概略ブロック図
図1に概略ブロック図を示す。
| MOU:光学式マウス | MPC:モータパワー制御ボード | FD:フラッシュディスク | LCD:液晶ディスプレイボード |
| DB:ドーターボード | USS:超音波センサボード | TEN:テンキー | FPGA:FPGAボード |
| IRS:赤外線ボード | TS:TSタッチセンサ | PD:電源ボード | M:モータ |
| CPU:CPUボード |
各インターフェースについての詳細
- CPUボード-FPGAボード間インターフェイス
- FPGAボード-LCD間インターフェイス
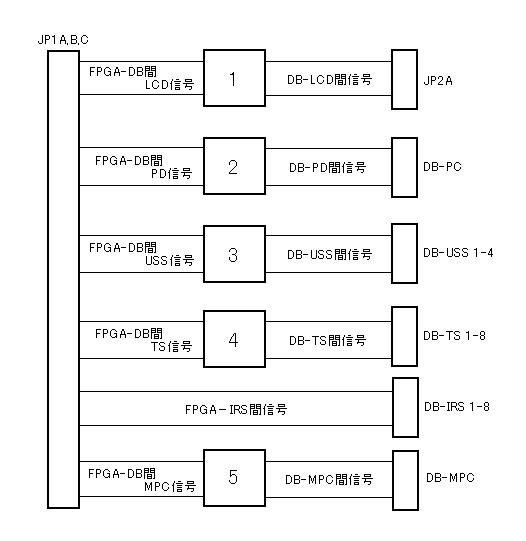
- FPGAボード-ドータボード間インターフェイス
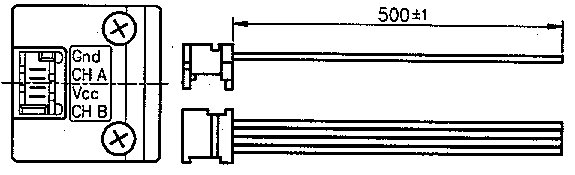
- ドータボード-ロータリエンコーダ間インターフェイス
- ドータボード-タッチセンサ間インターフェイス
- ドータボード-超音波センサ間インターフェイス
- ドータボード-赤外線センサ間インターフェイス
- ドータボード-MotorPower回路間インターフェイス
- ドータボード-PowerDistributor間インターフェイス
- PowerDistributor-MotorPower回路間インターフェイスPowerDistributor-バッテリー間インターフェイス
- MotorPower回路-Motor間インターフェイス
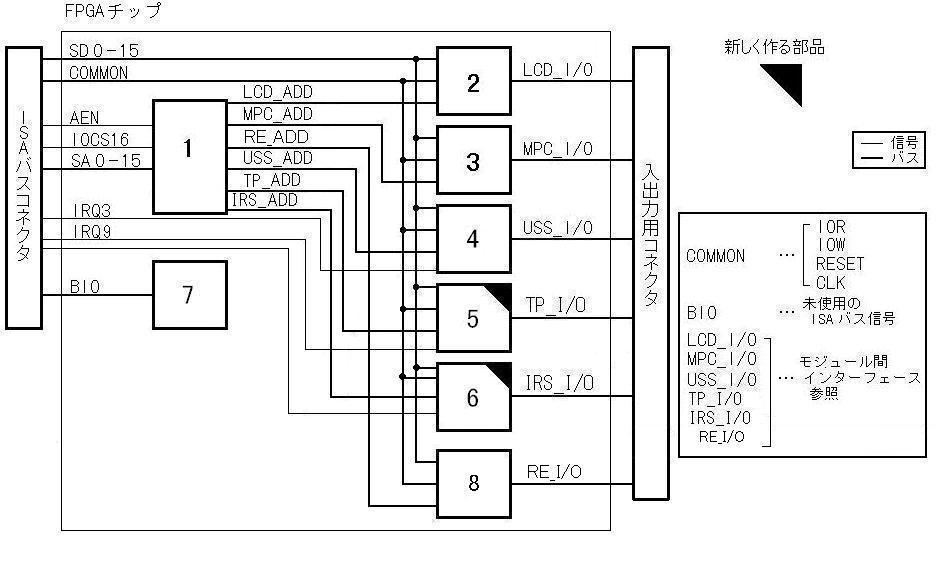
図2にFPGA内部回路のブロック図を示す。
<各モジュールの詳細>
電源系統図
図3に電源系統図を示す。




{kind=link}
{kind=link}