(3)その他
使用上の注意として、フォトセンサは外乱(大会会場の証明、日光、フラッシュ、AFカメラの赤外線)に弱く誤動作し易い欠点があり、これを考慮する必要がある。この対策として、外乱が入射しないようにフォトトランジスタの上部を覆ってやる必要がある。実際には、この回路はロボットのシャーシ下部に取り付けるので、特に遮蔽を行う必要は無いと思われる。